 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology-Aware Skeleton Detection via Lighthouse-Guided Structured Inference
Apr 22, 2026In natural images, object skeletons are used to represent geometric shapes. However, even slight variations in pose or movement can cause noticeable changes in skeleton structure, increasing the difficulty of detecting the skeleton and often resulting in discontinuous skeletons. Existing methods primarily focus on point-level skeleton point detection and overlook the importance of structural continuity in recovering complete skeletons. To address this issue, we propose Lighthouse-Skel, a topology-aware skeleton detection method via lighthouse-guided structured inference. Specifically, we introduce a dual-branch collaborative detection framework that jointly learns skeleton confidence field and structural anchors, including endpoints and junction points. The spatial distributions learned by the point branch guide the network to focus on topologically vulnerable regions, which improves the accuracy of skeleton detection. Based on the learned skeleton confidence field, we further propose a lighthouse-guided topology completion strategy, which uses detected junction points and breakpoints as lighthouses to reconnect discontinuous skeleton segments along low-cost paths, thereby improving skeleton continuity and structural integrity. Experimental results on four public datasets demonstrate that the proposed method achieves competitive detection accuracy while substantially improving skeleton connectivity and structural integrity.
Attention-guided Evidence Grounding for Spoken Question Answering
Mar 17, 2026Spoken Question Answering (Spoken QA) presents a challenging cross-modal problem: effectively aligning acoustic queries with textual knowledge while avoiding the latency and error propagation inherent in cascaded ASR-based systems. In this paper, we introduce Attention-guided Evidence Grounding (AEG), a novel end-to-end framework that leverages the internal cross-modal attention of Speech Large Language Models (SpeechLLMs) to explicitly locate and ground key evidence in the model's latent space. To address the diffuse attention distribution in pre-trained models, we propose Learning to Focus on Evidence (LFE), a supervised fine-tuning paradigm that calibrates the model's attention mechanism to distinguish query-relevant segments from irrelevant context. Experiments on SQuAD, HotpotQA, and MuSiQue demonstrate that AEG reduces hallucinations and achieves strong efficiency gains, outperforming large-scale cascaded baselines (Whisper-Large-v3 + Reranker) while reducing inference latency by approximately 62%.
GUI-Libra: Training Native GUI Agents to Reason and Act with Action-aware Supervision and Partially Verifiable RL
Feb 25, 2026Open-source native GUI agents still lag behind closed-source systems on long-horizon navigation tasks. This gap stems from two limitations: a shortage of high-quality, action-aligned reasoning data, and the direct adoption of generic post-training pipelines that overlook the unique challenges of GUI agents. We identify two fundamental issues in these pipelines: (i) standard SFT with CoT reasoning often hurts grounding, and (ii) step-wise RLVR-tyle training faces partial verifiability, where multiple actions can be correct but only a single demonstrated action is used for verification. This makes offline step-wise metrics weak predictors of online task success. In this work, we present GUI-Libra, a tailored training recipe that addresses these challenges. First, to mitigate the scarcity of action-aligned reasoning data, we introduce a data construction and filtering pipeline and release a curated 81K GUI reasoning dataset. Second, to reconcile reasoning with grounding, we propose action-aware SFT that mixes reasoning-then-action and direct-action data and reweights tokens to emphasize action and grounding. Third, to stabilize RL under partial verifiability, we identify the overlooked importance of KL regularization in RLVR and show that a KL trust region is critical for improving offline-to-online predictability; we further introduce success-adaptive scaling to downweight unreliable negative gradients. Across diverse web and mobile benchmarks, GUI-Libra consistently improves both step-wise accuracy and end-to-end task completion. Our results suggest that carefully designed post-training and data curation can unlock significantly stronger task-solving capabilities without costly online data collection. We release our dataset, code, and models to facilitate further research on data-efficient post-training for reasoning-capable GUI agents.
SQuTR: A Robustness Benchmark for Spoken Query to Text Retrieval under Acoustic Noise
Feb 13, 2026Spoken query retrieval is an important interaction mode in modern information retrieval. However, existing evaluation datasets are often limited to simple queries under constrained noise conditions, making them inadequate for assessing the robustness of spoken query retrieval systems under complex acoustic perturbations. To address this limitation, we present SQuTR, a robustness benchmark for spoken query retrieval that includes a large-scale dataset and a unified evaluation protocol. SQuTR aggregates 37,317 unique queries from six commonly used English and Chinese text retrieval datasets, spanning multiple domains and diverse query types. We synthesize speech using voice profiles from 200 real speakers and mix 17 categories of real-world environmental noise under controlled SNR levels, enabling reproducible robustness evaluation from quiet to highly noisy conditions. Under the unified protocol, we conduct large-scale evaluations on representative cascaded and end-to-end retrieval systems. Experimental results show that retrieval performance decreases as noise increases, with substantially different drops across systems. Even large-scale retrieval models struggle under extreme noise, indicating that robustness remains a critical bottleneck. Overall, SQuTR provides a reproducible testbed for benchmarking and diagnostic analysis, and facilitates future research on robustness in spoken query to text retrieval.
Tail-Aware Post-Training Quantization for 3D Geometry Models
Feb 02, 2026The burgeoning complexity and scale of 3D geometry models pose significant challenges for deployment on resource-constrained platforms. While Post-Training Quantization (PTQ) enables efficient inference without retraining, conventional methods, primarily optimized for 2D Vision Transformers, fail to transfer effectively to 3D models due to intricate feature distributions and prohibitive calibration overhead. To address these challenges, we propose TAPTQ, a Tail-Aware Post-Training Quantization pipeline specifically engineered for 3D geometric learning. Our contribution is threefold: (1) To overcome the data-scale bottleneck in 3D datasets, we develop a progressive coarse-to-fine calibration construction strategy that constructs a highly compact subset to achieve both statistical purity and geometric representativeness. (2) We reformulate the quantization interval search as an optimization problem and introduce a ternary-search-based solver, reducing the computational complexity from $\mathcal{O}(N)$ to $\mathcal{O}(\log N)$ for accelerated deployment. (3) To mitigate quantization error accumulation, we propose TRE-Guided Module-wise Compensation, which utilizes a Tail Relative Error (TRE) metric to adaptively identify and rectify distortions in modules sensitive to long-tailed activation outliers. Extensive experiments on the VGGT and Pi3 benchmarks demonstrate that TAPTQ consistently outperforms state-of-the-art PTQ methods in accuracy while significantly reducing calibration time. The code will be released soon.
Deep GraphRAG: A Balanced Approach to Hierarchical Retrieval and Adaptive Integration
Jan 16, 2026Graph-based Retrieval-Augmented Generation (GraphRAG) frameworks face a trade-off between the comprehensiveness of global search and the efficiency of local search. Existing methods are often challenged by navigating large-scale hierarchical graphs, optimizing retrieval paths, and balancing exploration-exploitation dynamics, frequently lacking robust multi-stage re-ranking. To overcome these deficits, we propose Deep GraphRAG, a framework designed for a balanced approach to hierarchical retrieval and adaptive integration. It introduces a hierarchical global-to-local retrieval strategy that integrates macroscopic inter-community and microscopic intra-community contextual relations. This strategy employs a three-stage process: (1) inter-community filtering, which prunes the search space using local context; (2) community-level refinement, which prioritizes relevant subgraphs via entity-interaction analysis; and (3) entity-level fine-grained search within target communities. A beam search-optimized dynamic re-ranking module guides this process, continuously filtering candidates to balance efficiency and global comprehensiveness. Deep GraphRAG also features a Knowledge Integration Module leveraging a compact LLM, trained with Dynamic Weighting Reward GRPO (DW-GRPO). This novel reinforcement learning approach dynamically adjusts reward weights to balance three key objectives: relevance, faithfulness, and conciseness. This training enables compact models (1.5B) to approach the performance of large models (70B) in the integration task. Evaluations on Natural Questions and HotpotQA demonstrate that Deep GraphRAG significantly outperforms baseline graph retrieval methods in both accuracy and efficiency.
ERA: Transforming VLMs into Embodied Agents via Embodied Prior Learning and Online Reinforcement Learning
Oct 14, 2025Recent advances in embodied AI highlight the potential of vision language models (VLMs) as agents capable of perception, reasoning, and interaction in complex environments. However, top-performing systems rely on large-scale models that are costly to deploy, while smaller VLMs lack the necessary knowledge and skills to succeed. To bridge this gap, we present \textit{Embodied Reasoning Agent (ERA)}, a two-stage framework that integrates prior knowledge learning and online reinforcement learning (RL). The first stage, \textit{Embodied Prior Learning}, distills foundational knowledge from three types of data: (1) Trajectory-Augmented Priors, which enrich existing trajectory data with structured reasoning generated by stronger models; (2) Environment-Anchored Priors, which provide in-environment knowledge and grounding supervision; and (3) External Knowledge Priors, which transfer general knowledge from out-of-environment datasets. In the second stage, we develop an online RL pipeline that builds on these priors to further enhance agent performance. To overcome the inherent challenges in agent RL, including long horizons, sparse rewards, and training instability, we introduce three key designs: self-summarization for context management, dense reward shaping, and turn-level policy optimization. Extensive experiments on both high-level planning (EB-ALFRED) and low-level control (EB-Manipulation) tasks demonstrate that ERA-3B surpasses both prompting-based large models and previous training-based baselines. Specifically, it achieves overall improvements of 8.4\% on EB-ALFRED and 19.4\% on EB-Manipulation over GPT-4o, and exhibits strong generalization to unseen tasks. Overall, ERA offers a practical path toward scalable embodied intelligence, providing methodological insights for future embodied AI systems.
RLinf: Flexible and Efficient Large-scale Reinforcement Learning via Macro-to-Micro Flow Transformation
Sep 19, 2025
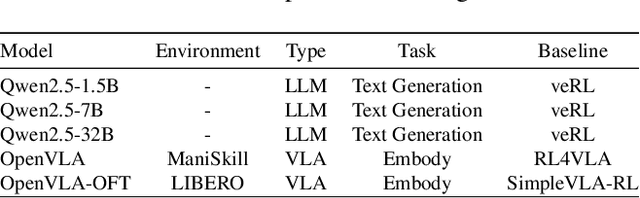

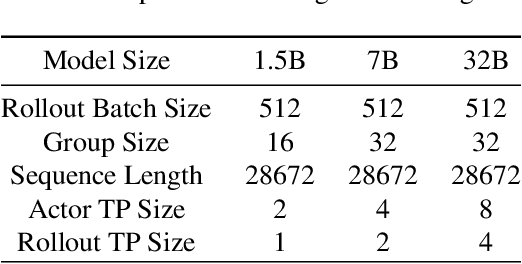
Reinforcement learning (RL) has demonstrated immense potential in advancing artificial general intelligence, agentic intelligence, and embodied intelligence. However, the inherent heterogeneity and dynamicity of RL workflows often lead to low hardware utilization and slow training on existing systems. In this paper, we present RLinf, a high-performance RL training system based on our key observation that the major roadblock to efficient RL training lies in system flexibility. To maximize flexibility and efficiency, RLinf is built atop a novel RL system design paradigm called macro-to-micro flow transformation (M2Flow), which automatically breaks down high-level, easy-to-compose RL workflows at both the temporal and spatial dimensions, and recomposes them into optimized execution flows. Supported by RLinf worker's adaptive communication capability, we devise context switching and elastic pipelining to realize M2Flow transformation, and a profiling-guided scheduling policy to generate optimal execution plans. Extensive evaluations on both reasoning RL and embodied RL tasks demonstrate that RLinf consistently outperforms state-of-the-art systems, achieving 1.1x-2.13x speedup in end-to-end training throughput.
MiniMax-M1: Scaling Test-Time Compute Efficiently with Lightning Attention
Jun 16, 2025



We introduce MiniMax-M1, the world's first open-weight, large-scale hybrid-attention reasoning model. MiniMax-M1 is powered by a hybrid Mixture-of-Experts (MoE) architecture combined with a lightning attention mechanism. The model is developed based on our previous MiniMax-Text-01 model, which contains a total of 456 billion parameters with 45.9 billion parameters activated per token. The M1 model natively supports a context length of 1 million tokens, 8x the context size of DeepSeek R1. Furthermore, the lightning attention mechanism in MiniMax-M1 enables efficient scaling of test-time compute. These properties make M1 particularly suitable for complex tasks that require processing long inputs and thinking extensively. MiniMax-M1 is trained using large-scale reinforcement learning (RL) on diverse problems including sandbox-based, real-world software engineering environments. In addition to M1's inherent efficiency advantage for RL training, we propose CISPO, a novel RL algorithm to further enhance RL efficiency. CISPO clips importance sampling weights rather than token updates, outperforming other competitive RL variants. Combining hybrid-attention and CISPO enables MiniMax-M1's full RL training on 512 H800 GPUs to complete in only three weeks, with a rental cost of just $534,700. We release two versions of MiniMax-M1 models with 40K and 80K thinking budgets respectively, where the 40K model represents an intermediate phase of the 80K training. Experiments on standard benchmarks show that our models are comparable or superior to strong open-weight models such as the original DeepSeek-R1 and Qwen3-235B, with particular strengths in complex software engineering, tool utilization, and long-context tasks. We publicly release MiniMax-M1 at https://github.com/MiniMax-AI/MiniMax-M1.
Ten Principles of AI Agent Economics
May 26, 2025The rapid rise of AI-based autonomous agents is transforming human society and economic systems, as these entities increasingly exhibit human-like or superhuman intelligence. From excelling at complex games like Go to tackling diverse general-purpose tasks with large language and multimodal models, AI agents are evolving from specialized tools into dynamic participants in social and economic ecosystems. Their autonomy and decision-making capabilities are poised to impact industries, professions, and human lives profoundly, raising critical questions about their integration into economic activities, potential ethical concerns, and the balance between their utility and safety. To address these challenges, this paper presents ten principles of AI agent economics, offering a framework to understand how AI agents make decisions, influence social interactions, and participate in the broader economy. Drawing on economics, decision theory, and ethics, we explore fundamental questions, such as whether AI agents might evolve from tools into independent entities, their impact on labor markets, and the ethical safeguards needed to align them with human values. These principles build on existing economic theories while accounting for the unique traits of AI agents, providing a roadmap for their responsible integration into human systems. Beyond theoretical insights, this paper highlights the urgency of future research into AI trustworthiness, ethical guidelines, and regulatory oversight. As we enter a transformative era, this work serves as both a guide and a call to action, ensuring AI agents contribute positively to human progress while addressing risks tied to their unprecedented capabilities.