 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoparsing: Diagram Parsing for Plane and Solid Geometry with a Unified Formal Language
Apr 13, 2026Multimodal Large Language Models (MLLMs) have achieved remarkable progress but continue to struggle with geometric reasoning, primarily due to the perception bottleneck regarding fine-grained visual elements. While formal languages have aided plane geometry understanding, solid geometry which requires spatial understanding remains largely unexplored. In this paper, we address this challenge by designing a unified formal language that integrates plane and solid geometry, comprehensively covering geometric structures and semantic relations. We construct GDP-29K, a large-scale dataset comprising 20k plane and 9k solid geometry samples collected from diverse real-world sources, each paired with its ground-truth formal description. To ensure syntactic correctness and geometric consistency, we propose a training paradigm that combines Supervised Fine-Tuning with Reinforcement Learning via Verifiable Rewards. Experiments show that our approach achieves state-of-the-art parsing performance. Furthermore, we demonstrate that our parsed formal descriptions serve as a critical cognitive scaffold, significantly boosting MLLMs' capabilities for downstream geometry reasoning tasks. Our data and code are available at Geoparsing.
SecAgent: Efficient Mobile GUI Agent with Semantic Context
Mar 09, 2026Mobile Graphical User Interface (GUI) agents powered by multimodal large language models have demonstrated promising capabilities in automating complex smartphone tasks. However, existing approaches face two critical limitations: the scarcity of high-quality multilingual datasets, particularly for non-English ecosystems, and inefficient history representation methods. To address these challenges, we present SecAgent, an efficient mobile GUI agent at 3B scale. We first construct a human-verified Chinese mobile GUI dataset with 18k grounding samples and 121k navigation steps across 44 applications, along with a Chinese navigation benchmark featuring multi-choice action annotations. Building upon this dataset, we propose a semantic context mechanism that distills history screenshots and actions into concise, natural language summaries, significantly reducing computational costs while preserving task-relevant information. Through supervised and reinforcement fine-tuning, SecAgent outperforms similar-scale baselines and achieves performance comparable to 7B-8B models on our and public navigation benchmarks. We will open-source the training dataset, benchmark, model, and code to advance research in multilingual mobile GUI automation.
How Foundational Skills Influence VLM-based Embodied Agents:A Native Perspective
Feb 24, 2026Recent advances in vision-language models (VLMs) have shown promise for human-level embodied intelligence. However, existing benchmarks for VLM-driven embodied agents often rely on high-level commands or discretized action spaces, which are non-native settings that differ markedly from real-world control. In addition, current benchmarks focus primarily on high-level tasks and lack joint evaluation and analysis at both low and high levels. To address these limitations, we present NativeEmbodied, a challenging benchmark for VLM-driven embodied agents that uses a unified, native low-level action space. Built on diverse simulated scenes, NativeEmbodied includes three representative high-level tasks in complex scenarios to evaluate overall performance. For more detailed analysis, we further decouple the skills required by complex tasks and construct four types of low-level tasks, each targeting a fundamental embodied skill. This joint evaluation across task and skill granularities enables fine-grained assessment of embodied agents. Experiments with state-of-the-art VLMs reveal clear deficiencies in several fundamental embodied skills, and further analysis shows that these bottlenecks significantly limit performance on high-level tasks. NativeEmbodied highlights key challenges for current VLM-driven embodied agents and provides insights to guide future research.
AndroidLens: Long-latency Evaluation with Nested Sub-targets for Android GUI Agents
Dec 24, 2025Graphical user interface (GUI) agents can substantially improve productivity by automating frequently executed long-latency tasks on mobile devices. However, existing evaluation benchmarks are still constrained to limited applications, simple tasks, and coarse-grained metrics. To address this, we introduce AndroidLens, a challenging evaluation framework for mobile GUI agents, comprising 571 long-latency tasks in both Chinese and English environments, each requiring an average of more than 26 steps to complete. The framework features: (1) tasks derived from real-world user scenarios across 38 domains, covering complex types such as multi-constraint, multi-goal, and domain-specific tasks; (2) static evaluation that preserves real-world anomalies and allows multiple valid paths to reduce bias; and (3) dynamic evaluation that employs a milestone-based scheme for fine-grained progress measurement via Average Task Progress (ATP). Our evaluation indicates that even the best models reach only a 12.7% task success rate and 50.47% ATP. We also underscore key challenges in real-world environments, including environmental anomalies, adaptive exploration, and long-term memory retention.
InquireMobile: Teaching VLM-based Mobile Agent to Request Human Assistance via Reinforcement Fine-Tuning
Aug 27, 2025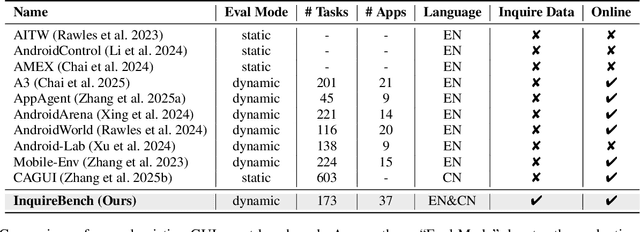
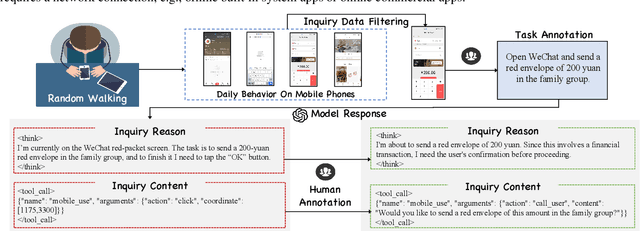

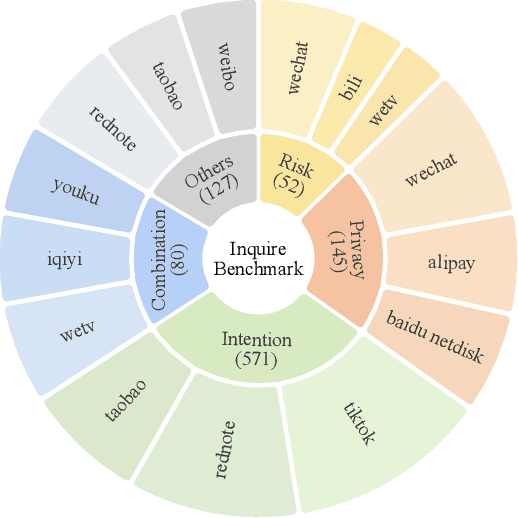
Recent advances in Vision-Language Models (VLMs) have enabled mobile agents to perceive and interact with real-world mobile environments based on human instructions. However, the current fully autonomous paradigm poses potential safety risks when model understanding or reasoning capabilities are insufficient. To address this challenge, we first introduce \textbf{InquireBench}, a comprehensive benchmark specifically designed to evaluate mobile agents' capabilities in safe interaction and proactive inquiry with users, encompassing 5 categories and 22 sub-categories, where most existing VLM-based agents demonstrate near-zero performance. In this paper, we aim to develop an interactive system that actively seeks human confirmation at critical decision points. To achieve this, we propose \textbf{InquireMobile}, a novel model inspired by reinforcement learning, featuring a two-stage training strategy and an interactive pre-action reasoning mechanism. Finally, our model achieves an 46.8% improvement in inquiry success rate and the best overall success rate among existing baselines on InquireBench. We will open-source all datasets, models, and evaluation codes to facilitate development in both academia and industry.
DeepPHY: Benchmarking Agentic VLMs on Physical Reasoning
Aug 07, 2025Although Vision Language Models (VLMs) exhibit strong perceptual abilities and impressive visual reasoning, they struggle with attention to detail and precise action planning in complex, dynamic environments, leading to subpar performance. Real-world tasks typically require complex interactions, advanced spatial reasoning, long-term planning, and continuous strategy refinement, usually necessitating understanding the physics rules of the target scenario. However, evaluating these capabilities in real-world scenarios is often prohibitively expensive. To bridge this gap, we introduce DeepPHY, a novel benchmark framework designed to systematically evaluate VLMs' understanding and reasoning about fundamental physical principles through a series of challenging simulated environments. DeepPHY integrates multiple physical reasoning environments of varying difficulty levels and incorporates fine-grained evaluation metrics. Our evaluation finds that even state-of-the-art VLMs struggle to translate descriptive physical knowledge into precise, predictive control.
CombatVLA: An Efficient Vision-Language-Action Model for Combat Tasks in 3D Action Role-Playing Games
Mar 12, 2025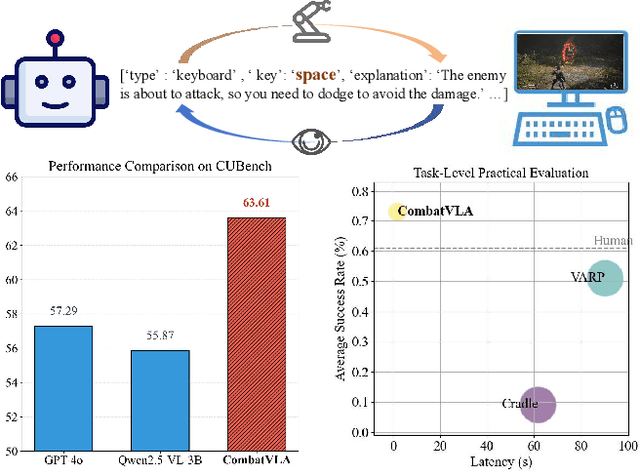
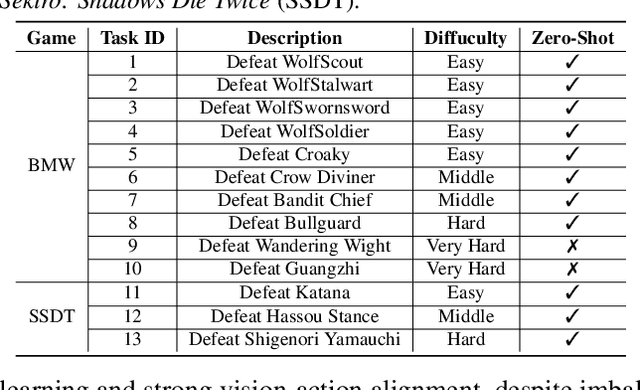
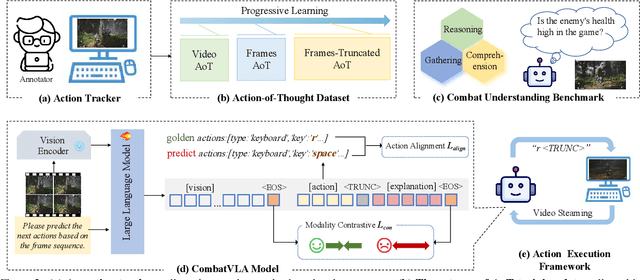
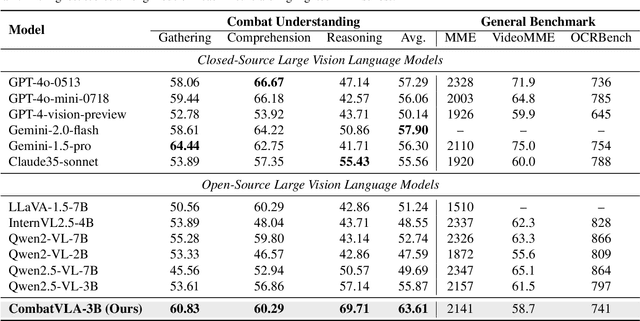
Recent advances in Vision-Language-Action models (VLAs) have expanded the capabilities of embodied intelligence. However, significant challenges remain in real-time decision-making in complex 3D environments, which demand second-level responses, high-resolution perception, and tactical reasoning under dynamic conditions. To advance the field, we introduce CombatVLA, an efficient VLA model optimized for combat tasks in 3D action role-playing games(ARPGs). Specifically, our CombatVLA is a 3B model trained on video-action pairs collected by an action tracker, where the data is formatted as action-of-thought (AoT) sequences. Thereafter, CombatVLA seamlessly integrates into an action execution framework, allowing efficient inference through our truncated AoT strategy. Experimental results demonstrate that CombatVLA not only outperforms all existing models on the combat understanding benchmark but also achieves a 50-fold acceleration in game combat. Moreover, it has a higher task success rate than human players. We will open-source all resources, including the action tracker, dataset, benchmark, model weights, training code, and the implementation of the framework at https://combatvla.github.io/.
ChineseSimpleVQA -- "See the World, Discover Knowledge": A Chinese Factuality Evaluation for Large Vision Language Models
Feb 19, 2025The evaluation of factual accuracy in large vision language models (LVLMs) has lagged behind their rapid development, making it challenging to fully reflect these models' knowledge capacity and reliability. In this paper, we introduce the first factuality-based visual question-answering benchmark in Chinese, named ChineseSimpleVQA, aimed at assessing the visual factuality of LVLMs across 8 major topics and 56 subtopics. The key features of this benchmark include a focus on the Chinese language, diverse knowledge types, a multi-hop question construction, high-quality data, static consistency, and easy-to-evaluate through short answers. Moreover, we contribute a rigorous data construction pipeline and decouple the visual factuality into two parts: seeing the world (i.e., object recognition) and discovering knowledge. This decoupling allows us to analyze the capability boundaries and execution mechanisms of LVLMs. Subsequently, we evaluate 34 advanced open-source and closed-source models, revealing critical performance gaps within this field.
LongDocURL: a Comprehensive Multimodal Long Document Benchmark Integrating Understanding, Reasoning, and Locating
Dec 24, 2024Large vision language models (LVLMs) have improved the document understanding capabilities remarkably, enabling the handling of complex document elements, longer contexts, and a wider range of tasks. However, existing document understanding benchmarks have been limited to handling only a small number of pages and fail to provide a comprehensive analysis of layout elements locating. In this paper, we first define three primary task categories: Long Document Understanding, numerical Reasoning, and cross-element Locating, and then propose a comprehensive benchmark, LongDocURL, integrating above three primary tasks and comprising 20 sub-tasks categorized based on different primary tasks and answer evidences. Furthermore, we develop a semi-automated construction pipeline and collect 2,325 high-quality question-answering pairs, covering more than 33,000 pages of documents, significantly outperforming existing benchmarks. Subsequently, we conduct comprehensive evaluation experiments on both open-source and closed-source models across 26 different configurations, revealing critical performance gaps in this field.
Token Preference Optimization with Self-Calibrated Visual-Anchored Rewards for Hallucination Mitigation
Dec 19, 2024Direct Preference Optimization (DPO) has been demonstrated to be highly effective in mitigating hallucinations in Large Vision Language Models (LVLMs) by aligning their outputs more closely with human preferences. Despite the recent progress, existing methods suffer from two drawbacks: 1) Lack of scalable token-level rewards; and 2) Neglect of visual-anchored tokens. To this end, we propose a novel Token Preference Optimization model with self-calibrated rewards (dubbed as TPO), which adaptively attends to visual-correlated tokens without fine-grained annotations. Specifically, we introduce a token-level \emph{visual-anchored} \emph{reward} as the difference of the logistic distributions of generated tokens conditioned on the raw image and the corrupted one. In addition, to highlight the informative visual-anchored tokens, a visual-aware training objective is proposed to enhance more accurate token-level optimization. Extensive experimental results have manifested the state-of-the-art performance of the proposed TPO. For example, by building on top of LLAVA-1.5-7B, our TPO boosts the performance absolute improvement for hallucination benchmarks.