 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLight Up Your Face: A Physically Consistent Dataset and Diffusion Model for Face Fill-Light Enhancement
Feb 04, 2026Face fill-light enhancement (FFE) brightens underexposed faces by adding virtual fill light while keeping the original scene illumination and background unchanged. Most face relighting methods aim to reshape overall lighting, which can suppress the input illumination or modify the entire scene, leading to foreground-background inconsistency and mismatching practical FFE needs. To support scalable learning, we introduce LightYourFace-160K (LYF-160K), a large-scale paired dataset built with a physically consistent renderer that injects a disk-shaped area fill light controlled by six disentangled factors, producing 160K before-and-after pairs. We first pretrain a physics-aware lighting prompt (PALP) that embeds the 6D parameters into conditioning tokens, using an auxiliary planar-light reconstruction objective. Building on a pretrained diffusion backbone, we then train a fill-light diffusion (FiLitDiff), an efficient one-step model conditioned on physically grounded lighting codes, enabling controllable and high-fidelity fill lighting at low computational cost. Experiments on held-out paired sets demonstrate strong perceptual quality and competitive full-reference metrics, while better preserving background illumination. The dataset and model will be at https://github.com/gobunu/Light-Up-Your-Face.
Stabilizing Diffusion Posterior Sampling by Noise--Frequency Continuation
Jan 30, 2026Diffusion posterior sampling solves inverse problems by combining a pretrained diffusion prior with measurement-consistency guidance, but it often fails to recover fine details because measurement terms are applied in a manner that is weakly coupled to the diffusion noise level. At high noise, data-consistency gradients computed from inaccurate estimates can be geometrically incongruent with the posterior geometry, inducing early-step drift, spurious high-frequency artifacts, plus sensitivity to schedules and ill-conditioned operators. To address these concerns, we propose a noise--frequency Continuation framework that constructs a continuous family of intermediate posteriors whose likelihood enforces measurement consistency only within a noise-dependent frequency band. This principle is instantiated with a stabilized posterior sampler that combines a diffusion predictor, band-limited likelihood guidance, and a multi-resolution consistency strategy that aggressively commits reliable coarse corrections while conservatively adopting high-frequency details only when they become identifiable. Across super-resolution, inpainting, and deblurring, our method achieves state-of-the-art performance and improves motion deblurring PSNR by up to 5 dB over strong baselines.
Learning Domain Knowledge in Multimodal Large Language Models through Reinforcement Fine-Tuning
Jan 23, 2026Multimodal large language models (MLLMs) have shown remarkable capabilities in multimodal perception and understanding tasks. However, their effectiveness in specialized domains, such as remote sensing and medical imaging, remains limited. A natural approach to domain adaptation is to inject domain knowledge through textual instructions, prompts, or auxiliary captions. Surprisingly, we find that such input-level domain knowledge injection yields little to no improvement on scientific multimodal tasks, even when the domain knowledge is explicitly provided. This observation suggests that current MLLMs fail to internalize domain-specific priors through language alone, and that domain knowledge must be integrated at the optimization level. Motivated by this insight, we propose a reinforcement fine-tuning framework that incorporates domain knowledge directly into the learning objective. Instead of treating domain knowledge as descriptive information, we encode it as domain-informed constraints and reward signals, shaping the model's behavior in the output space. Extensive experiments across multiple datasets in remote sensing and medical domains consistently demonstrate good performance gains, achieving state-of-the-art results on multimodal domain tasks. Our results highlight the necessity of optimization-level domain knowledge integration and reveal a fundamental limitation of textual domain conditioning in current MLLMs.
Fine-Grained Human Pose Editing Assessment via Layer-Selective MLLMs
Jan 15, 2026Text-guided human pose editing has gained significant traction in AIGC applications. However,it remains plagued by structural anomalies and generative artifacts. Existing evaluation metrics often isolate authenticity detection from quality assessment, failing to provide fine-grained insights into pose-specific inconsistencies. To address these limitations, we introduce HPE-Bench, a specialized benchmark comprising 1,700 standardized samples from 17 state-of-the-art editing models, offering both authenticity labels and multi-dimensional quality scores. Furthermore, we propose a unified framework based on layer-selective multimodal large language models (MLLMs). By employing contrastive LoRA tuning and a novel layer sensitivity analysis (LSA) mechanism, we identify the optimal feature layer for pose evaluation. Our framework achieves superior performance in both authenticity detection and multi-dimensional quality regression, effectively bridging the gap between forensic detection and quality assessment.
SingingBot: An Avatar-Driven System for Robotic Face Singing Performance
Jan 05, 2026Equipping robotic faces with singing capabilities is crucial for empathetic Human-Robot Interaction. However, existing robotic face driving research primarily focuses on conversations or mimicking static expressions, struggling to meet the high demands for continuous emotional expression and coherence in singing. To address this, we propose a novel avatar-driven framework for appealing robotic singing. We first leverage portrait video generation models embedded with extensive human priors to synthesize vivid singing avatars, providing reliable expression and emotion guidance. Subsequently, these facial features are transferred to the robot via semantic-oriented mapping functions that span a wide expression space. Furthermore, to quantitatively evaluate the emotional richness of robotic singing, we propose the Emotion Dynamic Range metric to measure the emotional breadth within the Valence-Arousal space, revealing that a broad emotional spectrum is crucial for appealing performances. Comprehensive experiments prove that our method achieves rich emotional expressions while maintaining lip-audio synchronization, significantly outperforming existing approaches.
POLAR: A Portrait OLAT Dataset and Generative Framework for Illumination-Aware Face Modeling
Dec 16, 2025Face relighting aims to synthesize realistic portraits under novel illumination while preserving identity and geometry. However, progress remains constrained by the limited availability of large-scale, physically consistent illumination data. To address this, we introduce POLAR, a large-scale and physically calibrated One-Light-at-a-Time (OLAT) dataset containing over 200 subjects captured under 156 lighting directions, multiple views, and diverse expressions. Building upon POLAR, we develop a flow-based generative model POLARNet that predicts per-light OLAT responses from a single portrait, capturing fine-grained and direction-aware illumination effects while preserving facial identity. Unlike diffusion or background-conditioned methods that rely on statistical or contextual cues, our formulation models illumination as a continuous, physically interpretable transformation between lighting states, enabling scalable and controllable relighting. Together, POLAR and POLARNet form a unified illumination learning framework that links real data, generative synthesis, and physically grounded relighting, establishing a self-sustaining "chicken-and-egg" cycle for scalable and reproducible portrait illumination. Our project page: https://rex0191.github.io/POLAR/.
MoRE: 3D Visual Geometry Reconstruction Meets Mixture-of-Experts
Oct 31, 2025Recent advances in language and vision have demonstrated that scaling up model capacity consistently improves performance across diverse tasks. In 3D visual geometry reconstruction, large-scale training has likewise proven effective for learning versatile representations. However, further scaling of 3D models is challenging due to the complexity of geometric supervision and the diversity of 3D data. To overcome these limitations, we propose MoRE, a dense 3D visual foundation model based on a Mixture-of-Experts (MoE) architecture that dynamically routes features to task-specific experts, allowing them to specialize in complementary data aspects and enhance both scalability and adaptability. Aiming to improve robustness under real-world conditions, MoRE incorporates a confidence-based depth refinement module that stabilizes and refines geometric estimation. In addition, it integrates dense semantic features with globally aligned 3D backbone representations for high-fidelity surface normal prediction. MoRE is further optimized with tailored loss functions to ensure robust learning across diverse inputs and multiple geometric tasks. Extensive experiments demonstrate that MoRE achieves state-of-the-art performance across multiple benchmarks and supports effective downstream applications without extra computation.
Scaling Up Occupancy-centric Driving Scene Generation: Dataset and Method
Oct 27, 2025



Driving scene generation is a critical domain for autonomous driving, enabling downstream applications, including perception and planning evaluation. Occupancy-centric methods have recently achieved state-of-the-art results by offering consistent conditioning across frames and modalities; however, their performance heavily depends on annotated occupancy data, which still remains scarce. To overcome this limitation, we curate Nuplan-Occ, the largest semantic occupancy dataset to date, constructed from the widely used Nuplan benchmark. Its scale and diversity facilitate not only large-scale generative modeling but also autonomous driving downstream applications. Based on this dataset, we develop a unified framework that jointly synthesizes high-quality semantic occupancy, multi-view videos, and LiDAR point clouds. Our approach incorporates a spatio-temporal disentangled architecture to support high-fidelity spatial expansion and temporal forecasting of 4D dynamic occupancy. To bridge modal gaps, we further propose two novel techniques: a Gaussian splatting-based sparse point map rendering strategy that enhances multi-view video generation, and a sensor-aware embedding strategy that explicitly models LiDAR sensor properties for realistic multi-LiDAR simulation. Extensive experiments demonstrate that our method achieves superior generation fidelity and scalability compared to existing approaches, and validates its practical value in downstream tasks. Repo: https://github.com/Arlo0o/UniScene-Unified-Occupancy-centric-Driving-Scene-Generation/tree/v2
FieldGen: From Teleoperated Pre-Manipulation Trajectories to Field-Guided Data Generation
Oct 23, 2025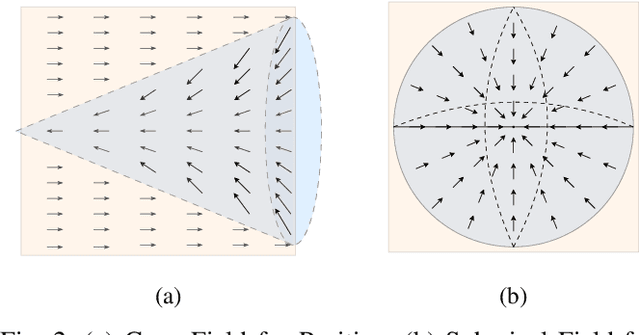
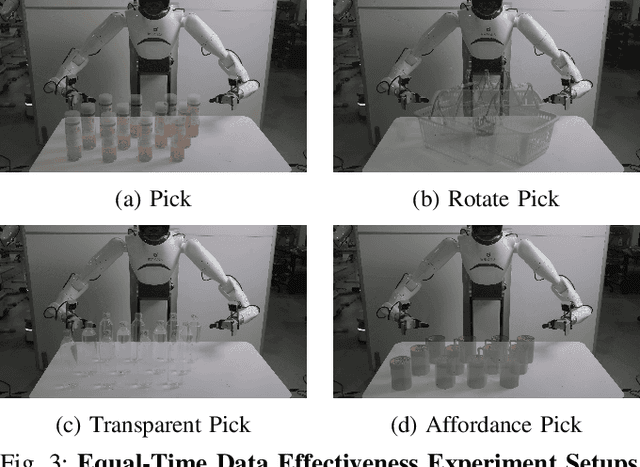
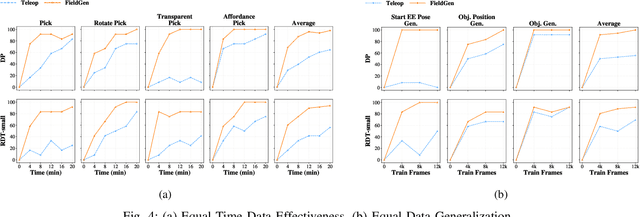
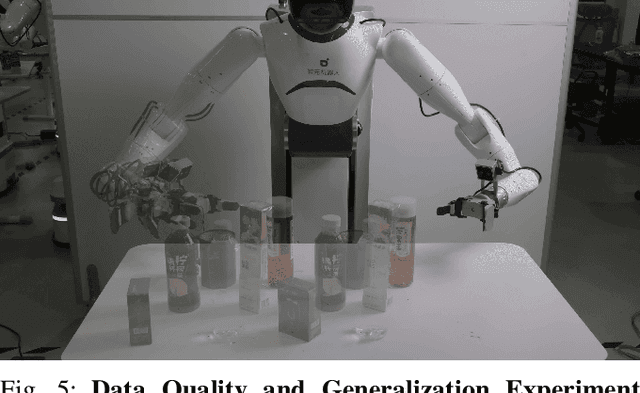
Large-scale and diverse datasets are vital for training robust robotic manipulation policies, yet existing data collection methods struggle to balance scale, diversity, and quality. Simulation offers scalability but suffers from sim-to-real gaps, while teleoperation yields high-quality demonstrations with limited diversity and high labor cost. We introduce FieldGen, a field-guided data generation framework that enables scalable, diverse, and high-quality real-world data collection with minimal human supervision. FieldGen decomposes manipulation into two stages: a pre-manipulation phase, allowing trajectory diversity, and a fine manipulation phase requiring expert precision. Human demonstrations capture key contact and pose information, after which an attraction field automatically generates diverse trajectories converging to successful configurations. This decoupled design combines scalable trajectory diversity with precise supervision. Moreover, FieldGen-Reward augments generated data with reward annotations to further enhance policy learning. Experiments demonstrate that policies trained with FieldGen achieve higher success rates and improved stability compared to teleoperation-based baselines, while significantly reducing human effort in long-term real-world data collection. Webpage is available at https://fieldgen.github.io/.
Expertise need not monopolize: Action-Specialized Mixture of Experts for Vision-Language-Action Learning
Oct 16, 2025Vision-Language-Action (VLA) models are experiencing rapid development and demonstrating promising capabilities in robotic manipulation tasks. However, scaling up VLA models presents several critical challenges: (1) Training new VLA models from scratch demands substantial computational resources and extensive datasets. Given the current scarcity of robot data, it becomes particularly valuable to fully leverage well-pretrained VLA model weights during the scaling process. (2) Real-time control requires carefully balancing model capacity with computational efficiency. To address these challenges, We propose AdaMoE, a Mixture-of-Experts (MoE) architecture that inherits pretrained weights from dense VLA models, and scales up the action expert by substituting the feedforward layers into sparsely activated MoE layers. AdaMoE employs a decoupling technique that decouples expert selection from expert weighting through an independent scale adapter working alongside the traditional router. This enables experts to be selected based on task relevance while contributing with independently controlled weights, allowing collaborative expert utilization rather than winner-takes-all dynamics. Our approach demonstrates that expertise need not monopolize. Instead, through collaborative expert utilization, we can achieve superior performance while maintaining computational efficiency. AdaMoE consistently outperforms the baseline model across key benchmarks, delivering performance gains of 1.8% on LIBERO and 9.3% on RoboTwin. Most importantly, a substantial 21.5% improvement in real-world experiments validates its practical effectiveness for robotic manipulation tasks.