 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Replica Dataset: A Digital Replica of Indoor Spaces
Jun 13, 2019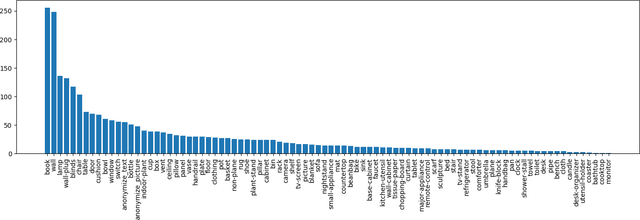
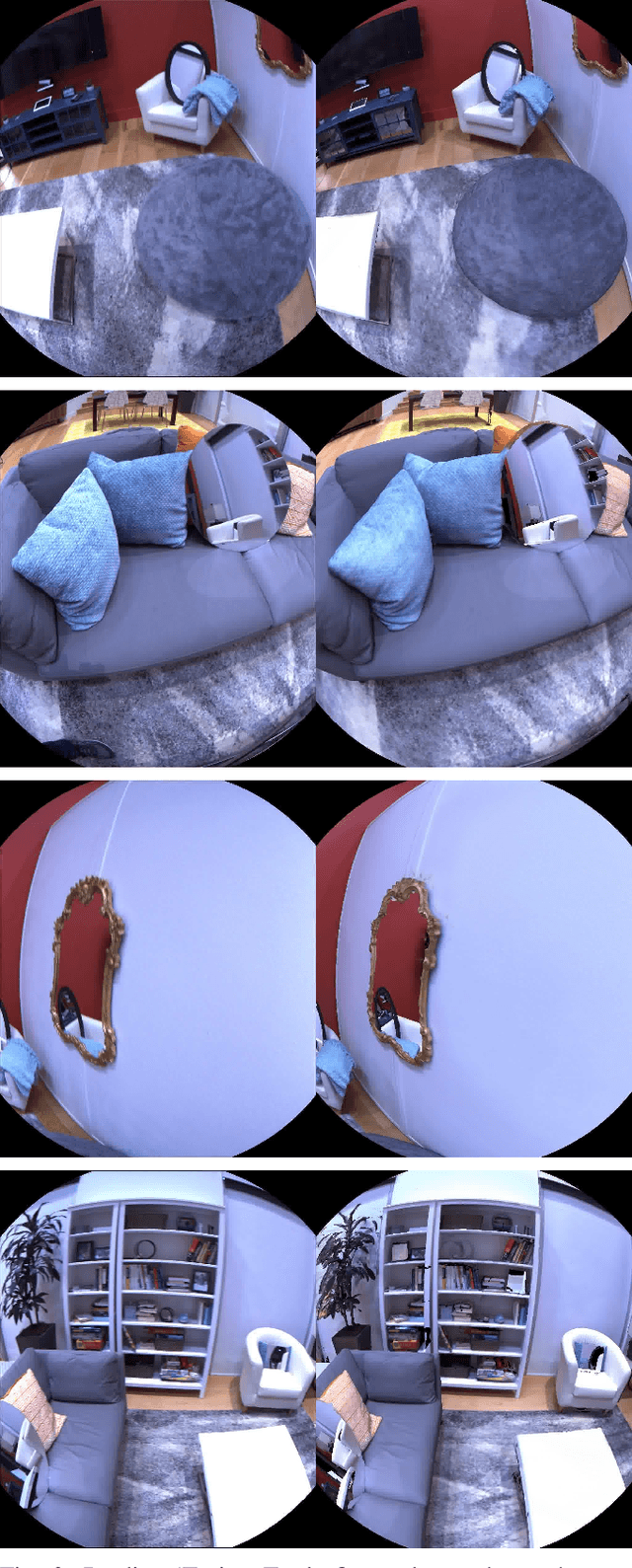
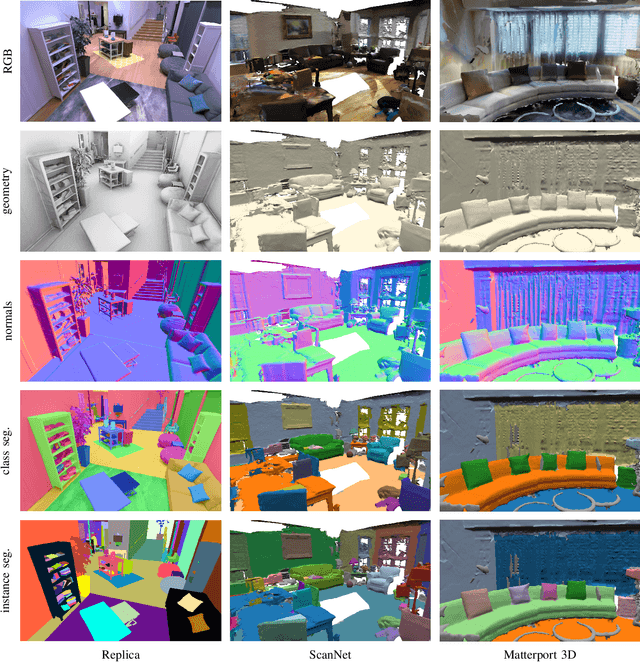
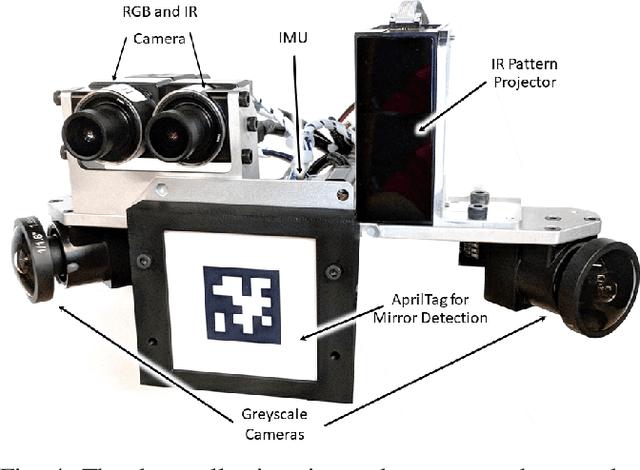
We introduce Replica, a dataset of 18 highly photo-realistic 3D indoor scene reconstructions at room and building scale. Each scene consists of a dense mesh, high-resolution high-dynamic-range (HDR) textures, per-primitive semantic class and instance information, and planar mirror and glass reflectors. The goal of Replica is to enable machine learning (ML) research that relies on visually, geometrically, and semantically realistic generative models of the world - for instance, egocentric computer vision, semantic segmentation in 2D and 3D, geometric inference, and the development of embodied agents (virtual robots) performing navigation, instruction following, and question answering. Due to the high level of realism of the renderings from Replica, there is hope that ML systems trained on Replica may transfer directly to real world image and video data. Together with the data, we are releasing a minimal C++ SDK as a starting point for working with the Replica dataset. In addition, Replica is `Habitat-compatible', i.e. can be natively used with AI Habitat for training and testing embodied agents.
ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras
Jun 19, 2017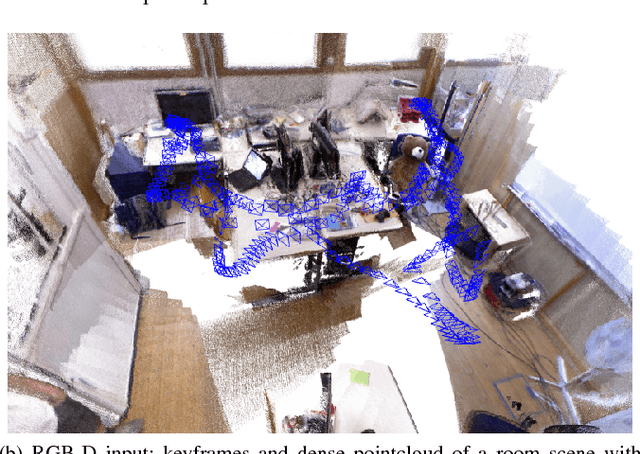
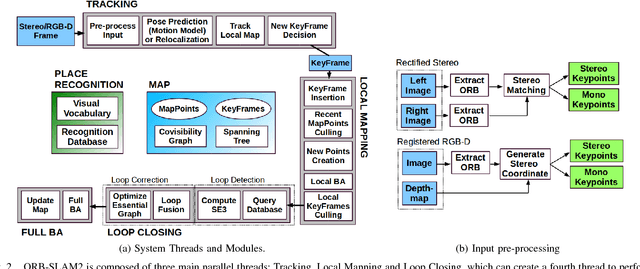
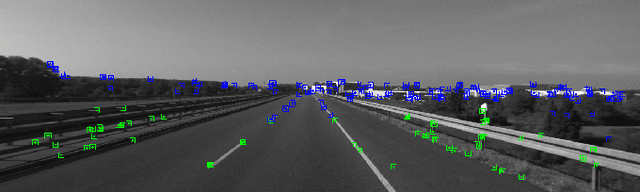
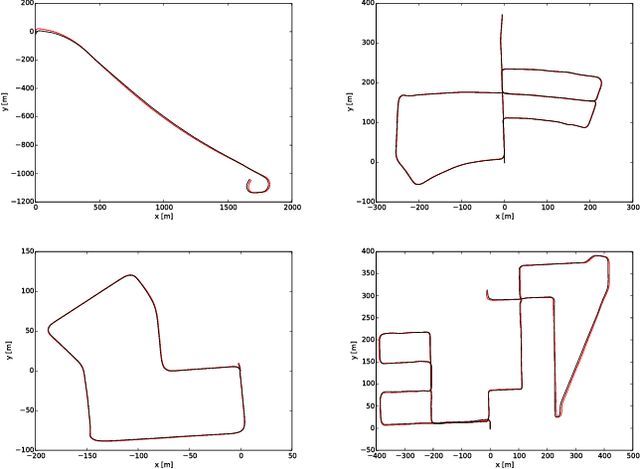
We present ORB-SLAM2 a complete SLAM system for monocular, stereo and RGB-D cameras, including map reuse, loop closing and relocalization capabilities. The system works in real-time on standard CPUs in a wide variety of environments from small hand-held indoors sequences, to drones flying in industrial environments and cars driving around a city. Our back-end based on bundle adjustment with monocular and stereo observations allows for accurate trajectory estimation with metric scale. Our system includes a lightweight localization mode that leverages visual odometry tracks for unmapped regions and matches to map points that allow for zero-drift localization. The evaluation on 29 popular public sequences shows that our method achieves state-of-the-art accuracy, being in most cases the most accurate SLAM solution. We publish the source code, not only for the benefit of the SLAM community, but with the aim of being an out-of-the-box SLAM solution for researchers in other fields.
Visual-Inertial Monocular SLAM with Map Reuse
Jan 17, 2017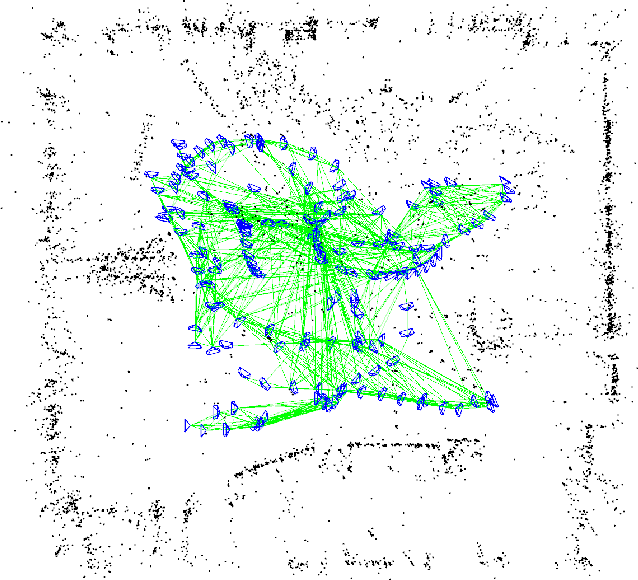
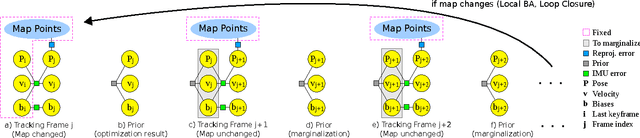
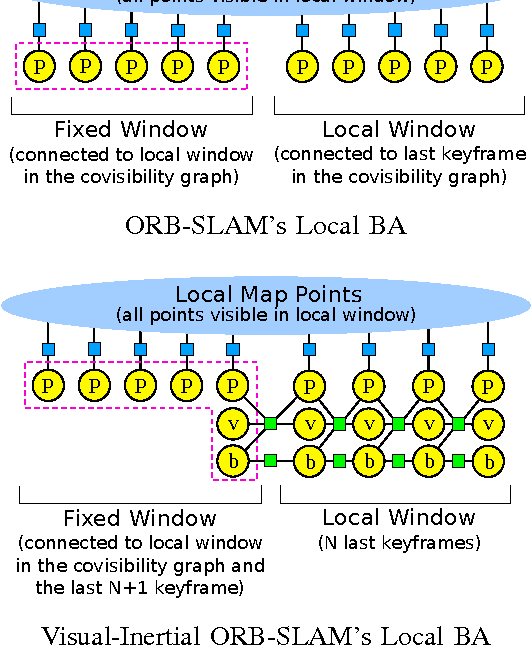
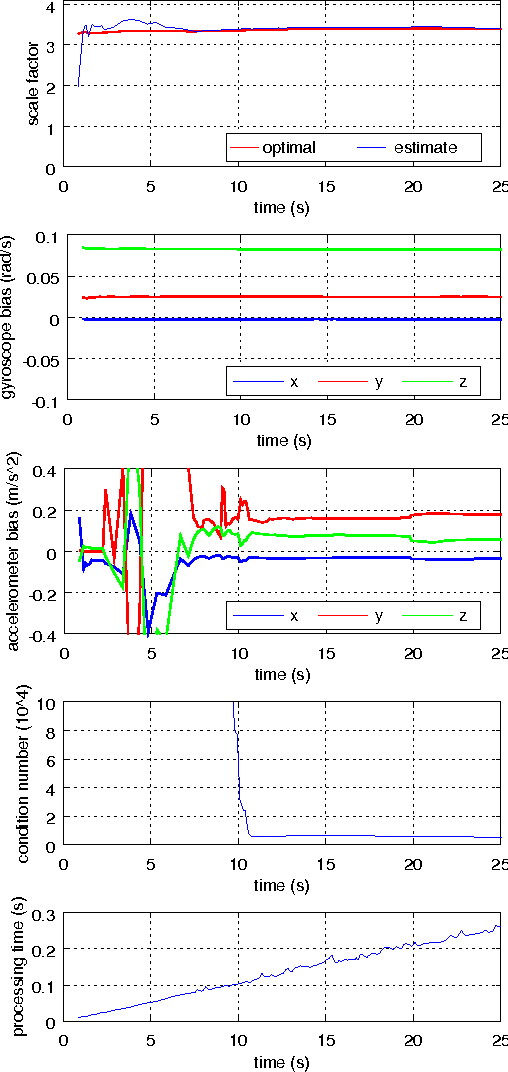
In recent years there have been excellent results in Visual-Inertial Odometry techniques, which aim to compute the incremental motion of the sensor with high accuracy and robustness. However these approaches lack the capability to close loops, and trajectory estimation accumulates drift even if the sensor is continually revisiting the same place. In this work we present a novel tightly-coupled Visual-Inertial Simultaneous Localization and Mapping system that is able to close loops and reuse its map to achieve zero-drift localization in already mapped areas. While our approach can be applied to any camera configuration, we address here the most general problem of a monocular camera, with its well-known scale ambiguity. We also propose a novel IMU initialization method, which computes the scale, the gravity direction, the velocity, and gyroscope and accelerometer biases, in a few seconds with high accuracy. We test our system in the 11 sequences of a recent micro-aerial vehicle public dataset achieving a typical scale factor error of 1% and centimeter precision. We compare to the state-of-the-art in visual-inertial odometry in sequences with revisiting, proving the better accuracy of our method due to map reuse and no drift accumulation.
ORB-SLAM: a Versatile and Accurate Monocular SLAM System
Sep 18, 2015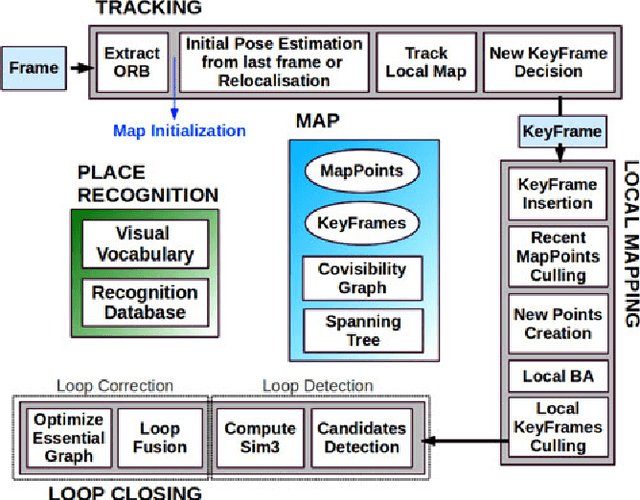
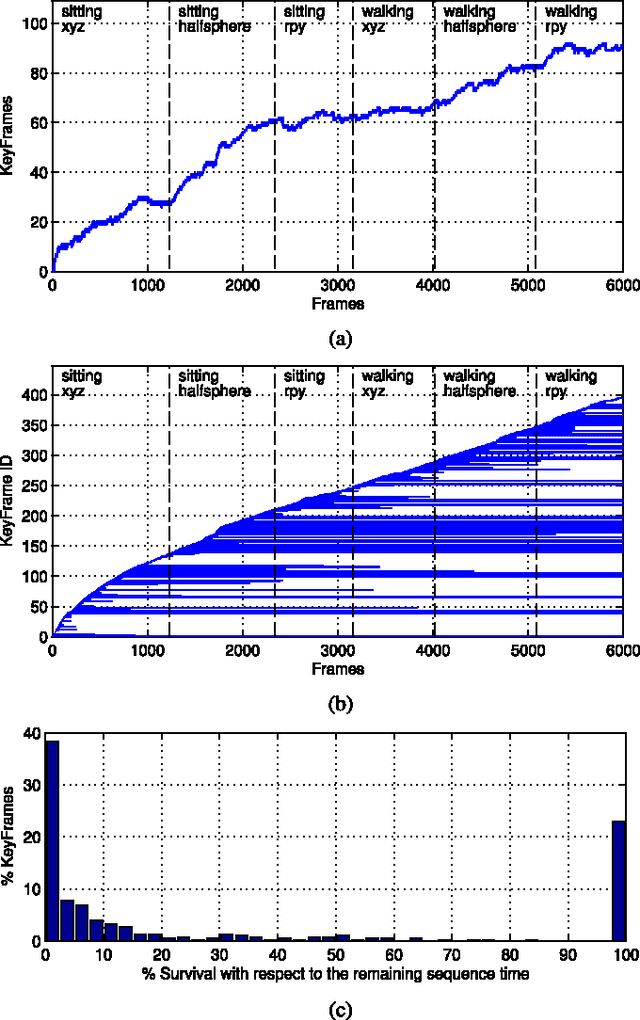
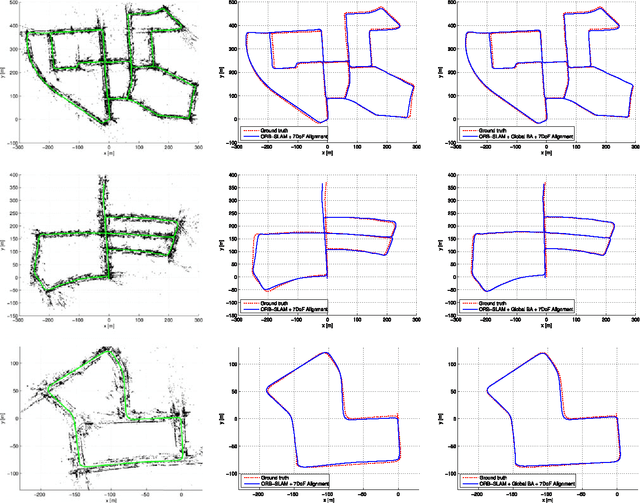
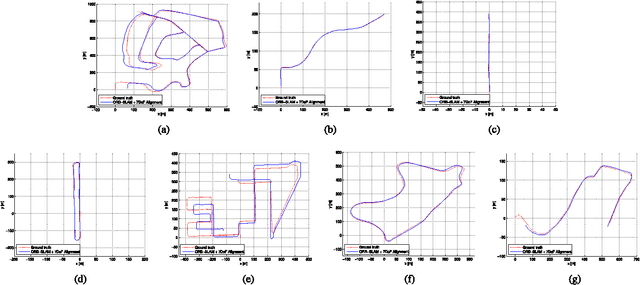
This paper presents ORB-SLAM, a feature-based monocular SLAM system that operates in real time, in small and large, indoor and outdoor environments. The system is robust to severe motion clutter, allows wide baseline loop closing and relocalization, and includes full automatic initialization. Building on excellent algorithms of recent years, we designed from scratch a novel system that uses the same features for all SLAM tasks: tracking, mapping, relocalization, and loop closing. A survival of the fittest strategy that selects the points and keyframes of the reconstruction leads to excellent robustness and generates a compact and trackable map that only grows if the scene content changes, allowing lifelong operation. We present an exhaustive evaluation in 27 sequences from the most popular datasets. ORB-SLAM achieves unprecedented performance with respect to other state-of-the-art monocular SLAM approaches. For the benefit of the community, we make the source code public.