 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROAMER: Robust Offroad Autonomy using Multimodal State Estimation with Radar Velocity Integration
Jan 30, 2024Reliable offroad autonomy requires low-latency, high-accuracy state estimates of pose as well as velocity, which remain viable throughout environments with sub-optimal operating conditions for the utilized perception modalities. As state estimation remains a single point of failure system in the majority of aspiring autonomous systems, failing to address the environmental degradation the perception sensors could potentially experience given the operating conditions, can be a mission-critical shortcoming. In this work, a method for integration of radar velocity information in a LiDAR-inertial odometry solution is proposed, enabling consistent estimation performance even with degraded LiDAR-inertial odometry. The proposed method utilizes the direct velocity-measuring capabilities of an Frequency Modulated Continuous Wave (FMCW) radar sensor to enhance the LiDAR-inertial smoother solution onboard the vehicle through integration of the forward velocity measurement into the graph-based smoother. This leads to increased robustness in the overall estimation solution, even in the absence of LiDAR data. This method was validated by hardware experiments conducted onboard an all-terrain vehicle traveling at high speed, ~12 m/s, in demanding offroad environments.
Pixel to Elevation: Learning to Predict Elevation Maps at Long Range using Images for Autonomous Offroad Navigation
Jan 30, 2024Understanding terrain topology at long-range is crucial for the success of off-road robotic missions, especially when navigating at high-speeds. LiDAR sensors, which are currently heavily relied upon for geometric mapping, provide sparse measurements when mapping at greater distances. To address this challenge, we present a novel learning-based approach capable of predicting terrain elevation maps at long-range using only onboard egocentric images in real-time. Our proposed method is comprised of three main elements. First, a transformer-based encoder is introduced that learns cross-view associations between the egocentric views and prior bird-eye-view elevation map predictions. Second, an orientation-aware positional encoding is proposed to incorporate the 3D vehicle pose information over complex unstructured terrain with multi-view visual image features. Lastly, a history-augmented learn-able map embedding is proposed to achieve better temporal consistency between elevation map predictions to facilitate the downstream navigational tasks. We experimentally validate the applicability of our proposed approach for autonomous offroad robotic navigation in complex and unstructured terrain using real-world offroad driving data. Furthermore, the method is qualitatively and quantitatively compared against the current state-of-the-art methods. Extensive field experiments demonstrate that our method surpasses baseline models in accurately predicting terrain elevation while effectively capturing the overall terrain topology at long-ranges. Finally, ablation studies are conducted to highlight and understand the effect of key components of the proposed approach and validate their suitability to improve offroad robotic navigation capabilities.
LunarNav: Crater-based Localization for Long-range Autonomous Lunar Rover Navigation
Jan 03, 2023



The Artemis program requires robotic and crewed lunar rovers for resource prospecting and exploitation, construction and maintenance of facilities, and human exploration. These rovers must support navigation for 10s of kilometers (km) from base camps. A lunar science rover mission concept - Endurance-A, has been recommended by the new Decadal Survey as the highest priority medium-class mission of the Lunar Discovery and Exploration Program, and would be required to traverse approximately 2000 km in the South Pole-Aitkin (SPA) Basin, with individual drives of several kilometers between stops for downlink. These rover mission scenarios require functionality that provides onboard, autonomous, global position knowledge ( aka absolute localization). However, planetary rovers have no onboard global localization capability to date; they have only used relative localization, by integrating combinations of wheel odometry, visual odometry, and inertial measurements during each drive to track position relative to the start of each drive. In this work, we summarize recent developments from the LunarNav project, where we have developed algorithms and software to enable lunar rovers to estimate their global position and heading on the Moon with a goal performance of position error less than 5 meters (m) and heading error less than 3-degree, 3-sigma, in sunlit areas. This will be achieved autonomously onboard by detecting craters in the vicinity of the rover and matching them to a database of known craters mapped from orbit. The overall technical framework consists of three main elements: 1) crater detection, 2) crater matching, and 3) state estimation. In previous work, we developed crater detection algorithms for three different sensing modalities. Our results suggest that rover localization with an error less than 5 m is highly probable during daytime operations.
X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments
Nov 30, 2022



Modern robotic systems are required to operate in challenging environments, which demand reliable localization under challenging conditions. LiDAR-based localization methods, such as the Iterative Closest Point (ICP) algorithm, can suffer in geometrically uninformative environments that are known to deteriorate registration performance and push optimization toward divergence along weakly constrained directions. To overcome this issue, this work proposes i) a robust multi-category (non-)localizability detection module, and ii) a localizability-aware constrained ICP optimization module and couples both in a unified manner. The proposed localizability detection is achieved by utilizing the correspondences between the scan and the map to analyze the alignment strength against the principal directions of the optimization as part of its multi-category LiDAR localizability analysis. In the second part, this localizability analysis is then tightly integrated into the scan-to-map point cloud registration to generate drift-free pose updates along well-constrained directions. The proposed method is thoroughly evaluated and compared to state-of-the-art methods in simulation and during real-world experiments, underlying the gain in performance and reliability in LiDAR-challenging scenarios. In all experiments, the proposed framework demonstrates accurate and generalizable localizability detection and robust pose estimation without environment-specific parameter tuning.
A Framework for Collaborative Multi-Robot Mapping using Spectral Graph Wavelets
Nov 02, 2022The exploration of large-scale unknown environments can benefit from the deployment of multiple robots for collaborative mapping. Each robot explores a section of the environment and communicates onboard pose estimates and maps to a central server to build an optimized global multi-robot map. Naturally, inconsistencies can arise between onboard and server estimates due to onboard odometry drift, failures, or degeneracies. The mapping server can correct and overcome such failure cases using computationally expensive operations such as inter-robot loop closure detection and multi-modal mapping. However, the individual robots do not benefit from the collaborative map if the mapping server provides no feedback. Although server updates from the multi-robot map can greatly alleviate the robotic mission strategically, most existing work lacks them, due to their associated computational and bandwidth-related costs. Motivated by this challenge, this paper proposes a novel collaborative mapping framework that enables global mapping consistency among robots and the mapping server. In particular, we propose graph spectral analysis, at different spatial scales, to detect structural differences between robot and server graphs, and to generate necessary constraints for the individual robot pose graphs. Our approach specifically finds the nodes that correspond to the drift's origin rather than the nodes where the error becomes too large. We thoroughly analyze and validate our proposed framework using several real-world multi-robot field deployments where we show improvements of the onboard system up to 90\% and can recover the onboard estimation from localization failures and even from the degeneracies within its estimation.
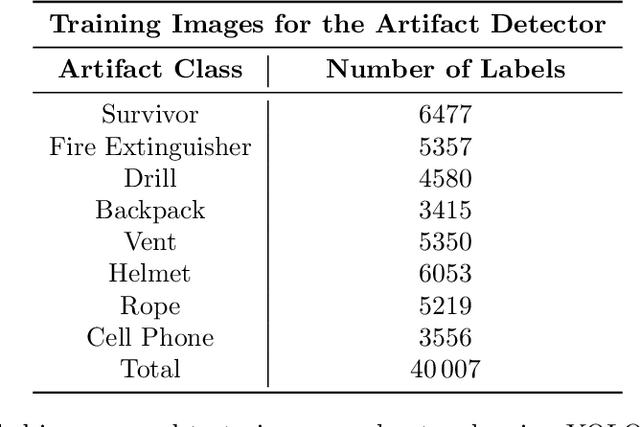
LiDAR-guided object search and detection in Subterranean Environments
Oct 26, 2022



Detecting objects of interest, such as human survivors, safety equipment, and structure access points, is critical to any search-and-rescue operation. Robots deployed for such time-sensitive efforts rely on their onboard sensors to perform their designated tasks. However, as disaster response operations are predominantly conducted under perceptually degraded conditions, commonly utilized sensors such as visual cameras and LiDARs suffer in terms of performance degradation. In response, this work presents a method that utilizes the complementary nature of vision and depth sensors to leverage multi-modal information to aid object detection at longer distances. In particular, depth and intensity values from sparse LiDAR returns are used to generate proposals for objects present in the environment. These proposals are then utilized by a Pan-Tilt-Zoom (PTZ) camera system to perform a directed search by adjusting its pose and zoom level for performing object detection and classification in difficult environments. The proposed work has been thoroughly verified using an ANYmal quadruped robot in underground settings and on datasets collected during the DARPA Subterranean Challenge finals.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022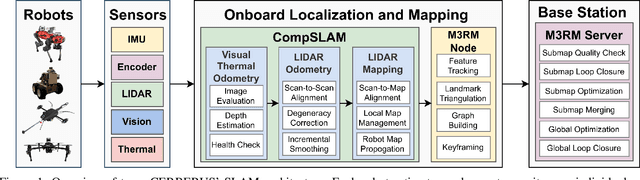
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
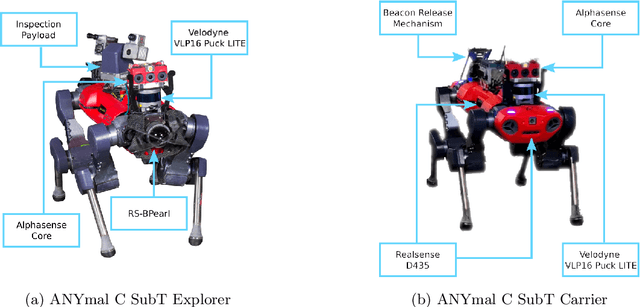
Marsupial Walking-and-Flying Robotic Deployment for Collaborative Exploration of Unknown Environments
May 11, 2022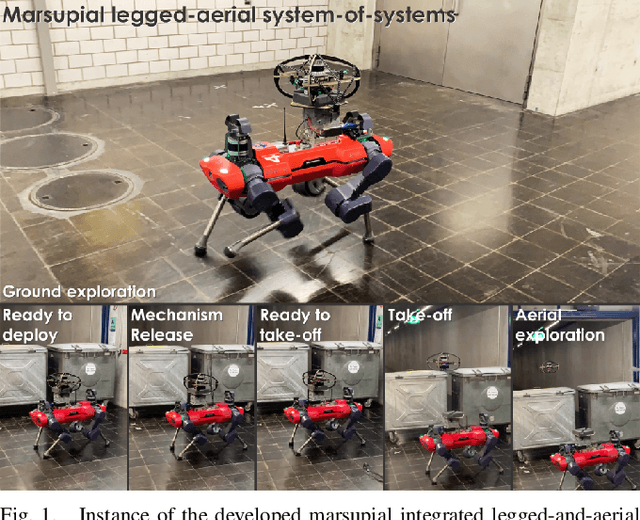
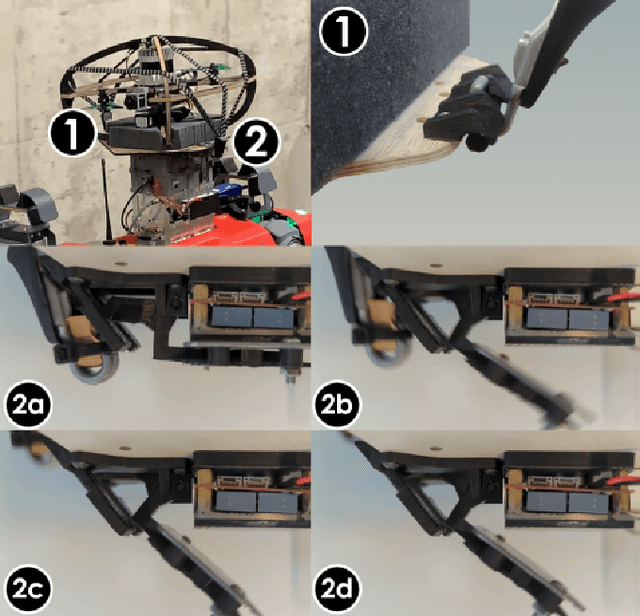
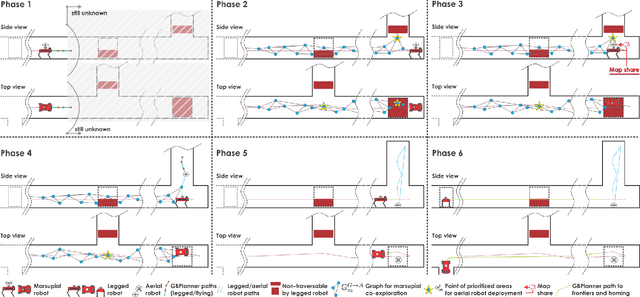
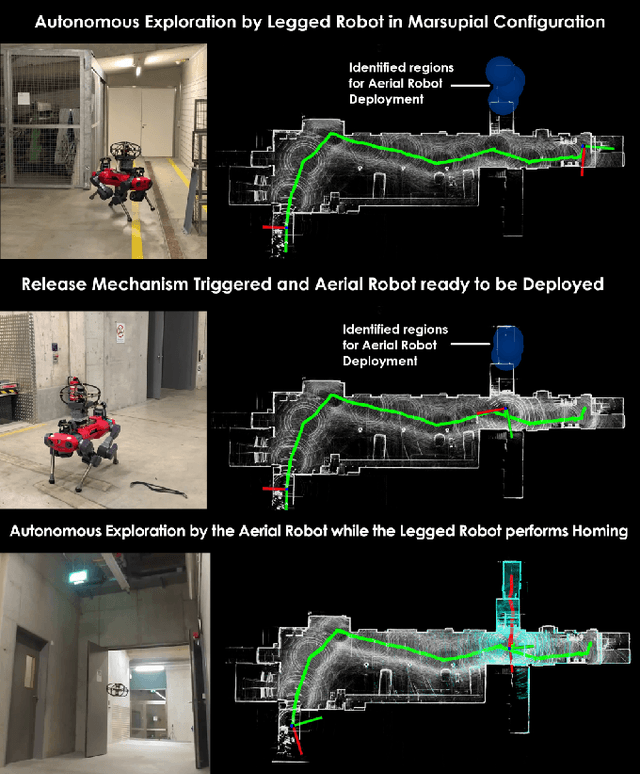
This work contributes a marsupial robotic system-of-systems involving a legged and an aerial robot capable of collaborative mapping and exploration path planning that exploits the heterogeneous properties of the two systems and the ability to selectively deploy the aerial system from the ground robot. Exploiting the dexterous locomotion capabilities and long endurance of quadruped robots, the marsupial combination can explore within large-scale and confined environments involving rough terrain. However, as certain types of terrain or vertical geometries can render any ground system unable to continue its exploration, the marsupial system can - when needed - deploy the flying robot which, by exploiting its 3D navigation capabilities, can undertake a focused exploration task within its endurance limitations. Focusing on autonomy, the two systems can co-localize and map together by sharing LiDAR-based maps and plan exploration paths individually, while a tailored graph search onboard the legged robot allows it to identify where and when the ferried aerial platform should be deployed. The system is verified within multiple experimental studies demonstrating the expanded exploration capabilities of the marsupial system-of-systems and facilitating the exploration of otherwise individually unreachable areas.
Locomotion Policy Guided Traversability Learning using Volumetric Representations of Complex Environments
Mar 29, 2022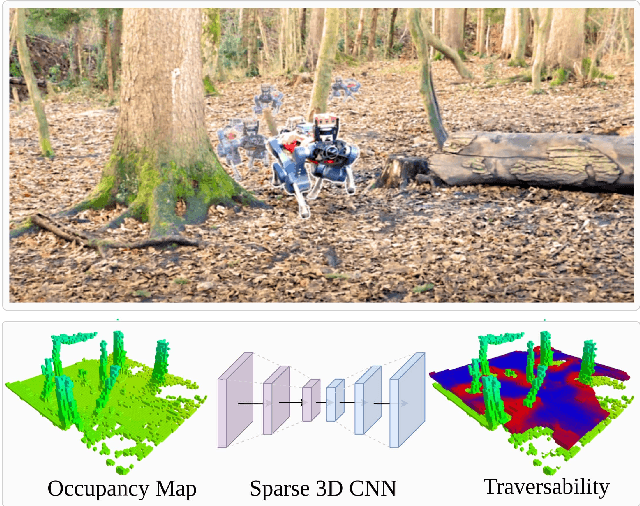

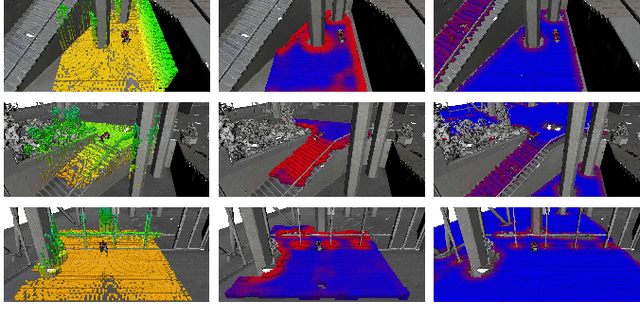
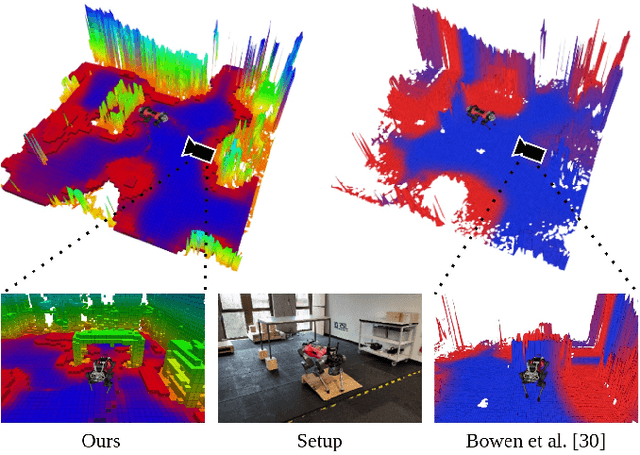
Despite the progress in legged robotic locomotion, autonomous navigation in unknown environments remains an open problem. Ideally, the navigation system utilizes the full potential of the robots' locomotion capabilities while operating within safety limits under uncertainty. The robot must sense and analyze the traversability of the surrounding terrain, which depends on the hardware, locomotion control, and terrain properties. It may contain information about the risk, energy, or time consumption needed to traverse the terrain. To avoid hand-crafted traversability cost functions we propose to collect traversability information about the robot and locomotion policy by simulating the traversal over randomly generated terrains using a physics simulator. Thousand of robots are simulated in parallel controlled by the same locomotion policy used in reality to acquire 57 years of real-world locomotion experience equivalent. For deployment on the real robot, a sparse convolutional network is trained to predict the simulated traversability cost, which is tailored to the deployed locomotion policy, from an entirely geometric representation of the environment in the form of a 3D voxel-occupancy map. This representation avoids the need for commonly used elevation maps, which are error-prone in the presence of overhanging obstacles and multi-floor or low-ceiling scenarios. The effectiveness of the proposed traversability prediction network is demonstrated for path planning for the legged robot ANYmal in various indoor and natural environments.