 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAndroidLens: Long-latency Evaluation with Nested Sub-targets for Android GUI Agents
Dec 24, 2025Graphical user interface (GUI) agents can substantially improve productivity by automating frequently executed long-latency tasks on mobile devices. However, existing evaluation benchmarks are still constrained to limited applications, simple tasks, and coarse-grained metrics. To address this, we introduce AndroidLens, a challenging evaluation framework for mobile GUI agents, comprising 571 long-latency tasks in both Chinese and English environments, each requiring an average of more than 26 steps to complete. The framework features: (1) tasks derived from real-world user scenarios across 38 domains, covering complex types such as multi-constraint, multi-goal, and domain-specific tasks; (2) static evaluation that preserves real-world anomalies and allows multiple valid paths to reduce bias; and (3) dynamic evaluation that employs a milestone-based scheme for fine-grained progress measurement via Average Task Progress (ATP). Our evaluation indicates that even the best models reach only a 12.7% task success rate and 50.47% ATP. We also underscore key challenges in real-world environments, including environmental anomalies, adaptive exploration, and long-term memory retention.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025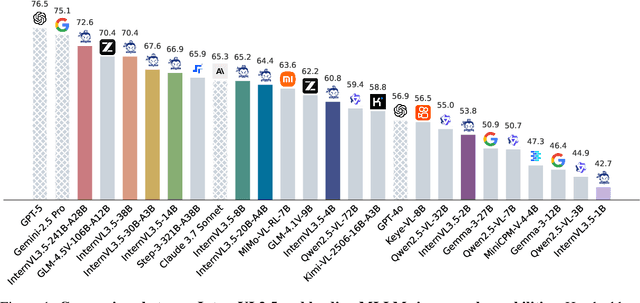
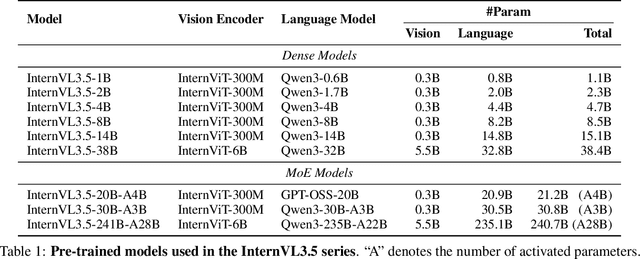
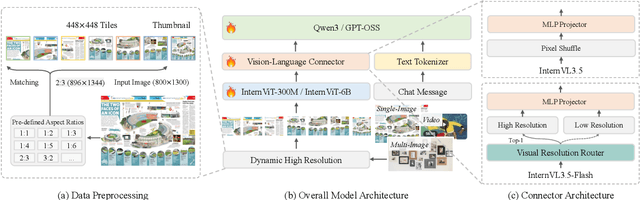
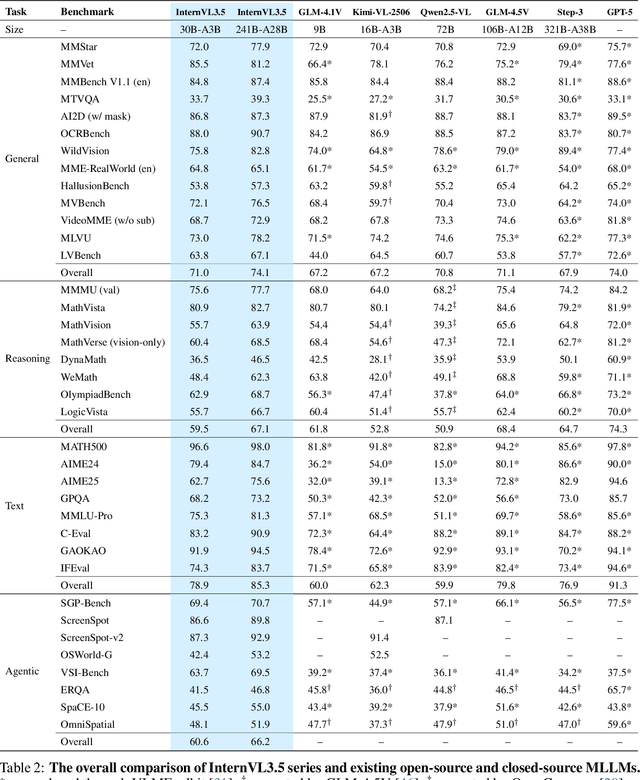
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
CorrMoE: Mixture of Experts with De-stylization Learning for Cross-Scene and Cross-Domain Correspondence Pruning
Jul 16, 2025Establishing reliable correspondences between image pairs is a fundamental task in computer vision, underpinning applications such as 3D reconstruction and visual localization. Although recent methods have made progress in pruning outliers from dense correspondence sets, they often hypothesize consistent visual domains and overlook the challenges posed by diverse scene structures. In this paper, we propose CorrMoE, a novel correspondence pruning framework that enhances robustness under cross-domain and cross-scene variations. To address domain shift, we introduce a De-stylization Dual Branch, performing style mixing on both implicit and explicit graph features to mitigate the adverse influence of domain-specific representations. For scene diversity, we design a Bi-Fusion Mixture of Experts module that adaptively integrates multi-perspective features through linear-complexity attention and dynamic expert routing. Extensive experiments on benchmark datasets demonstrate that CorrMoE achieves superior accuracy and generalization compared to state-of-the-art methods. The code and pre-trained models are available at https://github.com/peiwenxia/CorrMoE.
Bridging Perspectives: A Survey on Cross-view Collaborative Intelligence with Egocentric-Exocentric Vision
Jun 06, 2025



Perceiving the world from both egocentric (first-person) and exocentric (third-person) perspectives is fundamental to human cognition, enabling rich and complementary understanding of dynamic environments. In recent years, allowing the machines to leverage the synergistic potential of these dual perspectives has emerged as a compelling research direction in video understanding. In this survey, we provide a comprehensive review of video understanding from both exocentric and egocentric viewpoints. We begin by highlighting the practical applications of integrating egocentric and exocentric techniques, envisioning their potential collaboration across domains. We then identify key research tasks to realize these applications. Next, we systematically organize and review recent advancements into three main research directions: (1) leveraging egocentric data to enhance exocentric understanding, (2) utilizing exocentric data to improve egocentric analysis, and (3) joint learning frameworks that unify both perspectives. For each direction, we analyze a diverse set of tasks and relevant works. Additionally, we discuss benchmark datasets that support research in both perspectives, evaluating their scope, diversity, and applicability. Finally, we discuss limitations in current works and propose promising future research directions. By synthesizing insights from both perspectives, our goal is to inspire advancements in video understanding and artificial intelligence, bringing machines closer to perceiving the world in a human-like manner. A GitHub repo of related works can be found at https://github.com/ayiyayi/Awesome-Egocentric-and-Exocentric-Vision.
AV-Reasoner: Improving and Benchmarking Clue-Grounded Audio-Visual Counting for MLLMs
Jun 05, 2025Despite progress in video understanding, current MLLMs struggle with counting tasks. Existing benchmarks are limited by short videos, close-set queries, lack of clue annotations, and weak multimodal coverage. In this paper, we introduce CG-AV-Counting, a manually-annotated clue-grounded counting benchmark with 1,027 multimodal questions and 5,845 annotated clues over 497 long videos. It supports both black-box and white-box evaluation, serving as a comprehensive testbed for both end-to-end and reasoning-based counting. To explore ways to improve model's counting capability, we propose AV-Reasoner, a model trained with GRPO and curriculum learning to generalize counting ability from related tasks. AV-Reasoner achieves state-of-the-art results across multiple benchmarks, demonstrating the effectiveness of reinforcement learning. However, experiments show that on out-of-domain benchmarks, reasoning in the language space fails to bring performance gains. The code and benchmark have been realeased on https://av-reasoner.github.io.
Eagle 2.5: Boosting Long-Context Post-Training for Frontier Vision-Language Models
Apr 21, 2025We introduce Eagle 2.5, a family of frontier vision-language models (VLMs) for long-context multimodal learning. Our work addresses the challenges in long video comprehension and high-resolution image understanding, introducing a generalist framework for both tasks. The proposed training framework incorporates Automatic Degrade Sampling and Image Area Preservation, two techniques that preserve contextual integrity and visual details. The framework also includes numerous efficiency optimizations in the pipeline for long-context data training. Finally, we propose Eagle-Video-110K, a novel dataset that integrates both story-level and clip-level annotations, facilitating long-video understanding. Eagle 2.5 demonstrates substantial improvements on long-context multimodal benchmarks, providing a robust solution to the limitations of existing VLMs. Notably, our best model Eagle 2.5-8B achieves 72.4% on Video-MME with 512 input frames, matching the results of top-tier commercial model such as GPT-4o and large-scale open-source models like Qwen2.5-VL-72B and InternVL2.5-78B.
InternVL3: Exploring Advanced Training and Test-Time Recipes for Open-Source Multimodal Models
Apr 15, 2025We introduce InternVL3, a significant advancement in the InternVL series featuring a native multimodal pre-training paradigm. Rather than adapting a text-only large language model (LLM) into a multimodal large language model (MLLM) that supports visual inputs, InternVL3 jointly acquires multimodal and linguistic capabilities from both diverse multimodal data and pure-text corpora during a single pre-training stage. This unified training paradigm effectively addresses the complexities and alignment challenges commonly encountered in conventional post-hoc training pipelines for MLLMs. To further improve performance and scalability, InternVL3 incorporates variable visual position encoding (V2PE) to support extended multimodal contexts, employs advanced post-training techniques such as supervised fine-tuning (SFT) and mixed preference optimization (MPO), and adopts test-time scaling strategies alongside an optimized training infrastructure. Extensive empirical evaluations demonstrate that InternVL3 delivers superior performance across a wide range of multi-modal tasks. In particular, InternVL3-78B achieves a score of 72.2 on the MMMU benchmark, setting a new state-of-the-art among open-source MLLMs. Its capabilities remain highly competitive with leading proprietary models, including ChatGPT-4o, Claude 3.5 Sonnet, and Gemini 2.5 Pro, while also maintaining strong pure-language proficiency. In pursuit of open-science principles, we will publicly release both the training data and model weights to foster further research and development in next-generation MLLMs.
CoGen: 3D Consistent Video Generation via Adaptive Conditioning for Autonomous Driving
Mar 28, 2025Recent progress in driving video generation has shown significant potential for enhancing self-driving systems by providing scalable and controllable training data. Although pretrained state-of-the-art generation models, guided by 2D layout conditions (e.g., HD maps and bounding boxes), can produce photorealistic driving videos, achieving controllable multi-view videos with high 3D consistency remains a major challenge. To tackle this, we introduce a novel spatial adaptive generation framework, CoGen, which leverages advances in 3D generation to improve performance in two key aspects: (i) To ensure 3D consistency, we first generate high-quality, controllable 3D conditions that capture the geometry of driving scenes. By replacing coarse 2D conditions with these fine-grained 3D representations, our approach significantly enhances the spatial consistency of the generated videos. (ii) Additionally, we introduce a consistency adapter module to strengthen the robustness of the model to multi-condition control. The results demonstrate that this method excels in preserving geometric fidelity and visual realism, offering a reliable video generation solution for autonomous driving.
ImagineMap: Enhanced HD Map Construction with SD Maps
Dec 22, 2024Track Mapless demands models to process multi-view images and Standard-Definition (SD) maps, outputting lane and traffic element perceptions along with their topological relationships. We propose a novel architecture that integrates SD map priors to improve lane line and area detection performance. Inspired by TopoMLP, our model employs a two-stage structure: perception and reasoning. The downstream topology head uses the output from the upstream detection head, meaning accuracy improvements in detection significantly boost downstream performance.
CG-Bench: Clue-grounded Question Answering Benchmark for Long Video Understanding
Dec 16, 2024



Most existing video understanding benchmarks for multimodal large language models (MLLMs) focus only on short videos. The limited number of benchmarks for long video understanding often rely solely on multiple-choice questions (MCQs). However, because of the inherent limitation of MCQ-based evaluation and the increasing reasoning ability of MLLMs, models can give the current answer purely by combining short video understanding with elimination, without genuinely understanding the video content. To address this gap, we introduce CG-Bench, a novel benchmark designed for clue-grounded question answering in long videos. CG-Bench emphasizes the model's ability to retrieve relevant clues for questions, enhancing evaluation credibility. It features 1,219 manually curated videos categorized by a granular system with 14 primary categories, 171 secondary categories, and 638 tertiary categories, making it the largest benchmark for long video analysis. The benchmark includes 12,129 QA pairs in three major question types: perception, reasoning, and hallucination. Compensating the drawbacks of pure MCQ-based evaluation, we design two novel clue-based evaluation methods: clue-grounded white box and black box evaluations, to assess whether the model generates answers based on the correct understanding of the video. We evaluate multiple closed-source and open-source MLLMs on CG-Bench. Results indicate that current models significantly underperform in understanding long videos compared to short ones, and a significant gap exists between open-source and commercial models. We hope CG-Bench can advance the development of more trustworthy and capable MLLMs for long video understanding. All annotations and video data are released at https://cg-bench.github.io/leaderboard/.