 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePatchScene: Patch-based Voxel Diffusion for Large-Scale Scene Completion
Jun 02, 2026We propose PatchScene, a novel diffusion-based framework for large-scale LiDAR scene completion. Unlike existing methods that rely on global latent representations or dense voxel grids, PatchScene adopts a patch-based voxel diffusion paradigm that explicitly generates fine-grained geometry within localized 3D regions. To ensure coherent reconstruction at both spatial and temporal scales, we introduce a confidence-guided spatio-temporal fusion mechanism that integrates overlapping patches and adjacent frames in a unified generative process. Furthermore, we design an Annular-Flow diffusion strategy that leverages the radial density pattern of LiDAR scans to progressively propagate high-fidelity information from near-range to far-range regions, enabling spatially unbounded scene completion. Extensive experiments on the SemanticKITTI benchmark demonstrate that PatchScene achieves state-of-the-art performance across all standard metrics, surpassing previous approaches in both geometric accuracy and temporal consistency. Remarkably, the model trained on 20 m LiDAR ranges generalizes effectively to 50 m scenes without retraining, highlighting its strong scalability and generalization capability for real-world autonomous driving applications.
Embodied3DBench: Benchmarking Low-Level Embodied Spatial Intelligence of Vision Language Models
May 27, 2026Are current Vision Language Models (VLMs) ready to comprehend and reason about complex embodied interactions in 3D environments? We introduce Embodied3DBench, a robot-centric benchmark targeting low-level spatial intelligence in embodied 3D environments. To systematically evaluate these foundational perceptual capabilities, the benchmark includes 6 task categories divided into two core groups: Spatial Structural Understanding (Grounding, Spatial Relation Prediction, and Multi-view Correspondence) and Interaction-Oriented Perception (Affordance Prediction, Grasp Point Prediction, and Trajectory Prediction). The benchmark spans 12 subcategories and contains over 21k high-quality question-answer pairs. We evaluate 13 state-of-the-art models, and the results show that while current models exhibit relatively strong high-level spatial reasoning, such as understanding object-to-object positional relations, they remain fragile in interaction-oriented perception, highlighting a significant lack of robust 3D-aware interaction priors. To actively bridge this capability gap revealed by our benchmark, we further synthesize a large-scale training dataset comprising 1.3M QA pairs. Notably, fine-tuning on this dataset yields significant improvements in low-level spatial intelligence. Ultimately, Embodied3DBench fills a critical gap by providing both a systematic evaluation framework and a scalable data solution, setting a clear target for the development of interaction-aware multimodal systems.
JoyAI-RA 0.1: A Foundation Model for Robotic Autonomy
Apr 22, 2026Robotic autonomy in open-world environments is fundamentally limited by insufficient data diversity and poor cross-embodiment generalization. Existing robotic datasets are often limited in scale and task coverage, while relatively large differences across robot embodiments impede effective behavior knowledge transfer. To address these challenges, we propose JoyAI-RA, a vision-language-action (VLA) embodied foundation model tailored for generalizable robotic manipulation. JoyAI-RA presents a multi-source multi-level pretraining framework that integrates web data, large-scale egocentric human manipulation videos, simulation-generated trajectories, and real-robot data. Through training on heterogeneous multi-source data with explicit action-space unification, JoyAI-RA effectively bridges embodiment gaps, particularly between human manipulation and robotic control, thereby enhancing cross-embodiment behavior learning. JoyAI-RA outperforms state-of-the-art methods in both simulation and real-world benchmarks, especially on diverse tasks with generalization demands.
HiPolicy: Hierarchical Multi-Frequency Action Chunking for Policy Learning
Apr 07, 2026Robotic imitation learning faces a fundamental trade-off between modeling long-horizon dependencies and enabling fine-grained closed-loop control. Existing fixed-frequency action chunking approaches struggle to achieve both. Building on this insight, we propose HiPolicy, a hierarchical multi-frequency action chunking framework that jointly predicts action sequences at different frequencies to capture both coarse high-level plans and precise reactive motions. We extract and fuse hierarchical features from history observations aligned to each frequency for multi-frequency chunk generation, and introduce an entropy-guided execution mechanism that adaptively balances long-horizon planning with fine-grained control based on action uncertainty. Experiments on diverse simulated benchmarks and real-world manipulation tasks show that HiPolicy can be seamlessly integrated into existing 2D and 3D generative policies, delivering consistent improvements in performance while significantly enhancing execution efficiency.
FreeArtGS: Articulated Gaussian Splatting Under Free-moving Scenario
Mar 23, 2026The increasing demand for augmented reality and robotics is driving the need for articulated object reconstruction with high scalability. However, existing settings for reconstructing from discrete articulation states or casual monocular videos require non-trivial axis alignment or suffer from insufficient coverage, limiting their applicability. In this paper, we introduce FreeArtGS, a novel method for reconstructing articulated objects under free-moving scenario, a new setting with a simple setup and high scalability. FreeArtGS combines free-moving part segmentation with joint estimation and end-to-end optimization, taking only a monocular RGB-D video as input. By optimizing with the priors from off-the-shelf point-tracking and feature models, the free-moving part segmentation module identifies rigid parts from relative motion under unconstrained capture. The joint estimation module calibrates the unified object-to-camera poses and recovers joint type and axis robustly from part segmentation. Finally, 3DGS-based end-to-end optimization is implemented to jointly reconstruct visual textures, geometry, and joint angles of the articulated object. We conduct experiments on two benchmarks and real-world free-moving articulated objects. Experimental results demonstrate that FreeArtGS consistently excels in reconstructing free-moving articulated objects and remains highly competitive in previous reconstruction settings, proving itself a practical and effective solution for realistic asset generation. The project page is available at: https://freeartgs.github.io/
CADGrasp: Learning Contact and Collision Aware General Dexterous Grasping in Cluttered Scenes
Jan 21, 2026Dexterous grasping in cluttered environments presents substantial challenges due to the high degrees of freedom of dexterous hands, occlusion, and potential collisions arising from diverse object geometries and complex layouts. To address these challenges, we propose CADGrasp, a two-stage algorithm for general dexterous grasping using single-view point cloud inputs. In the first stage, we predict sparse IBS, a scene-decoupled, contact- and collision-aware representation, as the optimization target. Sparse IBS compactly encodes the geometric and contact relationships between the dexterous hand and the scene, enabling stable and collision-free dexterous grasp pose optimization. To enhance the prediction of this high-dimensional representation, we introduce an occupancy-diffusion model with voxel-level conditional guidance and force closure score filtering. In the second stage, we develop several energy functions and ranking strategies for optimization based on sparse IBS to generate high-quality dexterous grasp poses. Extensive experiments in both simulated and real-world settings validate the effectiveness of our approach, demonstrating its capability to mitigate collisions while maintaining a high grasp success rate across diverse objects and complex scenes.
TwinAligner: Visual-Dynamic Alignment Empowers Physics-aware Real2Sim2Real for Robotic Manipulation
Dec 22, 2025The robotics field is evolving towards data-driven, end-to-end learning, inspired by multimodal large models. However, reliance on expensive real-world data limits progress. Simulators offer cost-effective alternatives, but the gap between simulation and reality challenges effective policy transfer. This paper introduces TwinAligner, a novel Real2Sim2Real system that addresses both visual and dynamic gaps. The visual alignment module achieves pixel-level alignment through SDF reconstruction and editable 3DGS rendering, while the dynamic alignment module ensures dynamic consistency by identifying rigid physics from robot-object interaction. TwinAligner improves robot learning by providing scalable data collection and establishing a trustworthy iterative cycle, accelerating algorithm development. Quantitative evaluations highlight TwinAligner's strong capabilities in visual and dynamic real-to-sim alignment. This system enables policies trained in simulation to achieve strong zero-shot generalization to the real world. The high consistency between real-world and simulated policy performance underscores TwinAligner's potential to advance scalable robot learning. Code and data will be released on https://twin-aligner.github.io
CorrectNav: Self-Correction Flywheel Empowers Vision-Language-Action Navigation Model
Aug 14, 2025Existing vision-and-language navigation models often deviate from the correct trajectory when executing instructions. However, these models lack effective error correction capability, hindering their recovery from errors. To address this challenge, we propose Self-correction Flywheel, a novel post-training paradigm. Instead of considering the model's error trajectories on the training set as a drawback, our paradigm emphasizes their significance as a valuable data source. We have developed a method to identify deviations in these error trajectories and devised innovative techniques to automatically generate self-correction data for perception and action. These self-correction data serve as fuel to power the model's continued training. The brilliance of our paradigm is revealed when we re-evaluate the model on the training set, uncovering new error trajectories. At this time, the self-correction flywheel begins to spin. Through multiple flywheel iterations, we progressively enhance our monocular RGB-based VLA navigation model CorrectNav. Experiments on R2R-CE and RxR-CE benchmarks show CorrectNav achieves new state-of-the-art success rates of 65.1% and 69.3%, surpassing prior best VLA navigation models by 8.2% and 16.4%. Real robot tests in various indoor and outdoor environments demonstrate \method's superior capability of error correction, dynamic obstacle avoidance, and long instruction following.
ClutterDexGrasp: A Sim-to-Real System for General Dexterous Grasping in Cluttered Scenes
Jun 17, 2025
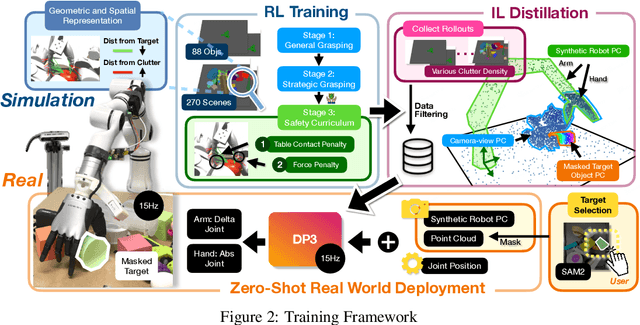
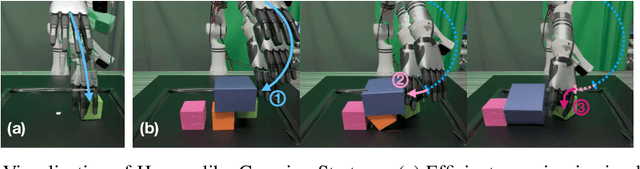
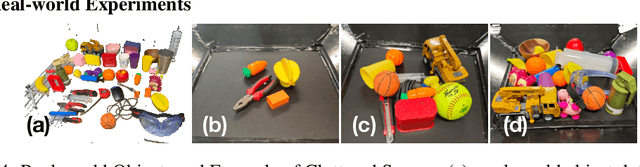
Dexterous grasping in cluttered scenes presents significant challenges due to diverse object geometries, occlusions, and potential collisions. Existing methods primarily focus on single-object grasping or grasp-pose prediction without interaction, which are insufficient for complex, cluttered scenes. Recent vision-language-action models offer a potential solution but require extensive real-world demonstrations, making them costly and difficult to scale. To address these limitations, we revisit the sim-to-real transfer pipeline and develop key techniques that enable zero-shot deployment in reality while maintaining robust generalization. We propose ClutterDexGrasp, a two-stage teacher-student framework for closed-loop target-oriented dexterous grasping in cluttered scenes. The framework features a teacher policy trained in simulation using clutter density curriculum learning, incorporating both a novel geometry and spatially-embedded scene representation and a comprehensive safety curriculum, enabling general, dynamic, and safe grasping behaviors. Through imitation learning, we distill the teacher's knowledge into a student 3D diffusion policy (DP3) that operates on partial point cloud observations. To the best of our knowledge, this represents the first zero-shot sim-to-real closed-loop system for target-oriented dexterous grasping in cluttered scenes, demonstrating robust performance across diverse objects and layouts. More details and videos are available at https://clutterdexgrasp.github.io/.
CheckManual: A New Challenge and Benchmark for Manual-based Appliance Manipulation
Jun 11, 2025Correct use of electrical appliances has significantly improved human life quality. Unlike simple tools that can be manipulated with common sense, different parts of electrical appliances have specific functions defined by manufacturers. If we want the robot to heat bread by microwave, we should enable them to review the microwave manual first. From the manual, it can learn about component functions, interaction methods, and representative task steps about appliances. However, previous manual-related works remain limited to question-answering tasks while existing manipulation researchers ignore the manual's important role and fail to comprehend multi-page manuals. In this paper, we propose the first manual-based appliance manipulation benchmark CheckManual. Specifically, we design a large model-assisted human-revised data generation pipeline to create manuals based on CAD appliance models. With these manuals, we establish novel manual-based manipulation challenges, metrics, and simulator environments for model performance evaluation. Furthermore, we propose the first manual-based manipulation planning model ManualPlan to set up a group of baselines for the CheckManual benchmark.