 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShareable Driving Style Learning and Analysis with a Hierarchical Latent Model
Oct 24, 2023Driving style is usually used to characterize driving behavior for a driver or a group of drivers. However, it remains unclear how one individual's driving style shares certain common grounds with other drivers. Our insight is that driving behavior is a sequence of responses to the weighted mixture of latent driving styles that are shareable within and between individuals. To this end, this paper develops a hierarchical latent model to learn the relationship between driving behavior and driving styles. We first propose a fragment-based approach to represent complex sequential driving behavior, allowing for sufficiently representing driving behavior in a low-dimension feature space. Then, we provide an analytical formulation for the interaction of driving behavior and shareable driving style with a hierarchical latent model by introducing the mechanism of Dirichlet allocation. Our developed model is finally validated and verified with 100 drivers in naturalistic driving settings with urban and highways. Experimental results reveal that individuals share driving styles within and between them. We also analyzed the influence of personalities (e.g., age, gender, and driving experience) on driving styles and found that a naturally aggressive driver would not always keep driving aggressively (i.e., could behave calmly sometimes) but with a higher proportion of aggressiveness than other types of drivers.
Interactive Car-Following: Matters but NOT Always
Jul 30, 2023



Following a leading vehicle is a daily but challenging task because it requires adapting to various traffic conditions and the leading vehicle's behaviors. However, the question `Does the following vehicle always actively react to the leading vehicle?' remains open. To seek the answer, we propose a novel metric to quantify the interaction intensity within the car-following pairs. The quantified interaction intensity enables us to recognize interactive and non-interactive car-following scenarios and derive corresponding policies for each scenario. Then, we develop an interaction-aware switching control framework with interactive and non-interactive policies, achieving a human-level car-following performance. The extensive simulations demonstrate that our interaction-aware switching control framework achieves improved control performance and data efficiency compared to the unified control strategies. Moreover, the experimental results reveal that human drivers would not always keep reacting to their leading vehicle but occasionally take safety-critical or intentional actions -- interaction matters but not always.
Efficient Reinforcement Learning for Autonomous Driving with Parameterized Skills and Priors
May 08, 2023When autonomous vehicles are deployed on public roads, they will encounter countless and diverse driving situations. Many manually designed driving policies are difficult to scale to the real world. Fortunately, reinforcement learning has shown great success in many tasks by automatic trial and error. However, when it comes to autonomous driving in interactive dense traffic, RL agents either fail to learn reasonable performance or necessitate a large amount of data. Our insight is that when humans learn to drive, they will 1) make decisions over the high-level skill space instead of the low-level control space and 2) leverage expert prior knowledge rather than learning from scratch. Inspired by this, we propose ASAP-RL, an efficient reinforcement learning algorithm for autonomous driving that simultaneously leverages motion skills and expert priors. We first parameterized motion skills, which are diverse enough to cover various complex driving scenarios and situations. A skill parameter inverse recovery method is proposed to convert expert demonstrations from control space to skill space. A simple but effective double initialization technique is proposed to leverage expert priors while bypassing the issue of expert suboptimality and early performance degradation. We validate our proposed method on interactive dense-traffic driving tasks given simple and sparse rewards. Experimental results show that our method can lead to higher learning efficiency and better driving performance relative to previous methods that exploit skills and priors differently. Code is open-sourced to facilitate further research.
Understanding Bugs in Multi-Language Deep Learning Frameworks
Mar 05, 2023



Deep learning frameworks (DLFs) have been playing an increasingly important role in this intelligence age since they act as a basic infrastructure for an increasingly wide range of AIbased applications. Meanwhile, as multi-programming-language (MPL) software systems, DLFs are inevitably suffering from bugs caused by the use of multiple programming languages (PLs). Hence, it is of paramount significance to understand the bugs (especially the bugs involving multiple PLs, i.e., MPL bugs) of DLFs, which can provide a foundation for preventing, detecting, and resolving bugs in the development of DLFs. To this end, we manually analyzed 1497 bugs in three MPL DLFs, namely MXNet, PyTorch, and TensorFlow. First, we classified bugs in these DLFs into 12 types (e.g., algorithm design bugs and memory bugs) according to their bug labels and characteristics. Second, we further explored the impacts of different bug types on the development of DLFs, and found that deployment bugs and memory bugs negatively impact the development of DLFs in different aspects the most. Third, we found that 28.6%, 31.4%, and 16.0% of bugs in MXNet, PyTorch, and TensorFlow are MPL bugs, respectively; the PL combination of Python and C/C++ is most used in fixing more than 92% MPL bugs in all DLFs. Finally, the code change complexity of MPL bug fixes is significantly greater than that of single-programming-language (SPL) bug fixes in all the three DLFs, while in PyTorch MPL bug fixes have longer open time and greater communication complexity than SPL bug fixes. These results provide insights for bug management in DLFs.
On Trustworthy Decision-Making Process of Human Drivers from the View of Perceptual Uncertainty Reduction
Oct 15, 2022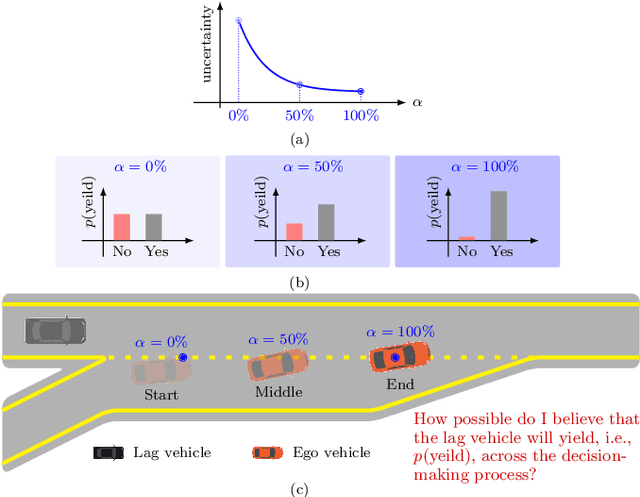
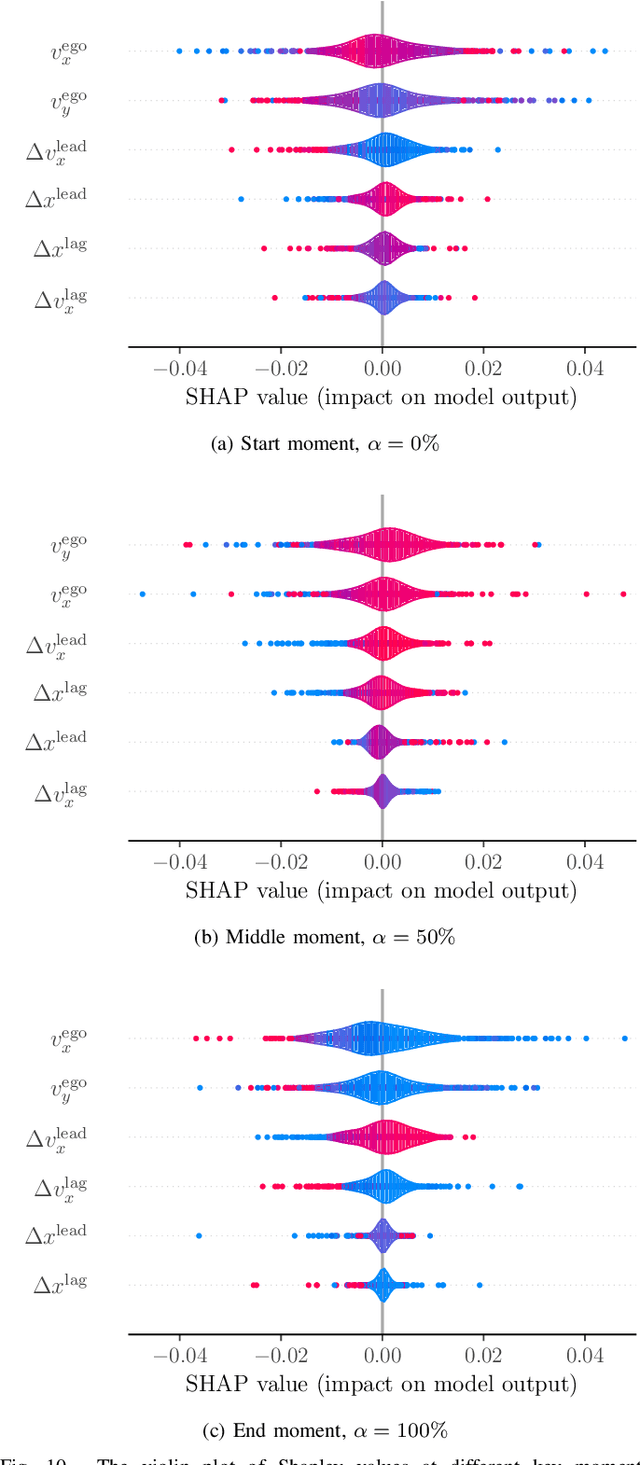
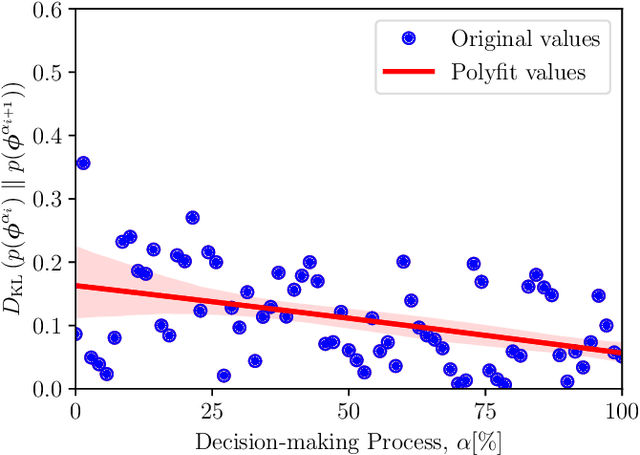
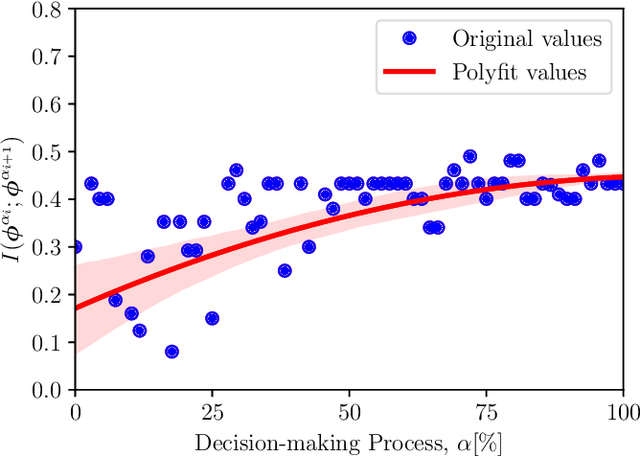
Humans are experts in making decisions for challenging driving tasks with uncertainties. Many efforts have been made to model the decision-making process of human drivers at the behavior level. However, limited studies explain how human drivers actively make reliable sequential decisions to complete interactive driving tasks in an uncertain environment. This paper argues that human drivers intently search for actions to reduce the uncertainty of their perception of the environment, i.e., perceptual uncertainty, to a low level that allows them to make a trustworthy decision easily. This paper provides a proof of concept framework to empirically reveal that human drivers' perceptual uncertainty decreases when executing interactive tasks with uncertainties. We first introduce an explainable-artificial intelligence approach (i.e., SHapley Additive exPlanation, SHAP) to determine the salient features on which human drivers make decisions. Then, we use entropy-based measures to quantify the drivers' perceptual changes in these ranked salient features across the decision-making process, reflecting the changes in uncertainties. The validation and verification of our proposed method are conducted in the highway on-ramp merging scenario with congested traffic using the INTERACTION dataset. Experimental results support that human drivers intentionally seek information to reduce their perceptual uncertainties in the number and rank of salient features of their perception of environments to make a trustworthy decision.
Accelerating Reinforcement Learning for Autonomous Driving using Task-Agnostic and Ego-Centric Motion Skills
Sep 24, 2022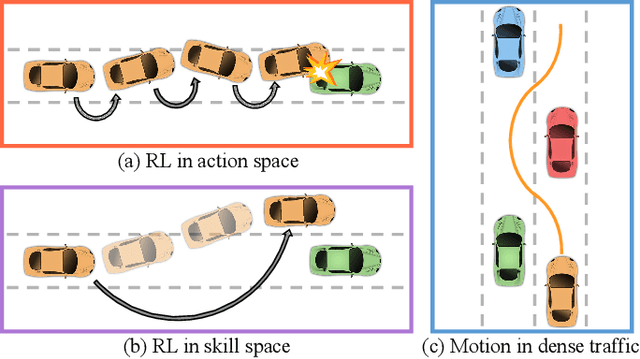
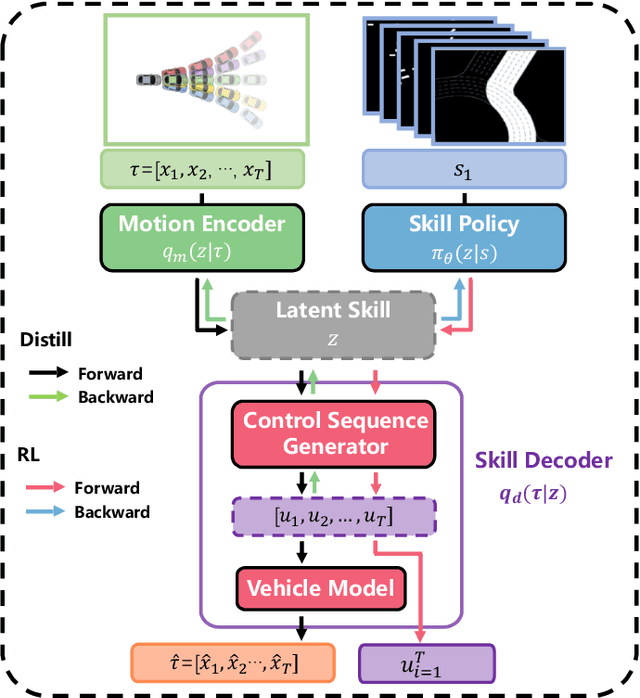
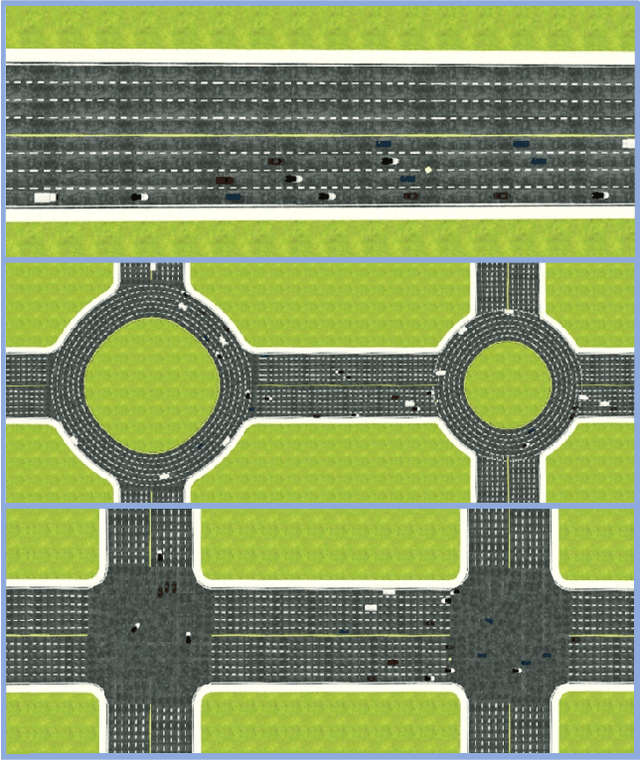
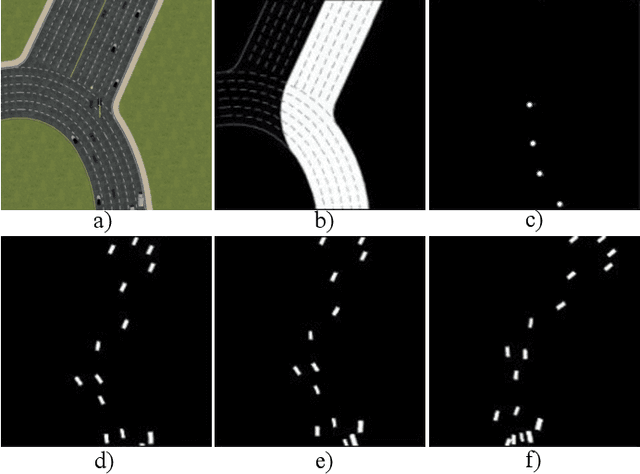
Efficient and effective exploration in continuous space is a central problem in applying reinforcement learning (RL) to autonomous driving. Skills learned from expert demonstrations or designed for specific tasks can benefit the exploration, but they are usually costly-collected, unbalanced/sub-optimal, or failing to transfer to diverse tasks. However, human drivers can adapt to varied driving tasks without demonstrations by taking efficient and structural explorations in the entire skill space rather than a limited space with task-specific skills. Inspired by the above fact, we propose an RL algorithm exploring all feasible motion skills instead of a limited set of task-specific and object-centric skills. Without demonstrations, our method can still perform well in diverse tasks. First, we build a task-agnostic and ego-centric (TaEc) motion skill library in a pure motion perspective, which is diverse enough to be reusable in different complex tasks. The motion skills are then encoded into a low-dimension latent skill space, in which RL can do exploration efficiently. Validations in various challenging driving scenarios demonstrate that our proposed method, TaEc-RL, outperforms its counterparts significantly in learning efficiency and task performance.
Social Interactions for Autonomous Driving: A Review and Perspective
Aug 17, 2022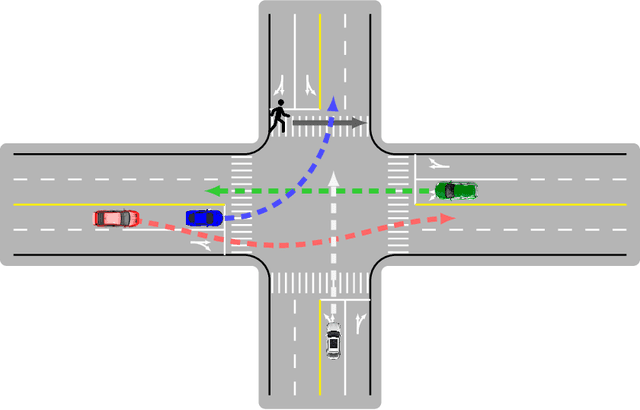
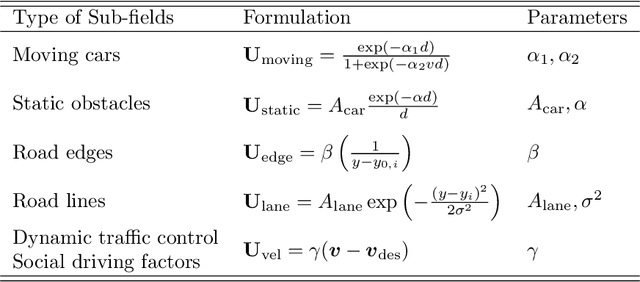
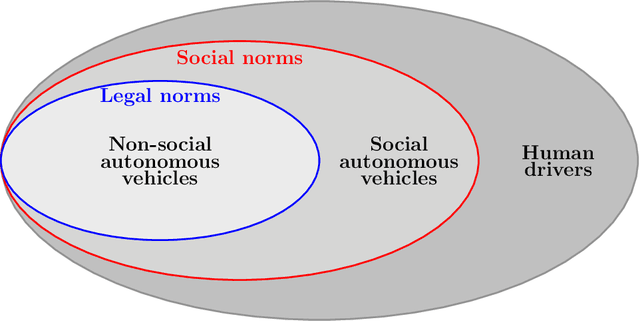
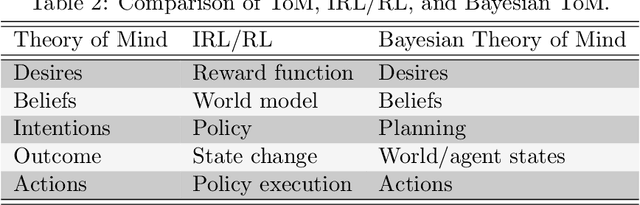
No human drives a car in a vacuum; she/he must negotiate with other road users to achieve their goals in social traffic scenes. A rational human driver can interact with other road users in a socially-compatible way through implicit communications to complete their driving tasks smoothly in interaction-intensive, safety-critical environments. This paper aims to review the existing approaches and theories to help understand and rethink the interactions among human drivers toward social autonomous driving. We take this survey to seek the answers to a series of fundamental questions: 1) What is social interaction in road traffic scenes? 2) How to measure and evaluate social interaction? 3) How to model and reveal the process of social interaction? 4) How do human drivers reach an implicit agreement and negotiate smoothly in social interaction? This paper reviews various approaches to modeling and learning the social interactions between human drivers, ranging from optimization theory and graphical models to social force theory and behavioral & cognitive science. We also highlight some new directions, critical challenges, and opening questions for future research.
Learning Symbolic Operators: A Neurosymbolic Solution for Autonomous Disassembly of Electric Vehicle Battery
Jun 07, 2022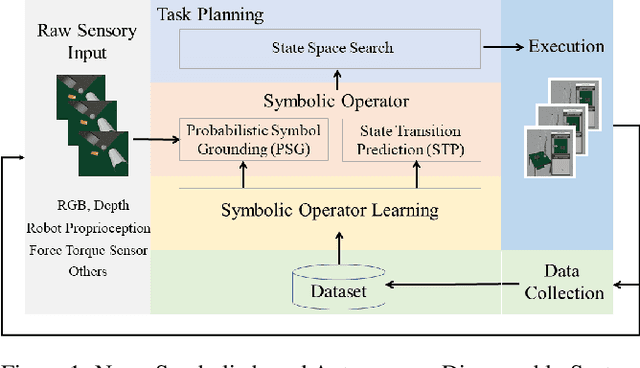
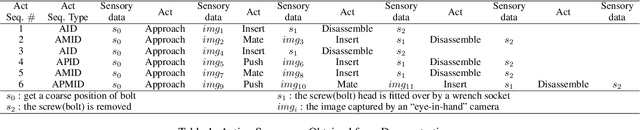
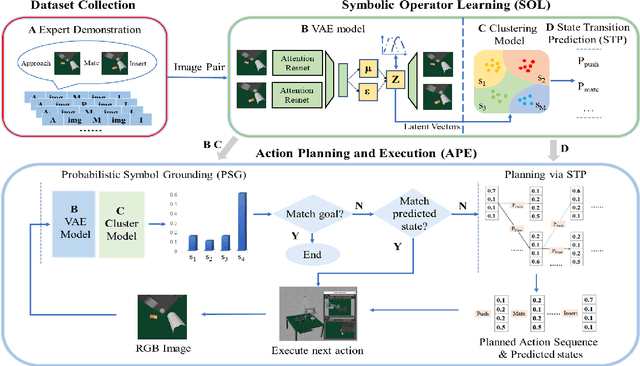
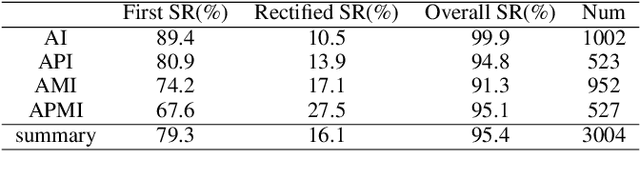
The booming of electric vehicles demands efficient battery disassembly for recycling to be environment-friendly. Currently, battery disassembly is still primarily done by humans, probably assisted by robots, due to the unstructured environment and high uncertainties. It is highly desirable to design autonomous solutions to improve work efficiency and lower human risks in high voltage and toxic environments. This paper proposes a novel neurosymbolic method, which augments the traditional Variational Autoencoder (VAE) model to learn symbolic operators based on raw sensory inputs and their relationships. The symbolic operators include a probabilistic state symbol grounding model and a state transition matrix for predicting states after each execution to enable autonomous task and motion planning. At last, the method's feasibility is verified through test results.
Computer Vision for Road Imaging and Pothole Detection: A State-of-the-Art Review of Systems and Algorithms
Apr 28, 2022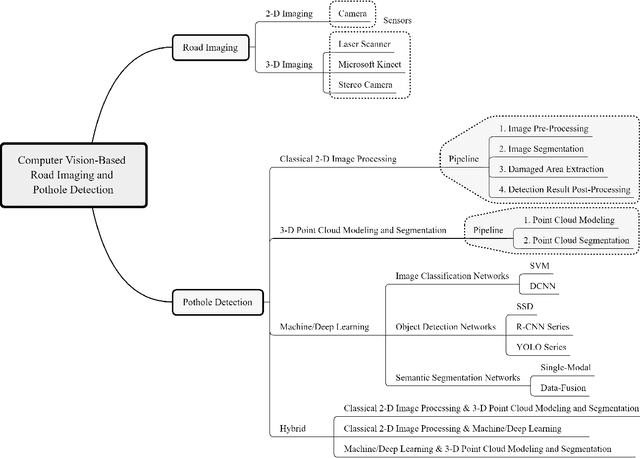
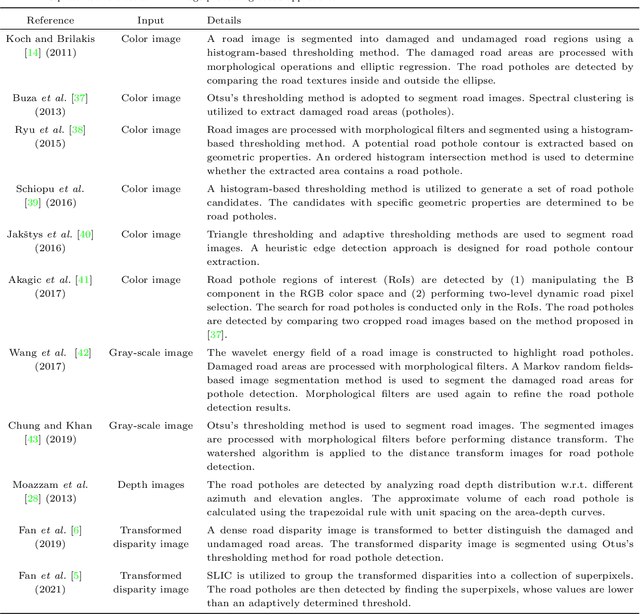

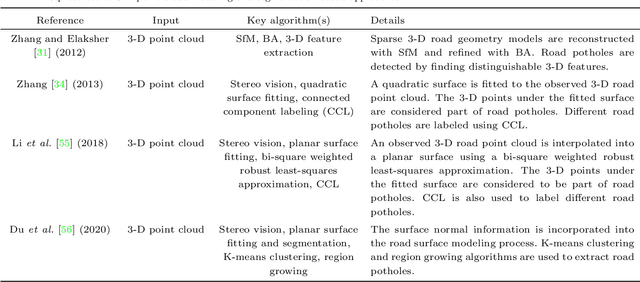
Computer vision algorithms have been prevalently utilized for 3-D road imaging and pothole detection for over two decades. Nonetheless, there is a lack of systematic survey articles on state-of-the-art (SoTA) computer vision techniques, especially deep learning models, developed to tackle these problems. This article first introduces the sensing systems employed for 2-D and 3-D road data acquisition, including camera(s), laser scanners, and Microsoft Kinect. Afterward, it thoroughly and comprehensively reviews the SoTA computer vision algorithms, including (1) classical 2-D image processing, (2) 3-D point cloud modeling and segmentation, and (3) machine/deep learning, developed for road pothole detection. This article also discusses the existing challenges and future development trends of computer vision-based road pothole detection approaches: classical 2-D image processing-based and 3-D point cloud modeling and segmentation-based approaches have already become history; and Convolutional neural networks (CNNs) have demonstrated compelling road pothole detection results and are promising to break the bottleneck with the future advances in self/un-supervised learning for multi-modal semantic segmentation. We believe that this survey can serve as practical guidance for developing the next-generation road condition assessment systems.
Tea: Program Repair Using Neural Network Based on Program Information Attention Matrix
Jul 17, 2021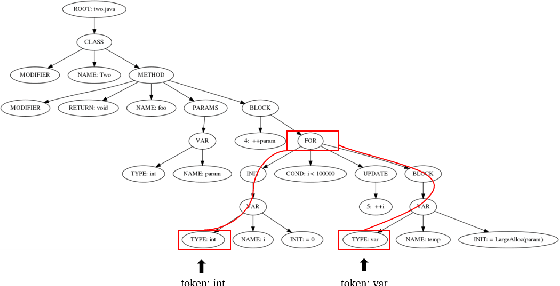
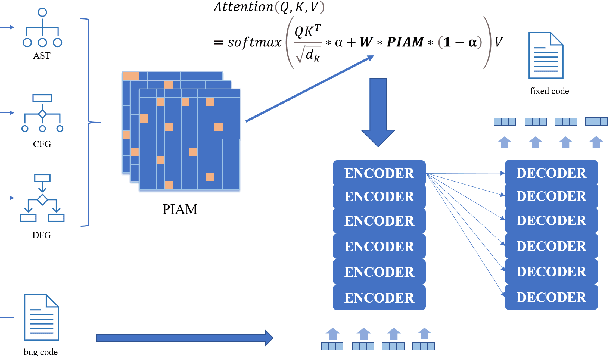
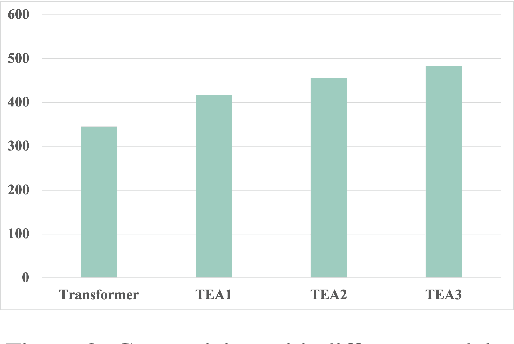
The advance in machine learning (ML)-driven natural language process (NLP) points a promising direction for automatic bug fixing for software programs, as fixing a buggy program can be transformed to a translation task. While software programs contain much richer information than one-dimensional natural language documents, pioneering work on using ML-driven NLP techniques for automatic program repair only considered a limited set of such information. We hypothesize that more comprehensive information of software programs, if appropriately utilized, can improve the effectiveness of ML-driven NLP approaches in repairing software programs. As the first step towards proving this hypothesis, we propose a unified representation to capture the syntax, data flow, and control flow aspects of software programs, and devise a method to use such a representation to guide the transformer model from NLP in better understanding and fixing buggy programs. Our preliminary experiment confirms that the more comprehensive information of software programs used, the better ML-driven NLP techniques can perform in fixing bugs in these programs.