 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Based Dynamic Cluster Reconfiguration for UAV Mobility Management with 3D Beamforming
Jan 31, 2024In modern cell-less wireless networks, mobility management is undergoing a significant transformation, transitioning from single-link handover management to a more adaptable multi-connectivity cluster reconfiguration approach, including often conflicting objectives like energy-efficient power allocation and satisfying varying reliability requirements. In this work, we address the challenge of dynamic clustering and power allocation for unmanned aerial vehicle (UAV) communication in wireless interference networks. Our objective encompasses meeting varying reliability demands, minimizing power consumption, and reducing the frequency of cluster reconfiguration. To achieve these objectives, we introduce a novel approach based on reinforcement learning using a masked soft actor-critic algorithm, specifically tailored for dynamic clustering and power allocation.
Design of Downlink Hybrid NOMA Transmission
Jan 30, 2024The aim of this paper is to develop hybrid non-orthogonal multiple access (NOMA) assisted downlink transmission. First, for the single-input single-output (SISO) scenario, i.e., each node is equipped with a single antenna, a novel hybrid NOMA scheme is introduced, where NOMA is implemented as an add-on of a legacy time division multiple access (TDMA) network. Because of the simplicity of the SISO scenario, analytical results can be developed to reveal important properties of downlink hybrid NOMA. For example, in the case that the users' channel gains are ordered and the durations of their time slots are the same, downlink hybrid NOMA is shown to always outperform TDMA, which is different from the existing conclusion for uplink hybrid NOMA. Second, the proposed downlink SISO hybrid NOMA scheme is extended to the multiple-input single-output (MISO) scenario, i.e., the base station has multiple antennas. For the MISO scenario, near-field communication is considered to illustrate how NOMA can be used as an add-on in legacy networks based on space division multiple access and TDMA. Simulation results verify the developed analytical results and demonstrate the superior performance of downlink hybrid NOMA compared to conventional orthogonal multiple access.
Acceleration Estimation of Signal Propagation Path Length Changes for Wireless Sensing
Dec 30, 2023



As indoor applications grow in diversity, wireless sensing, vital in areas like localization and activity recognition, is attracting renewed interest. Indoor wireless sensing relies on signal processing, particularly channel state information (CSI) based signal parameter estimation. Nonetheless, regarding reflected signals induced by dynamic human targets, no satisfactory algorithm yet exists for estimating the acceleration of dynamic path length change (DPLC), which is crucial for various sensing tasks in this context. Hence, this paper proposes DP-AcE, a CSI-based DPLC acceleration estimation algorithm. We first model the relationship between the phase difference of adjacent CSI measurements and the DPLC's acceleration. Unlike existing works assuming constant velocity, DP-AcE considers both velocity and acceleration, yielding a more accurate and objective representation. Using this relationship, an algorithm combining scaling with Fourier transform is proposed to realize acceleration estimation. We evaluate DP-AcE via the acceleration estimation and acceleration-based fall detection with the collected CSI. Experimental results reveal that, using distance as the metric, DP-AcE achieves a median acceleration estimation percentage error of 4.38%. Furthermore, in multi-target scenarios, the fall detection achieves an average true positive rate of 89.56% and a false positive rate of 11.78%, demonstrating its importance in enhancing indoor wireless sensing capabilities.
Reinforcement Learning Based Dynamic Power Control for UAV Mobility Management
Dec 07, 2023


Modern communication systems need to fulfill multiple and often conflicting objectives at the same time. In particular, new applications require high reliability while operating at low transmit powers. Moreover, reliability constraints may vary over time depending on the current state of the system. One solution to address this problem is to use joint transmissions from a number of base stations (BSs) to meet the reliability requirements. However, this approach is inefficient when considering the overall total transmit power. In this work, we propose a reinforcement learning-based power allocation scheme for an unmanned aerial vehicle (UAV) communication system with varying communication reliability requirements. In particular, the proposed scheme aims to minimize the total transmit power of all BSs while achieving an outage probability that is less than a tolerated threshold. This threshold varies over time, e.g., when the UAV enters a critical zone with high-reliability requirements. Our results show that the proposed learning scheme uses dynamic power allocation to meet varying reliability requirements, thus effectively conserving energy.
Data-Agnostic Model Poisoning against Federated Learning: A Graph Autoencoder Approach
Nov 30, 2023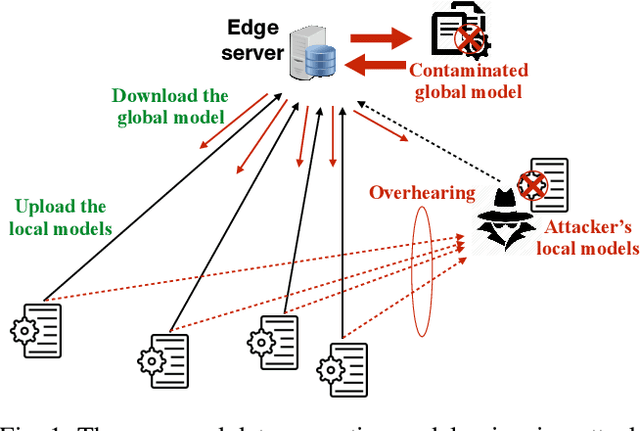
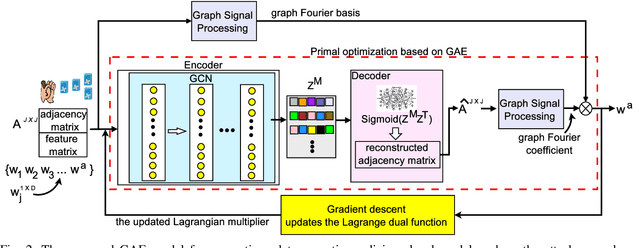
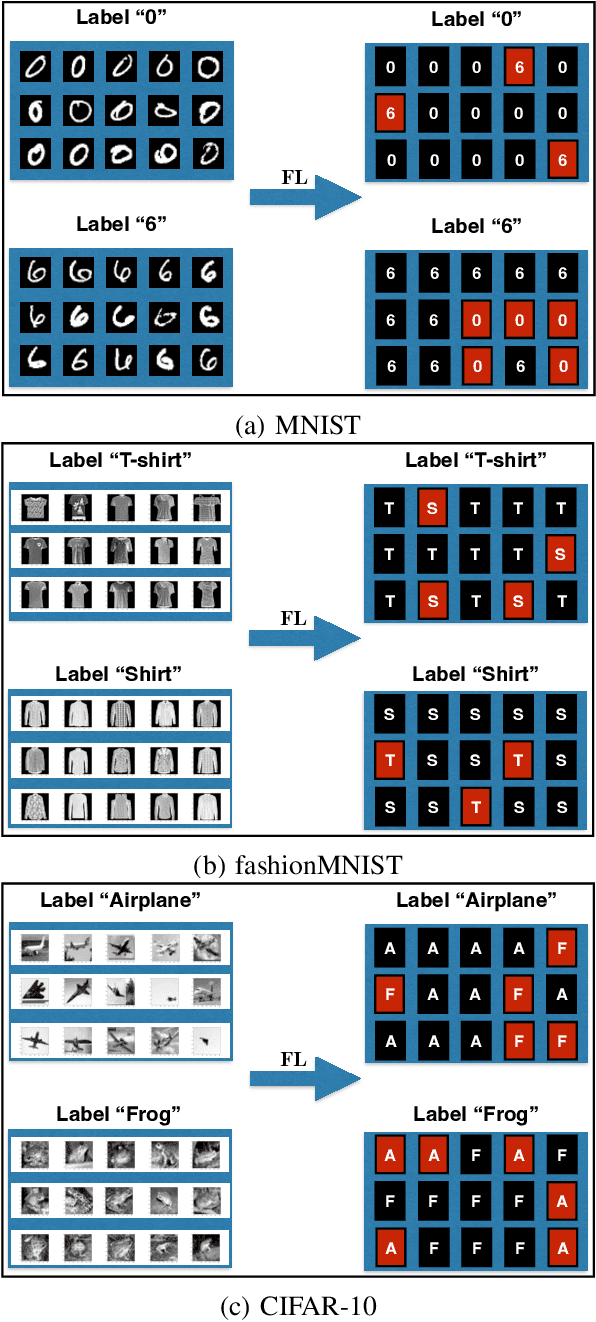
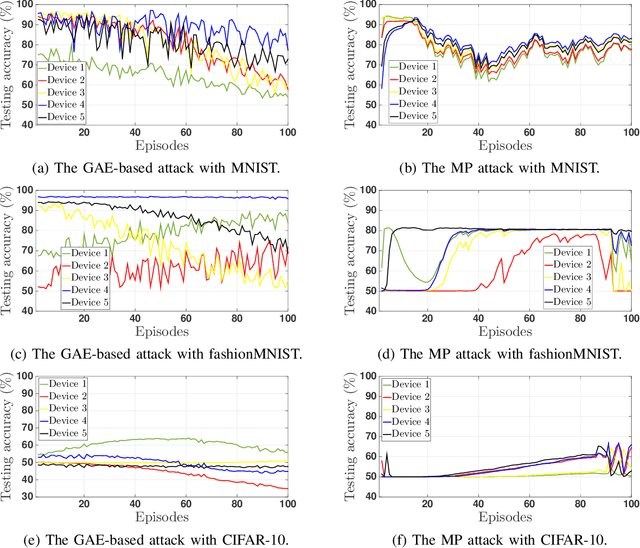
This paper proposes a novel, data-agnostic, model poisoning attack on Federated Learning (FL), by designing a new adversarial graph autoencoder (GAE)-based framework. The attack requires no knowledge of FL training data and achieves both effectiveness and undetectability. By listening to the benign local models and the global model, the attacker extracts the graph structural correlations among the benign local models and the training data features substantiating the models. The attacker then adversarially regenerates the graph structural correlations while maximizing the FL training loss, and subsequently generates malicious local models using the adversarial graph structure and the training data features of the benign ones. A new algorithm is designed to iteratively train the malicious local models using GAE and sub-gradient descent. The convergence of FL under attack is rigorously proved, with a considerably large optimality gap. Experiments show that the FL accuracy drops gradually under the proposed attack and existing defense mechanisms fail to detect it. The attack can give rise to an infection across all benign devices, making it a serious threat to FL.
Beamforming Design for Active RIS-Aided Over-the-Air Computation
Nov 30, 2023



Over-the-air computation (AirComp) is emerging as a promising technology for wireless data aggregation. However, its performance is hampered by users with poor channel conditions. To mitigate such a performance bottleneck, this paper introduces an active reconfigurable intelligence surface (RIS) into the AirComp system. Specifically, we begin by exploring the ideal RIS model and propose a joint optimization of the transceiver design and RIS configuration to minimize the mean squared error (MSE) between the target and estimated function values. To manage the resultant tri-convex optimization problem, we employ the alternating optimization (AO) technique to decompose it into three convex subproblems, each solvable optimally. Subsequently, we investigate two specific cases and analyze their respective asymptotic performance to reveal the superiority of the active RIS in mitigating the MSE relative to its passive counterpart. Lastly, we adapt our transceiver and RIS configuration design to account for the self-interference of the active RIS. To handle the resultant highly non-convex problem, we further devise a two-layer AO framework. Simulation results demonstrate the superiority of the active RIS in enhancing AirComp performance compared to its passive counterpart.
From OTFS to DD-ISAC: Integrating Sensing and Communications in the Delay Doppler Domain
Nov 26, 2023



Next-generation vehicular networks are expected to provide the capability of robust environmental sensing in addition to reliable communications to meet intelligence requirements. A promising solution is the integrated sensing and communication (ISAC) technology, which performs both functionalities using the same spectrum and hardware resources. Most existing works on ISAC consider the Orthogonal Frequency Division Multiplexing (OFDM) waveform. Nevertheless, vehicle motion introduces Doppler shift, which breaks the subcarrier orthogonality and leads to performance degradation. The recently proposed Orthogonal Time Frequency Space (OTFS) modulation, which exploits various advantages of Delay Doppler (DD) channels, has been shown to support reliable communication in high-mobility scenarios. Moreover, the DD waveform can directly interact with radar sensing parameters, which are actually delay and Doppler shifts. This paper investigates the advantages of applying the DD communication waveform to ISAC. Specifically, we first provide a comprehensive overview of implementing DD communications, based on which several advantages of DD-ISAC over OFDM-based ISAC are revealed, including transceiver designs and the ambiguity function. Furthermore, a detailed performance comparison are presented, where the target detection probability and the mean squared error (MSE) performance are also studied. Finally, some challenges and opportunities of DD-ISAC are also provided.
OFDMA-F$^2$L: Federated Learning With Flexible Aggregation Over an OFDMA Air Interface
Nov 25, 2023Federated learning (FL) can suffer from a communication bottleneck when deployed in mobile networks, limiting participating clients and deterring FL convergence. The impact of practical air interfaces with discrete modulations on FL has not previously been studied in depth. This paper proposes a new paradigm of flexible aggregation-based FL (F$^2$L) over orthogonal frequency division multiple-access (OFDMA) air interface, termed as ``OFDMA-F$^2$L'', allowing selected clients to train local models for various numbers of iterations before uploading the models in each aggregation round. We optimize the selections of clients, subchannels and modulations, adapting to channel conditions and computing powers. Specifically, we derive an upper bound on the optimality gap of OFDMA-F$^2$L capturing the impact of the selections, and show that the upper bound is minimized by maximizing the weighted sum rate of the clients per aggregation round. A Lagrange-dual based method is developed to solve this challenging mixed integer program of weighted sum rate maximization, revealing that a ``winner-takes-all'' policy provides the almost surely optimal client, subchannel, and modulation selections. Experiments on multilayer perceptrons and convolutional neural networks show that OFDMA-F$^2$L with optimal selections can significantly improve the training convergence and accuracy, e.g., by about 18\% and 5\%, compared to potential alternatives.
Exploring the Privacy-Energy Consumption Tradeoff for Split Federated Learning
Nov 15, 2023Split Federated Learning (SFL) has recently emerged as a promising distributed learning technology, leveraging the strengths of both federated learning and split learning. It emphasizes the advantages of rapid convergence while addressing privacy concerns. As a result, this innovation has received significant attention from both industry and academia. However, since the model is split at a specific layer, known as a cut layer, into both client-side and server-side models for the SFL, the choice of the cut layer in SFL can have a substantial impact on the energy consumption of clients and their privacy, as it influences the training burden and the output of the client-side models. Moreover, the design challenge of determining the cut layer is highly intricate, primarily due to the inherent heterogeneity in the computing and networking capabilities of clients. In this article, we provide a comprehensive overview of the SFL process and conduct a thorough analysis of energy consumption and privacy. This analysis takes into account the influence of various system parameters on the cut layer selection strategy. Additionally, we provide an illustrative example of the cut layer selection, aiming to minimize the risk of clients from reconstructing the raw data at the server while sustaining energy consumption within the required energy budget, which involve trade-offs. Finally, we address open challenges in this field including their applications to 6G technology. These directions represent promising avenues for future research and development.
How Physicality Enables Trust: A New Era of Trust-Centered Cyberphysical Systems
Nov 13, 2023



Multi-agent cyberphysical systems enable new capabilities in efficiency, resilience, and security. The unique characteristics of these systems prompt a reevaluation of their security concepts, including their vulnerabilities, and mechanisms to mitigate these vulnerabilities. This survey paper examines how advancement in wireless networking, coupled with the sensing and computing in cyberphysical systems, can foster novel security capabilities. This study delves into three main themes related to securing multi-agent cyberphysical systems. First, we discuss the threats that are particularly relevant to multi-agent cyberphysical systems given the potential lack of trust between agents. Second, we present prospects for sensing, contextual awareness, and authentication, enabling the inference and measurement of ``inter-agent trust" for these systems. Third, we elaborate on the application of quantifiable trust notions to enable ``resilient coordination," where ``resilient" signifies sustained functionality amid attacks on multiagent cyberphysical systems. We refer to the capability of cyberphysical systems to self-organize, and coordinate to achieve a task as autonomy. This survey unveils the cyberphysical character of future interconnected systems as a pivotal catalyst for realizing robust, trust-centered autonomy in tomorrow's world.