 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLESS: Label-Efficient Semantic Segmentation for LiDAR Point Clouds
Paper and Code
Oct 14, 2022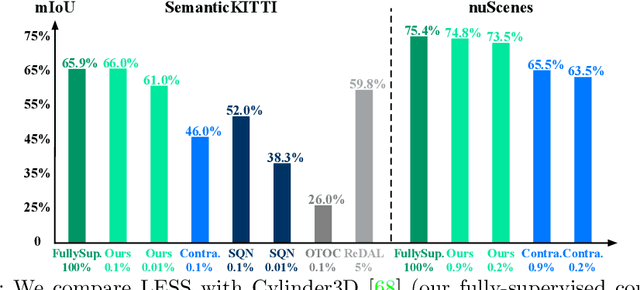
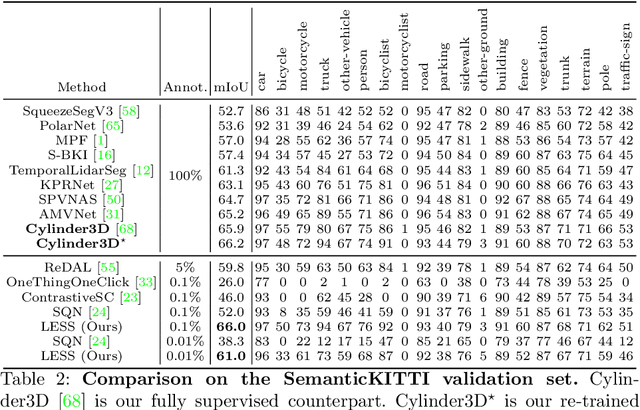
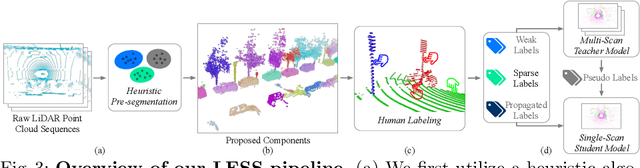
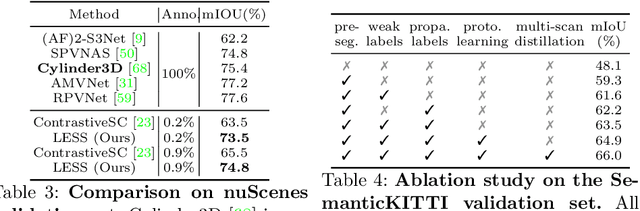
Semantic segmentation of LiDAR point clouds is an important task in autonomous driving. However, training deep models via conventional supervised methods requires large datasets which are costly to label. It is critical to have label-efficient segmentation approaches to scale up the model to new operational domains or to improve performance on rare cases. While most prior works focus on indoor scenes, we are one of the first to propose a label-efficient semantic segmentation pipeline for outdoor scenes with LiDAR point clouds. Our method co-designs an efficient labeling process with semi/weakly supervised learning and is applicable to nearly any 3D semantic segmentation backbones. Specifically, we leverage geometry patterns in outdoor scenes to have a heuristic pre-segmentation to reduce the manual labeling and jointly design the learning targets with the labeling process. In the learning step, we leverage prototype learning to get more descriptive point embeddings and use multi-scan distillation to exploit richer semantics from temporally aggregated point clouds to boost the performance of single-scan models. Evaluated on the SemanticKITTI and the nuScenes datasets, we show that our proposed method outperforms existing label-efficient methods. With extremely limited human annotations (e.g., 0.1% point labels), our proposed method is even highly competitive compared to the fully supervised counterpart with 100% labels.