 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin Catalog: A Large-Scale Photorealistic 3D Object Digital Twin Dataset
Apr 11, 2025



We introduce Digital Twin Catalog (DTC), a new large-scale photorealistic 3D object digital twin dataset. A digital twin of a 3D object is a highly detailed, virtually indistinguishable representation of a physical object, accurately capturing its shape, appearance, physical properties, and other attributes. Recent advances in neural-based 3D reconstruction and inverse rendering have significantly improved the quality of 3D object reconstruction. Despite these advancements, there remains a lack of a large-scale, digital twin quality real-world dataset and benchmark that can quantitatively assess and compare the performance of different reconstruction methods, as well as improve reconstruction quality through training or fine-tuning. Moreover, to democratize 3D digital twin creation, it is essential to integrate creation techniques with next-generation egocentric computing platforms, such as AR glasses. Currently, there is no dataset available to evaluate 3D object reconstruction using egocentric captured images. To address these gaps, the DTC dataset features 2,000 scanned digital twin-quality 3D objects, along with image sequences captured under different lighting conditions using DSLR cameras and egocentric AR glasses. This dataset establishes the first comprehensive real-world evaluation benchmark for 3D digital twin creation tasks, offering a robust foundation for comparing and improving existing reconstruction methods. The DTC dataset is already released at https://www.projectaria.com/datasets/dtc/ and we will also make the baseline evaluations open-source.
Ego-Exo4D: Understanding Skilled Human Activity from First- and Third-Person Perspectives
Nov 30, 2023



We present Ego-Exo4D, a diverse, large-scale multimodal multiview video dataset and benchmark challenge. Ego-Exo4D centers around simultaneously-captured egocentric and exocentric video of skilled human activities (e.g., sports, music, dance, bike repair). More than 800 participants from 13 cities worldwide performed these activities in 131 different natural scene contexts, yielding long-form captures from 1 to 42 minutes each and 1,422 hours of video combined. The multimodal nature of the dataset is unprecedented: the video is accompanied by multichannel audio, eye gaze, 3D point clouds, camera poses, IMU, and multiple paired language descriptions -- including a novel "expert commentary" done by coaches and teachers and tailored to the skilled-activity domain. To push the frontier of first-person video understanding of skilled human activity, we also present a suite of benchmark tasks and their annotations, including fine-grained activity understanding, proficiency estimation, cross-view translation, and 3D hand/body pose. All resources will be open sourced to fuel new research in the community.
Project Aria: A New Tool for Egocentric Multi-Modal AI Research
Sep 12, 2023



Egocentric, multi-modal data as available on future augmented reality (AR) devices provides unique challenges and opportunities for machine perception. These future devices will need to be all-day wearable in a socially acceptable form-factor to support always available, context-aware and personalized AI applications. Our team at Meta Reality Labs Research built the Aria device, an egocentric, multi-modal data recording and streaming device with the goal to foster and accelerate research in this area. In this paper, we describe the Aria device hardware including its sensor configuration and the corresponding software tools that enable recording and processing of such data.
EgoBlur: Responsible Innovation in Aria
Sep 06, 2023



Project Aria pushes the frontiers of Egocentric AI with large-scale real-world data collection using purposely designed glasses with privacy first approach. To protect the privacy of bystanders being recorded by the glasses, our research protocols are designed to ensure recorded video is processed by an AI anonymization model that removes bystander faces and vehicle license plates. Detected face and license plate regions are processed with a Gaussian blur such that these personal identification information (PII) regions are obscured. This process helps to ensure that anonymized versions of the video is retained for research purposes. In Project Aria, we have developed a state-of-the-art anonymization system EgoBlur. In this paper, we present extensive analysis of EgoBlur on challenging datasets comparing its performance with other state-of-the-art systems from industry and academia including extensive Responsible AI analysis on recently released Casual Conversations V2 dataset.
Ego4D: Around the World in 3,000 Hours of Egocentric Video
Oct 13, 2021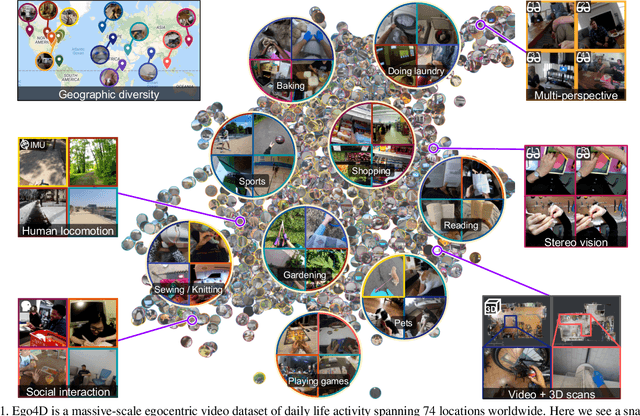
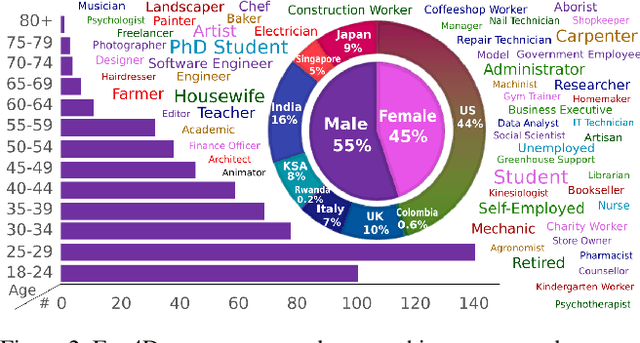
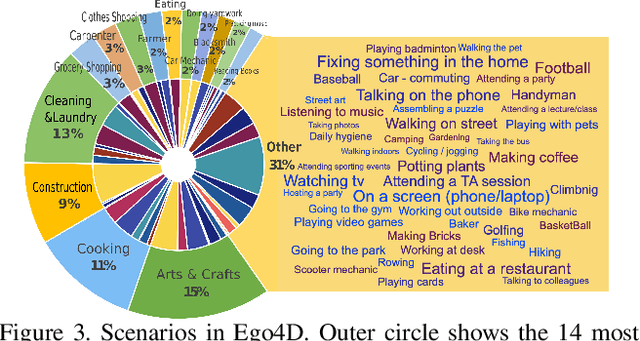
We introduce Ego4D, a massive-scale egocentric video dataset and benchmark suite. It offers 3,025 hours of daily-life activity video spanning hundreds of scenarios (household, outdoor, workplace, leisure, etc.) captured by 855 unique camera wearers from 74 worldwide locations and 9 different countries. The approach to collection is designed to uphold rigorous privacy and ethics standards with consenting participants and robust de-identification procedures where relevant. Ego4D dramatically expands the volume of diverse egocentric video footage publicly available to the research community. Portions of the video are accompanied by audio, 3D meshes of the environment, eye gaze, stereo, and/or synchronized videos from multiple egocentric cameras at the same event. Furthermore, we present a host of new benchmark challenges centered around understanding the first-person visual experience in the past (querying an episodic memory), present (analyzing hand-object manipulation, audio-visual conversation, and social interactions), and future (forecasting activities). By publicly sharing this massive annotated dataset and benchmark suite, we aim to push the frontier of first-person perception. Project page: https://ego4d-data.org/
The Replica Dataset: A Digital Replica of Indoor Spaces
Jun 13, 2019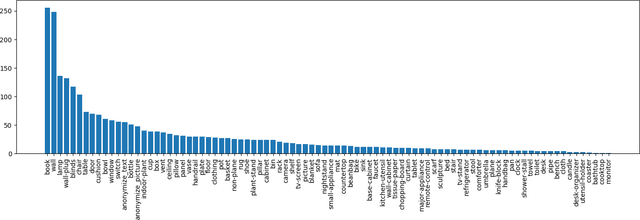
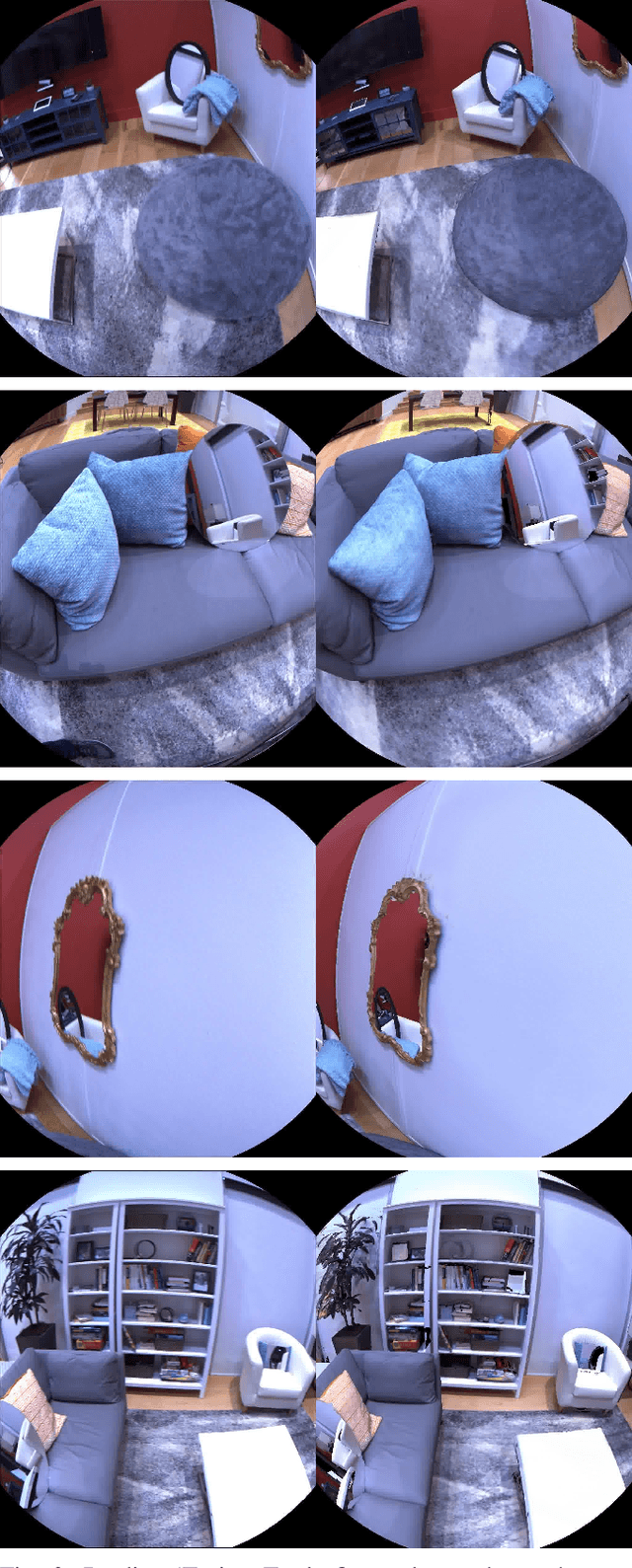
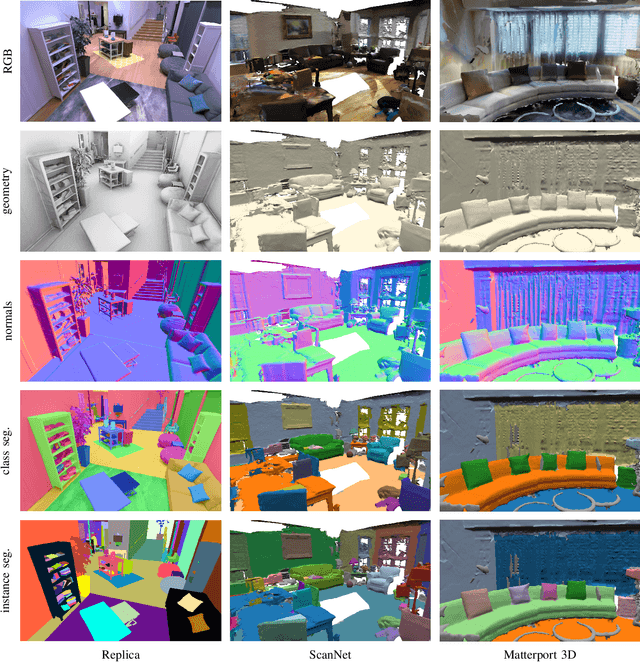
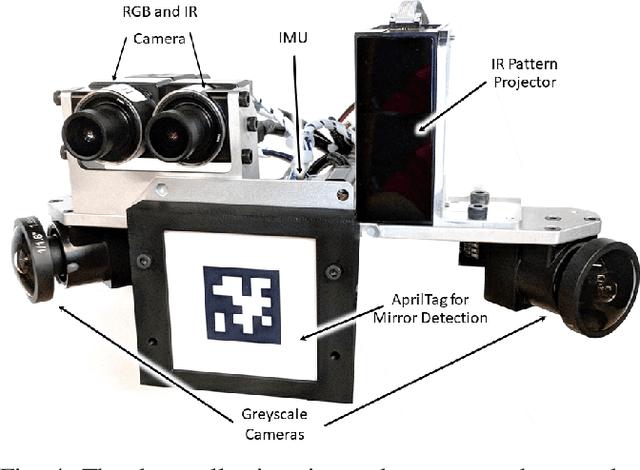
We introduce Replica, a dataset of 18 highly photo-realistic 3D indoor scene reconstructions at room and building scale. Each scene consists of a dense mesh, high-resolution high-dynamic-range (HDR) textures, per-primitive semantic class and instance information, and planar mirror and glass reflectors. The goal of Replica is to enable machine learning (ML) research that relies on visually, geometrically, and semantically realistic generative models of the world - for instance, egocentric computer vision, semantic segmentation in 2D and 3D, geometric inference, and the development of embodied agents (virtual robots) performing navigation, instruction following, and question answering. Due to the high level of realism of the renderings from Replica, there is hope that ML systems trained on Replica may transfer directly to real world image and video data. Together with the data, we are releasing a minimal C++ SDK as a starting point for working with the Replica dataset. In addition, Replica is `Habitat-compatible', i.e. can be natively used with AI Habitat for training and testing embodied agents.