 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstructing Objects along Hand Interaction Timelines in Egocentric Video
Dec 08, 2025We introduce the task of Reconstructing Objects along Hand Interaction Timelines (ROHIT). We first define the Hand Interaction Timeline (HIT) from a rigid object's perspective. In a HIT, an object is first static relative to the scene, then is held in hand following contact, where its pose changes. This is usually followed by a firm grip during use, before it is released to be static again w.r.t. to the scene. We model these pose constraints over the HIT, and propose to propagate the object's pose along the HIT enabling superior reconstruction using our proposed Constrained Optimisation and Propagation (COP) framework. Importantly, we focus on timelines with stable grasps - i.e. where the hand is stably holding an object, effectively maintaining constant contact during use. This allows us to efficiently annotate, study, and evaluate object reconstruction in videos without 3D ground truth. We evaluate our proposed task, ROHIT, over two egocentric datasets, HOT3D and in-the-wild EPIC-Kitchens. In HOT3D, we curate 1.2K clips of stable grasps. In EPIC-Kitchens, we annotate 2.4K clips of stable grasps including 390 object instances across 9 categories from videos of daily interactions in 141 environments. Without 3D ground truth, we utilise 2D projection error to assess the reconstruction. Quantitatively, COP improves stable grasp reconstruction by 6.2-11.3% and HIT reconstruction by up to 24.5% with constrained pose propagation.
HD-EPIC: A Highly-Detailed Egocentric Video Dataset
Feb 06, 2025
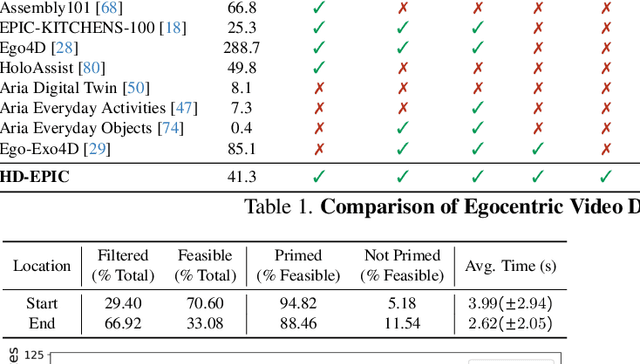


We present a validation dataset of newly-collected kitchen-based egocentric videos, manually annotated with highly detailed and interconnected ground-truth labels covering: recipe steps, fine-grained actions, ingredients with nutritional values, moving objects, and audio annotations. Importantly, all annotations are grounded in 3D through digital twinning of the scene, fixtures, object locations, and primed with gaze. Footage is collected from unscripted recordings in diverse home environments, making HDEPIC the first dataset collected in-the-wild but with detailed annotations matching those in controlled lab environments. We show the potential of our highly-detailed annotations through a challenging VQA benchmark of 26K questions assessing the capability to recognise recipes, ingredients, nutrition, fine-grained actions, 3D perception, object motion, and gaze direction. The powerful long-context Gemini Pro only achieves 38.5% on this benchmark, showcasing its difficulty and highlighting shortcomings in current VLMs. We additionally assess action recognition, sound recognition, and long-term video-object segmentation on HD-EPIC. HD-EPIC is 41 hours of video in 9 kitchens with digital twins of 413 kitchen fixtures, capturing 69 recipes, 59K fine-grained actions, 51K audio events, 20K object movements and 37K object masks lifted to 3D. On average, we have 263 annotations per minute of our unscripted videos.
HOI-Ref: Hand-Object Interaction Referral in Egocentric Vision
Apr 15, 2024



Large Vision Language Models (VLMs) are now the de facto state-of-the-art for a number of tasks including visual question answering, recognising objects, and spatial referral. In this work, we propose the HOI-Ref task for egocentric images that aims to understand interactions between hands and objects using VLMs. To enable HOI-Ref, we curate the HOI-QA dataset that consists of 3.9M question-answer pairs for training and evaluating VLMs. HOI-QA includes questions relating to locating hands, objects, and critically their interactions (e.g. referring to the object being manipulated by the hand). We train the first VLM for HOI-Ref on this dataset and call it VLM4HOI. Our results demonstrate that VLMs trained for referral on third person images fail to recognise and refer hands and objects in egocentric images. When fine-tuned on our egocentric HOI-QA dataset, performance improves by 27.9% for referring hands and objects, and by 26.7% for referring interactions.
Ego-Exo4D: Understanding Skilled Human Activity from First- and Third-Person Perspectives
Nov 30, 2023



We present Ego-Exo4D, a diverse, large-scale multimodal multiview video dataset and benchmark challenge. Ego-Exo4D centers around simultaneously-captured egocentric and exocentric video of skilled human activities (e.g., sports, music, dance, bike repair). More than 800 participants from 13 cities worldwide performed these activities in 131 different natural scene contexts, yielding long-form captures from 1 to 42 minutes each and 1,422 hours of video combined. The multimodal nature of the dataset is unprecedented: the video is accompanied by multichannel audio, eye gaze, 3D point clouds, camera poses, IMU, and multiple paired language descriptions -- including a novel "expert commentary" done by coaches and teachers and tailored to the skilled-activity domain. To push the frontier of first-person video understanding of skilled human activity, we also present a suite of benchmark tasks and their annotations, including fine-grained activity understanding, proficiency estimation, cross-view translation, and 3D hand/body pose. All resources will be open sourced to fuel new research in the community.
United We Stand, Divided We Fall: UnityGraph for Unsupervised Procedure Learning from Videos
Nov 06, 2023



Given multiple videos of the same task, procedure learning addresses identifying the key-steps and determining their order to perform the task. For this purpose, existing approaches use the signal generated from a pair of videos. This makes key-steps discovery challenging as the algorithms lack inter-videos perspective. Instead, we propose an unsupervised Graph-based Procedure Learning (GPL) framework. GPL consists of the novel UnityGraph that represents all the videos of a task as a graph to obtain both intra-video and inter-videos context. Further, to obtain similar embeddings for the same key-steps, the embeddings of UnityGraph are updated in an unsupervised manner using the Node2Vec algorithm. Finally, to identify the key-steps, we cluster the embeddings using KMeans. We test GPL on benchmark ProceL, CrossTask, and EgoProceL datasets and achieve an average improvement of 2% on third-person datasets and 3.6% on EgoProceL over the state-of-the-art.
An Outlook into the Future of Egocentric Vision
Aug 14, 2023



What will the future be? We wonder! In this survey, we explore the gap between current research in egocentric vision and the ever-anticipated future, where wearable computing, with outward facing cameras and digital overlays, is expected to be integrated in our every day lives. To understand this gap, the article starts by envisaging the future through character-based stories, showcasing through examples the limitations of current technology. We then provide a mapping between this future and previously defined research tasks. For each task, we survey its seminal works, current state-of-the-art methodologies and available datasets, then reflect on shortcomings that limit its applicability to future research. Note that this survey focuses on software models for egocentric vision, independent of any specific hardware. The paper concludes with recommendations for areas of immediate explorations so as to unlock our path to the future always-on, personalised and life-enhancing egocentric vision.
My View is the Best View: Procedure Learning from Egocentric Videos
Jul 22, 2022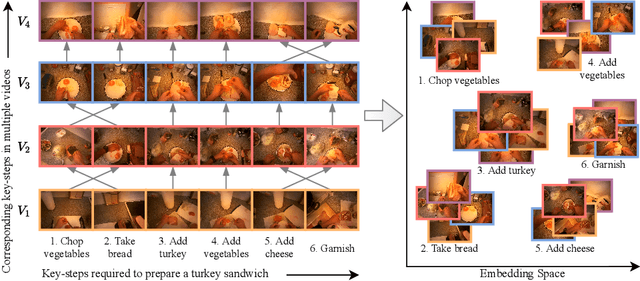

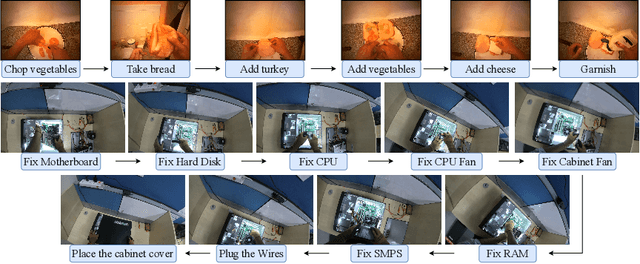
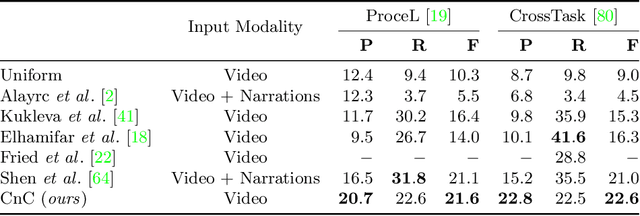
Procedure learning involves identifying the key-steps and determining their logical order to perform a task. Existing approaches commonly use third-person videos for learning the procedure, making the manipulated object small in appearance and often occluded by the actor, leading to significant errors. In contrast, we observe that videos obtained from first-person (egocentric) wearable cameras provide an unobstructed and clear view of the action. However, procedure learning from egocentric videos is challenging because (a) the camera view undergoes extreme changes due to the wearer's head motion, and (b) the presence of unrelated frames due to the unconstrained nature of the videos. Due to this, current state-of-the-art methods' assumptions that the actions occur at approximately the same time and are of the same duration, do not hold. Instead, we propose to use the signal provided by the temporal correspondences between key-steps across videos. To this end, we present a novel self-supervised Correspond and Cut (CnC) framework for procedure learning. CnC identifies and utilizes the temporal correspondences between the key-steps across multiple videos to learn the procedure. Our experiments show that CnC outperforms the state-of-the-art on the benchmark ProceL and CrossTask datasets by 5.2% and 6.3%, respectively. Furthermore, for procedure learning using egocentric videos, we propose the EgoProceL dataset consisting of 62 hours of videos captured by 130 subjects performing 16 tasks. The source code and the dataset are available on the project page https://sid2697.github.io/egoprocel/.
Ego4D: Around the World in 3,000 Hours of Egocentric Video
Oct 13, 2021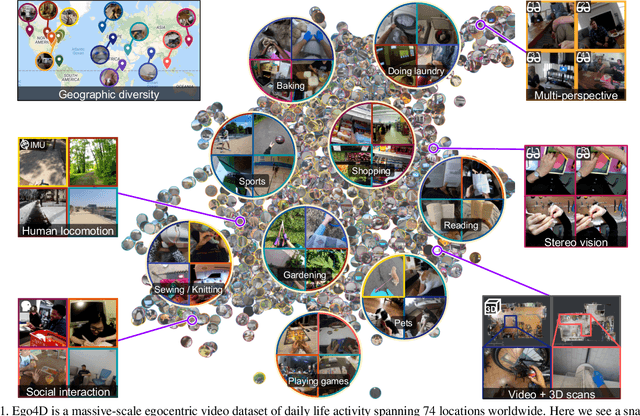
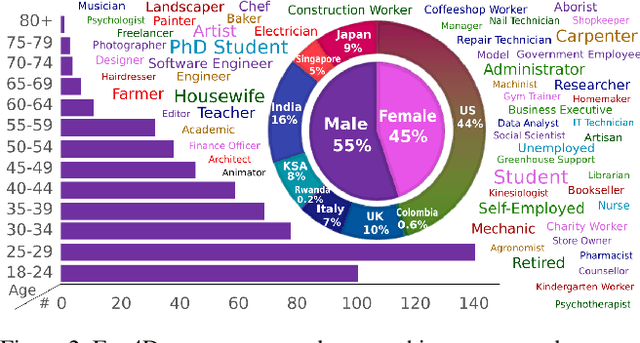
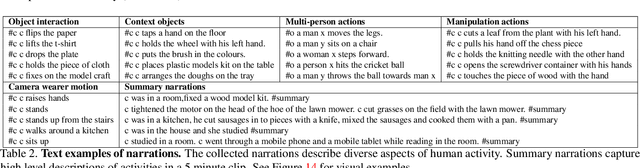
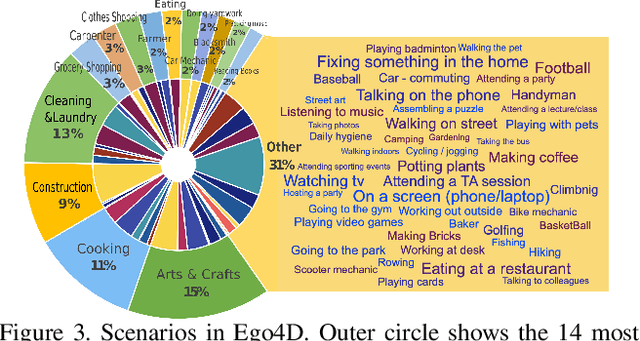
We introduce Ego4D, a massive-scale egocentric video dataset and benchmark suite. It offers 3,025 hours of daily-life activity video spanning hundreds of scenarios (household, outdoor, workplace, leisure, etc.) captured by 855 unique camera wearers from 74 worldwide locations and 9 different countries. The approach to collection is designed to uphold rigorous privacy and ethics standards with consenting participants and robust de-identification procedures where relevant. Ego4D dramatically expands the volume of diverse egocentric video footage publicly available to the research community. Portions of the video are accompanied by audio, 3D meshes of the environment, eye gaze, stereo, and/or synchronized videos from multiple egocentric cameras at the same event. Furthermore, we present a host of new benchmark challenges centered around understanding the first-person visual experience in the past (querying an episodic memory), present (analyzing hand-object manipulation, audio-visual conversation, and social interactions), and future (forecasting activities). By publicly sharing this massive annotated dataset and benchmark suite, we aim to push the frontier of first-person perception. Project page: https://ego4d-data.org/
Improving Word Recognition using Multiple Hypotheses and Deep Embeddings
Oct 27, 2020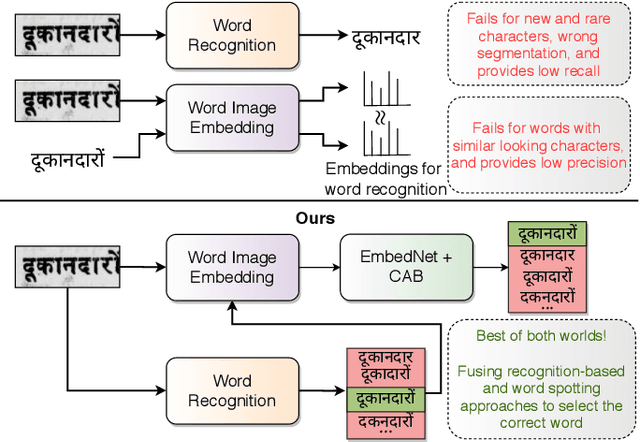
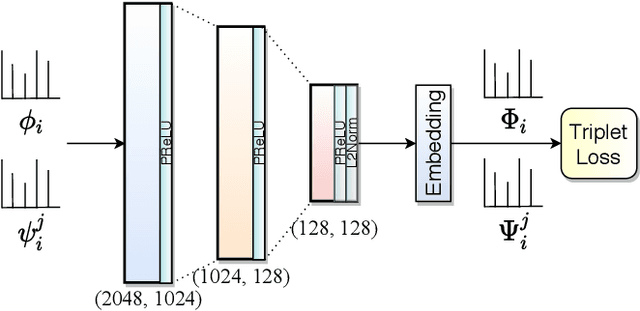
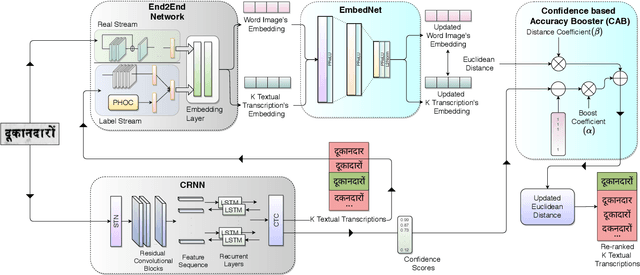
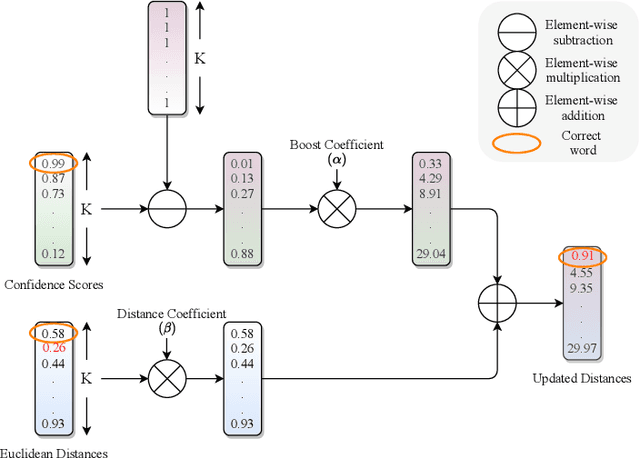
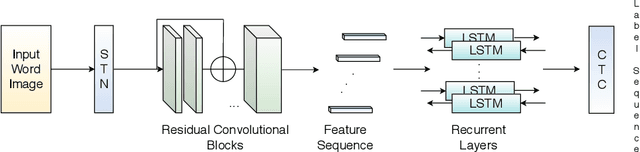
We propose a novel scheme for improving the word recognition accuracy using word image embeddings. We use a trained text recognizer, which can predict multiple text hypothesis for a given word image. Our fusion scheme improves the recognition process by utilizing the word image and text embeddings obtained from a trained word image embedding network. We propose EmbedNet, which is trained using a triplet loss for learning a suitable embedding space where the embedding of the word image lies closer to the embedding of the corresponding text transcription. The updated embedding space thus helps in choosing the correct prediction with higher confidence. To further improve the accuracy, we propose a plug-and-play module called Confidence based Accuracy Booster (CAB). The CAB module takes in the confidence scores obtained from the text recognizer and Euclidean distances between the embeddings to generate an updated distance vector. The updated distance vector has lower distance values for the correct words and higher distance values for the incorrect words. We rigorously evaluate our proposed method systematically on a collection of books in the Hindi language. Our method achieves an absolute improvement of around 10 percent in terms of word recognition accuracy.
Fused Text Recogniser and Deep Embeddings Improve Word Recognition and Retrieval
Jul 01, 2020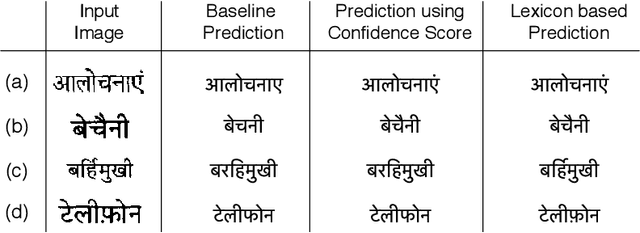
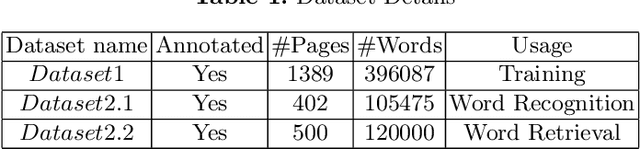
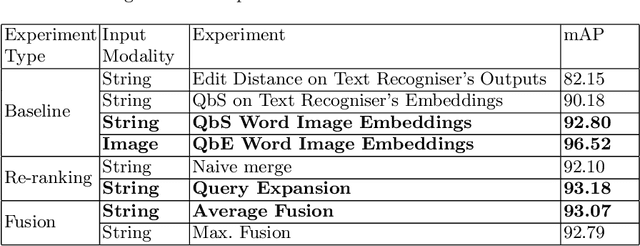
Recognition and retrieval of textual content from the large document collections have been a powerful use case for the document image analysis community. Often the word is the basic unit for recognition as well as retrieval. Systems that rely only on the text recogniser (OCR) output are not robust enough in many situations, especially when the word recognition rates are poor, as in the case of historic documents or digital libraries. An alternative has been word spotting based methods that retrieve/match words based on a holistic representation of the word. In this paper, we fuse the noisy output of text recogniser with a deep embeddings representation derived out of the entire word. We use average and max fusion for improving the ranked results in the case of retrieval. We validate our methods on a collection of Hindi documents. We improve word recognition rate by 1.4 and retrieval by 11.13 in the mAP.