 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYin Zhou
Motion Inspired Unsupervised Perception and Prediction in Autonomous Driving
Oct 14, 2022
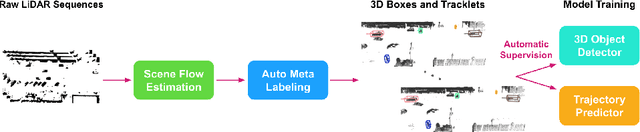
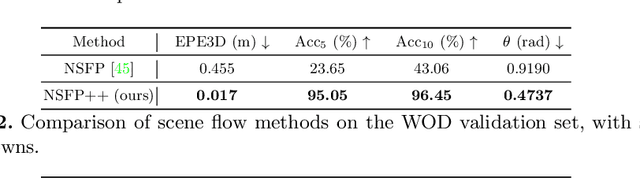

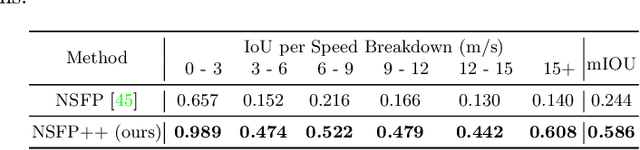
Learning-based perception and prediction modules in modern autonomous driving systems typically rely on expensive human annotation and are designed to perceive only a handful of predefined object categories. This closed-set paradigm is insufficient for the safety-critical autonomous driving task, where the autonomous vehicle needs to process arbitrarily many types of traffic participants and their motion behaviors in a highly dynamic world. To address this difficulty, this paper pioneers a novel and challenging direction, i.e., training perception and prediction models to understand open-set moving objects, with no human supervision. Our proposed framework uses self-learned flow to trigger an automated meta labeling pipeline to achieve automatic supervision. 3D detection experiments on the Waymo Open Dataset show that our method significantly outperforms classical unsupervised approaches and is even competitive to the counterpart with supervised scene flow. We further show that our approach generates highly promising results in open-set 3D detection and trajectory prediction, confirming its potential in closing the safety gap of fully supervised systems.
LidarNAS: Unifying and Searching Neural Architectures for 3D Point Clouds
Oct 10, 2022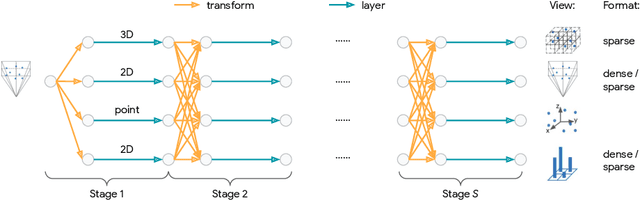
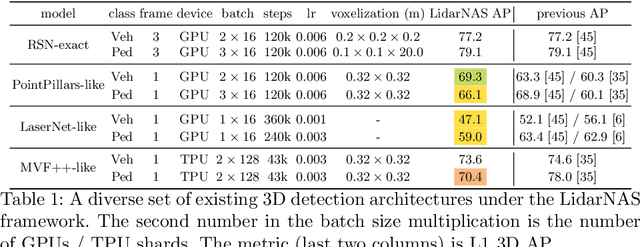

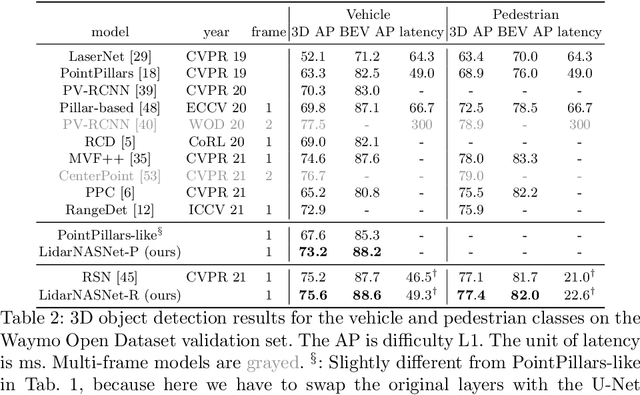
Developing neural models that accurately understand objects in 3D point clouds is essential for the success of robotics and autonomous driving. However, arguably due to the higher-dimensional nature of the data (as compared to images), existing neural architectures exhibit a large variety in their designs, including but not limited to the views considered, the format of the neural features, and the neural operations used. Lack of a unified framework and interpretation makes it hard to put these designs in perspective, as well as systematically explore new ones. In this paper, we begin by proposing a unified framework of such, with the key idea being factorizing the neural networks into a series of view transforms and neural layers. We demonstrate that this modular framework can reproduce a variety of existing works while allowing a fair comparison of backbone designs. Then, we show how this framework can easily materialize into a concrete neural architecture search (NAS) space, allowing a principled NAS-for-3D exploration. In performing evolutionary NAS on the 3D object detection task on the Waymo Open Dataset, not only do we outperform the state-of-the-art models, but also report the interesting finding that NAS tends to discover the same macro-level architecture concept for both the vehicle and pedestrian classes.
RIDDLE: Lidar Data Compression with Range Image Deep Delta Encoding
Jun 02, 2022
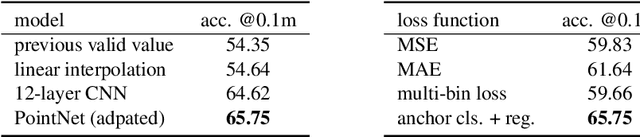

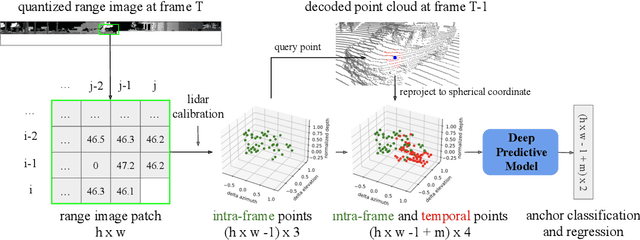
Lidars are depth measuring sensors widely used in autonomous driving and augmented reality. However, the large volume of data produced by lidars can lead to high costs in data storage and transmission. While lidar data can be represented as two interchangeable representations: 3D point clouds and range images, most previous work focus on compressing the generic 3D point clouds. In this work, we show that directly compressing the range images can leverage the lidar scanning pattern, compared to compressing the unprojected point clouds. We propose a novel data-driven range image compression algorithm, named RIDDLE (Range Image Deep DeLta Encoding). At its core is a deep model that predicts the next pixel value in a raster scanning order, based on contextual laser shots from both the current and past scans (represented as a 4D point cloud of spherical coordinates and time). The deltas between predictions and original values can then be compressed by entropy encoding. Evaluated on the Waymo Open Dataset and KITTI, our method demonstrates significant improvement in the compression rate (under the same distortion) compared to widely used point cloud and range image compression algorithms as well as recent deep methods.
Multi-modal 3D Human Pose Estimation with 2D Weak Supervision in Autonomous Driving
Dec 22, 2021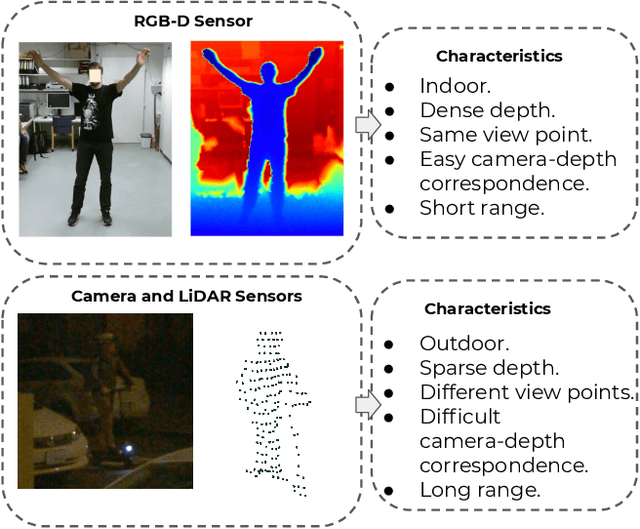
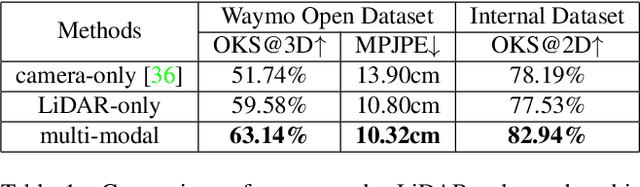
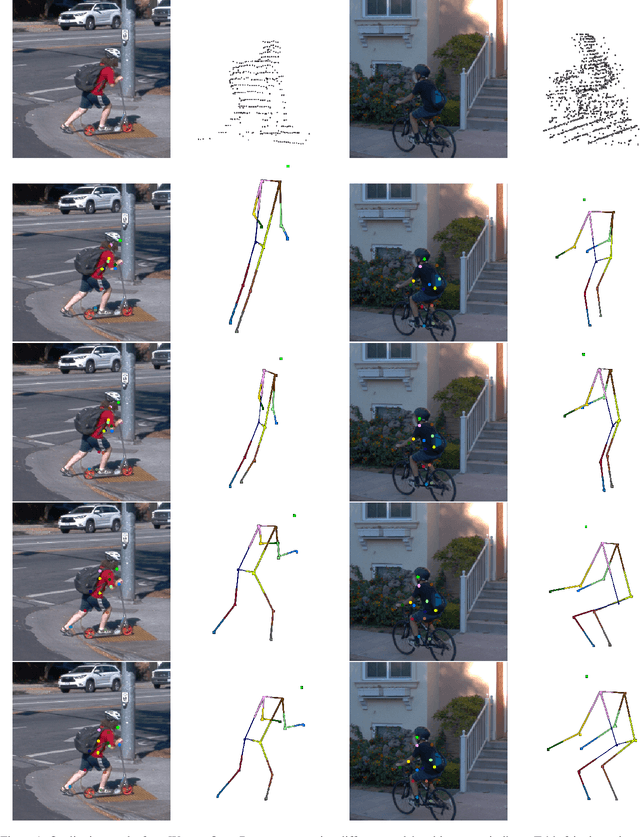
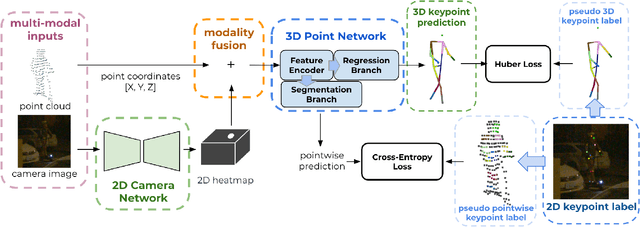
3D human pose estimation (HPE) in autonomous vehicles (AV) differs from other use cases in many factors, including the 3D resolution and range of data, absence of dense depth maps, failure modes for LiDAR, relative location between the camera and LiDAR, and a high bar for estimation accuracy. Data collected for other use cases (such as virtual reality, gaming, and animation) may therefore not be usable for AV applications. This necessitates the collection and annotation of a large amount of 3D data for HPE in AV, which is time-consuming and expensive. In this paper, we propose one of the first approaches to alleviate this problem in the AV setting. Specifically, we propose a multi-modal approach which uses 2D labels on RGB images as weak supervision to perform 3D HPE. The proposed multi-modal architecture incorporates LiDAR and camera inputs with an auxiliary segmentation branch. On the Waymo Open Dataset, our approach achieves a 22% relative improvement over camera-only 2D HPE baseline, and 6% improvement over LiDAR-only model. Finally, careful ablation studies and parts based analysis illustrate the advantages of each of our contributions.
Revisiting 3D Object Detection From an Egocentric Perspective
Dec 14, 2021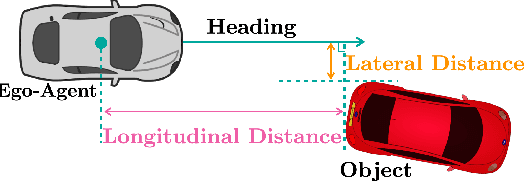
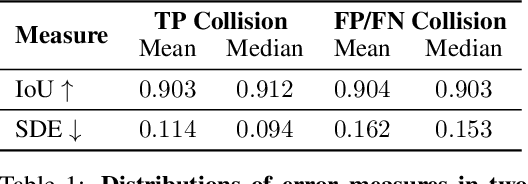
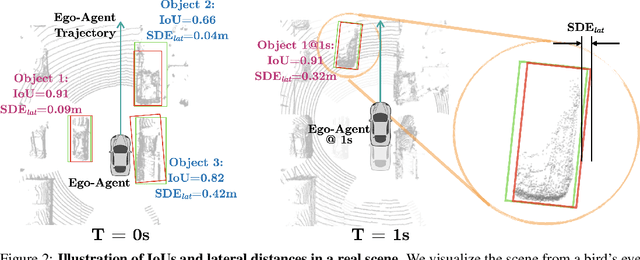
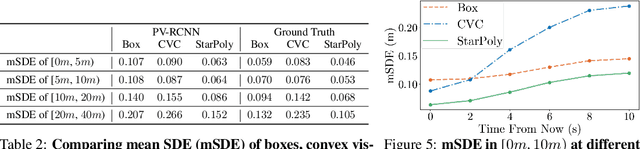
3D object detection is a key module for safety-critical robotics applications such as autonomous driving. For these applications, we care most about how the detections affect the ego-agent's behavior and safety (the egocentric perspective). Intuitively, we seek more accurate descriptions of object geometry when it's more likely to interfere with the ego-agent's motion trajectory. However, current detection metrics, based on box Intersection-over-Union (IoU), are object-centric and aren't designed to capture the spatio-temporal relationship between objects and the ego-agent. To address this issue, we propose a new egocentric measure to evaluate 3D object detection, namely Support Distance Error (SDE). Our analysis based on SDE reveals that the egocentric detection quality is bounded by the coarse geometry of the bounding boxes. Given the insight that SDE would benefit from more accurate geometry descriptions, we propose to represent objects as amodal contours, specifically amodal star-shaped polygons, and devise a simple model, StarPoly, to predict such contours. Our experiments on the large-scale Waymo Open Dataset show that SDE better reflects the impact of detection quality on the ego-agent's safety compared to IoU; and the estimated contours from StarPoly consistently improve the egocentric detection quality over recent 3D object detectors.
SPG: Unsupervised Domain Adaptation for 3D Object Detection via Semantic Point Generation
Aug 15, 2021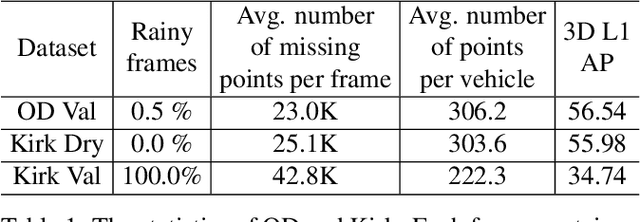
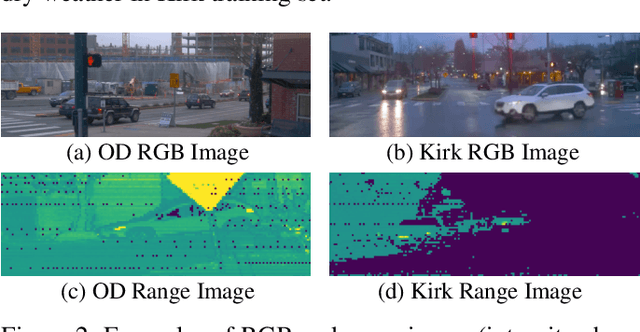
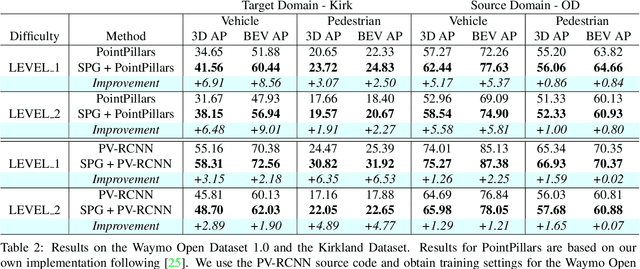
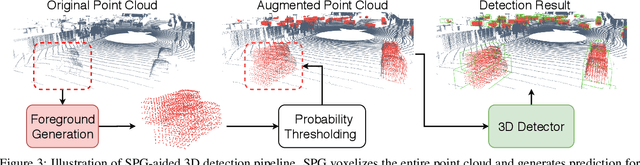
In autonomous driving, a LiDAR-based object detector should perform reliably at different geographic locations and under various weather conditions. While recent 3D detection research focuses on improving performance within a single domain, our study reveals that the performance of modern detectors can drop drastically cross-domain. In this paper, we investigate unsupervised domain adaptation (UDA) for LiDAR-based 3D object detection. On the Waymo Domain Adaptation dataset, we identify the deteriorating point cloud quality as the root cause of the performance drop. To address this issue, we present Semantic Point Generation (SPG), a general approach to enhance the reliability of LiDAR detectors against domain shifts. Specifically, SPG generates semantic points at the predicted foreground regions and faithfully recovers missing parts of the foreground objects, which are caused by phenomena such as occlusions, low reflectance or weather interference. By merging the semantic points with the original points, we obtain an augmented point cloud, which can be directly consumed by modern LiDAR-based detectors. To validate the wide applicability of SPG, we experiment with two representative detectors, PointPillars and PV-RCNN. On the UDA task, SPG significantly improves both detectors across all object categories of interest and at all difficulty levels. SPG can also benefit object detection in the original domain. On the Waymo Open Dataset and KITTI, SPG improves 3D detection results of these two methods across all categories. Combined with PV-RCNN, SPG achieves state-of-the-art 3D detection results on KITTI.
Large Scale Interactive Motion Forecasting for Autonomous Driving : The Waymo Open Motion Dataset
Apr 20, 2021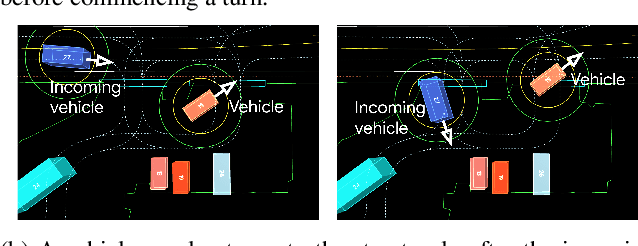
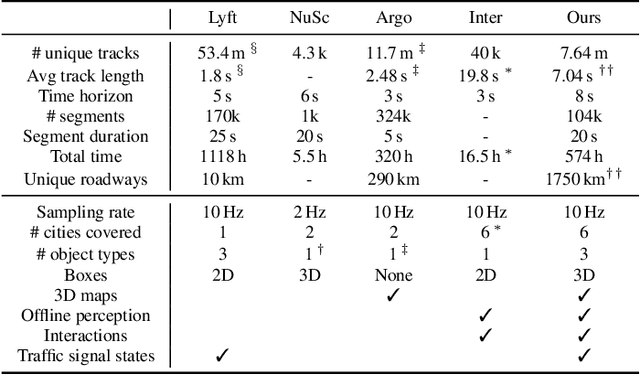
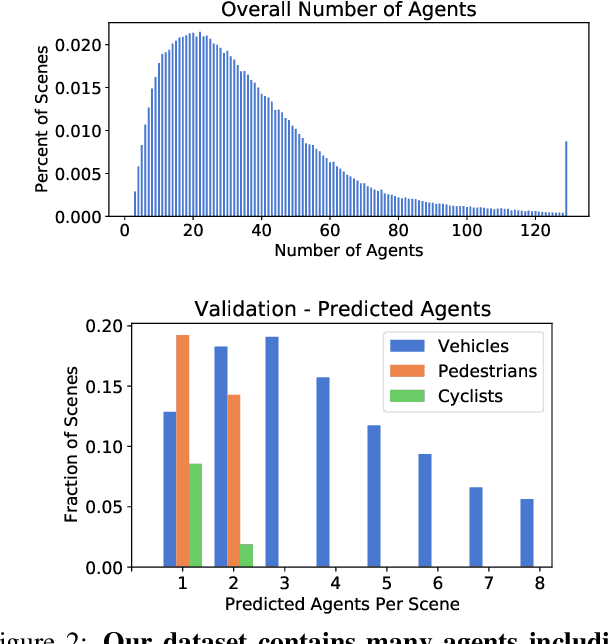
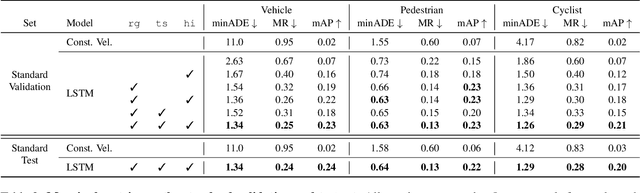
As autonomous driving systems mature, motion forecasting has received increasing attention as a critical requirement for planning. Of particular importance are interactive situations such as merges, unprotected turns, etc., where predicting individual object motion is not sufficient. Joint predictions of multiple objects are required for effective route planning. There has been a critical need for high-quality motion data that is rich in both interactions and annotation to develop motion planning models. In this work, we introduce the most diverse interactive motion dataset to our knowledge, and provide specific labels for interacting objects suitable for developing joint prediction models. With over 100,000 scenes, each 20 seconds long at 10 Hz, our new dataset contains more than 570 hours of unique data over 1750 km of roadways. It was collected by mining for interesting interactions between vehicles, pedestrians, and cyclists across six cities within the United States. We use a high-accuracy 3D auto-labeling system to generate high quality 3D bounding boxes for each road agent, and provide corresponding high definition 3D maps for each scene. Furthermore, we introduce a new set of metrics that provides a comprehensive evaluation of both single agent and joint agent interaction motion forecasting models. Finally, we provide strong baseline models for individual-agent prediction and joint-prediction. We hope that this new large-scale interactive motion dataset will provide new opportunities for advancing motion forecasting models.
3D-MAN: 3D Multi-frame Attention Network for Object Detection
Mar 30, 2021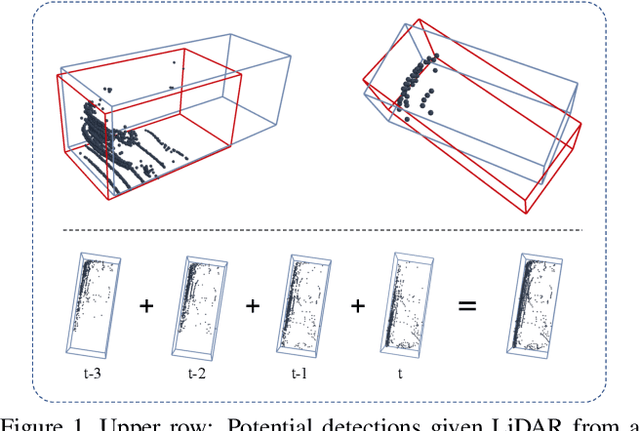

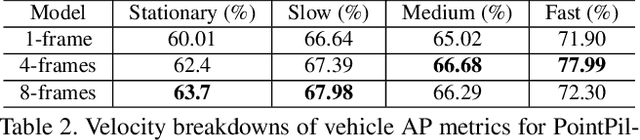
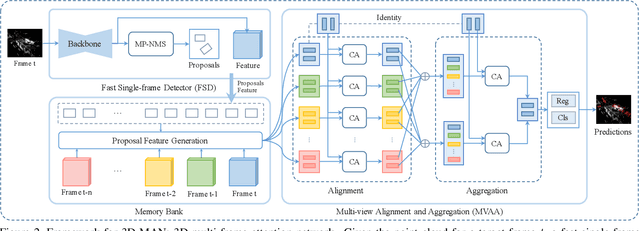
3D object detection is an important module in autonomous driving and robotics. However, many existing methods focus on using single frames to perform 3D detection, and do not fully utilize information from multiple frames. In this paper, we present 3D-MAN: a 3D multi-frame attention network that effectively aggregates features from multiple perspectives and achieves state-of-the-art performance on Waymo Open Dataset. 3D-MAN first uses a novel fast single-frame detector to produce box proposals. The box proposals and their corresponding feature maps are then stored in a memory bank. We design a multi-view alignment and aggregation module, using attention networks, to extract and aggregate the temporal features stored in the memory bank. This effectively combines the features coming from different perspectives of the scene. We demonstrate the effectiveness of our approach on the large-scale complex Waymo Open Dataset, achieving state-of-the-art results compared to published single-frame and multi-frame methods.
Offboard 3D Object Detection from Point Cloud Sequences
Mar 08, 2021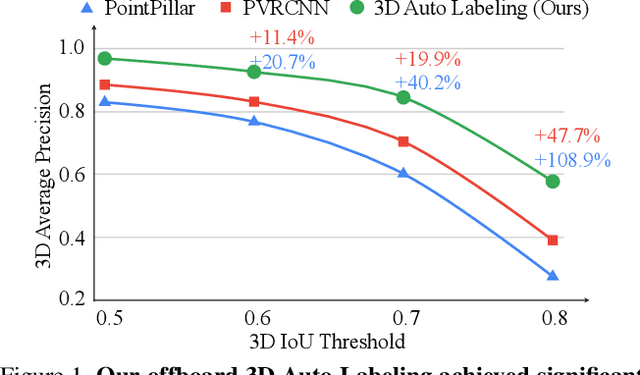
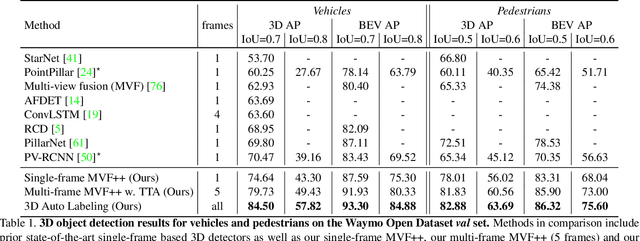
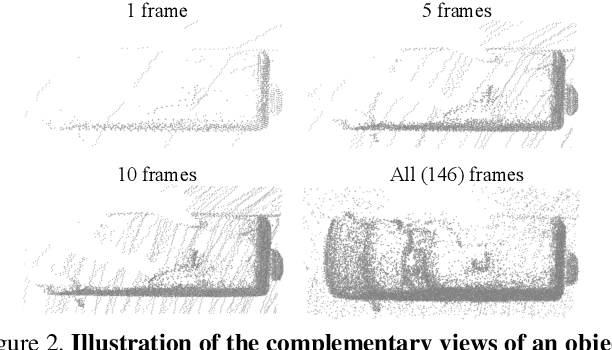
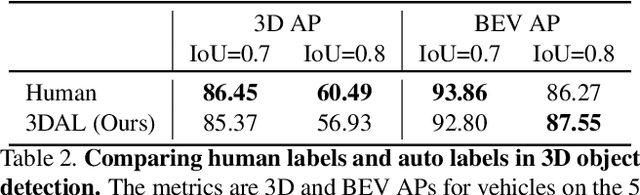
While current 3D object recognition research mostly focuses on the real-time, onboard scenario, there are many offboard use cases of perception that are largely under-explored, such as using machines to automatically generate high-quality 3D labels. Existing 3D object detectors fail to satisfy the high-quality requirement for offboard uses due to the limited input and speed constraints. In this paper, we propose a novel offboard 3D object detection pipeline using point cloud sequence data. Observing that different frames capture complementary views of objects, we design the offboard detector to make use of the temporal points through both multi-frame object detection and novel object-centric refinement models. Evaluated on the Waymo Open Dataset, our pipeline named 3D Auto Labeling shows significant gains compared to the state-of-the-art onboard detectors and our offboard baselines. Its performance is even on par with human labels verified through a human label study. Further experiments demonstrate the application of auto labels for semi-supervised learning and provide extensive analysis to validate various design choices.
SurfelGAN: Synthesizing Realistic Sensor Data for Autonomous Driving
May 08, 2020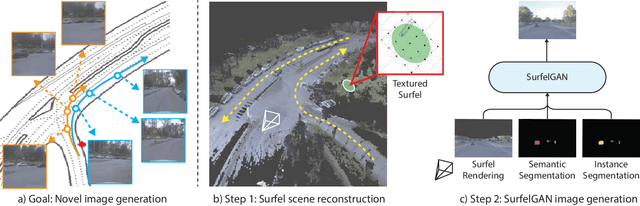
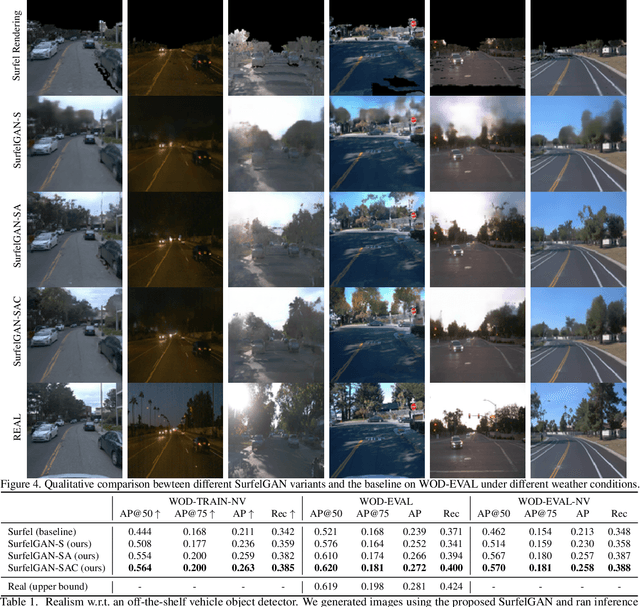

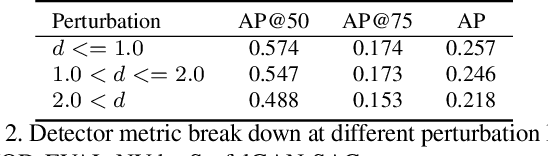
Autonomous driving system development is critically dependent on the ability to replay complex and diverse traffic scenarios in simulation. In such scenarios, the ability to accurately simulate the vehicle sensors such as cameras, lidar or radar is essential. However, current sensor simulators leverage gaming engines such as Unreal or Unity, requiring manual creation of environments, objects and material properties. Such approaches have limited scalability and fail to produce realistic approximations of camera, lidar, and radar data without significant additional work. In this paper, we present a simple yet effective approach to generate realistic scenario sensor data, based only on a limited amount of lidar and camera data collected by an autonomous vehicle. Our approach uses texture-mapped surfels to efficiently reconstruct the scene from an initial vehicle pass or set of passes, preserving rich information about object 3D geometry and appearance, as well as the scene conditions. We then leverage a SurfelGAN network to reconstruct realistic camera images for novel positions and orientations of the self-driving vehicle and moving objects in the scene. We demonstrate our approach on the Waymo Open Dataset and show that it can synthesize realistic camera data for simulated scenarios. We also create a novel dataset that contains cases in which two self-driving vehicles observe the same scene at the same time. We use this dataset to provide additional evaluation and demonstrate the usefulness of our SurfelGAN model.