 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEAGym: An Evaluation Environment for Self-Evolving LLM Agents
Jun 16, 2026Self-evolving LLM-based agents improve mainly by changing their agent harness: the structured execution layer around a base model, including prompts, memory, tools, middleware, runtime state, and the model-tool interaction loop. Existing evaluations often reduce this process to isolated task scores or a single sequential curve, obscuring whether an update produces reusable improvement, overfits recent tasks, increases cost, or harms older behavior. We introduce SEAGym, an evaluation environment for measuring agent harness updates across training, validation, test, replay, and cost records. SEAGym turns Harbor-compatible benchmarks into dynamic self-evolution task sources with train batches, frozen update-validation, held-out ID and OOD transfer views, replay diagnostics, and saved snapshot and metric records. Instantiating SEAGym on Terminal-Bench 2.0 and HLE, we compare ACE, TF-GRPO, and AHE under a shared epoch/batch protocol. The results show that these evaluation views provide complementary signals about the evolution process: frequent updates may fail to improve held-out performance, useful intermediate snapshots may collapse later, and source diversity and model backend can affect harness reliability.
Deliberate Evolution: Agentic Reasoning for Sample-Efficient Symbolic Regression with LLMs
Jun 03, 2026Symbolic regression (SR) discovers compact mathematical expressions from data, yet recent LLM-based evolutionary methods remain sample-inefficient because they rely mainly on scalar feedback such as MSE. We identify a core limitation: existing methods conflate candidate proposal with search guidance, requiring the LLM to infer how to evolve an expression, diagnose its errors, and reuse past experience from a single score. To address this, we propose Deliberate Evolution (DE), an agentic framework that decouples symbolic generation from search control. DE guides LLM proposals with adaptive operators for search direction, analytical tools for structural diagnosis, and reflective memory for trajectory-level experience. Experiments on LLM-SRBench show that DE consistently outperforms representative LLM-based SR baselines across diverse scientific domains while using only 40% of the standard sample budget.
Affordance-Graphed Task Worlds: Self-Evolving Task Generation for Scalable Embodied Learning
Feb 12, 2026Training robotic policies directly in the real world is expensive and unscalable. Although generative simulation enables large-scale data synthesis, current approaches often fail to generate logically coherent long-horizon tasks and struggle with dynamic physical uncertainties due to open-loop execution. To address these challenges, we propose Affordance-Graphed Task Worlds (AGT-World), a unified framework that autonomously constructs interactive simulated environments and corresponding robot task policies based on real-world observations. Unlike methods relying on random proposals or static replication, AGT-World formalizes the task space as a structured graph, enabling the precise, hierarchical decomposition of complex goals into theoretically grounded atomic primitives. Furthermore, we introduce a Self-Evolution mechanism with hybrid feedback to autonomously refine policies, combining Vision-Language Model reasoning and geometric verification. Extensive experiments demonstrate that our method significantly outperforms in success rates and generalization, achieving a self-improving cycle of proposal, execution, and correction for scalable robot learning.
An Agentic Framework for Autonomous Materials Computation
Dec 22, 2025



Large Language Models (LLMs) have emerged as powerful tools for accelerating scientific discovery, yet their static knowledge and hallucination issues hinder autonomous research applications. Recent advances integrate LLMs into agentic frameworks, enabling retrieval, reasoning, and tool use for complex scientific workflows. Here, we present a domain-specialized agent designed for reliable automation of first-principles materials computations. By embedding domain expertise, the agent ensures physically coherent multi-step workflows and consistently selects convergent, well-posed parameters, thereby enabling reliable end-to-end computational execution. A new benchmark of diverse computational tasks demonstrates that our system significantly outperforms standalone LLMs in both accuracy and robustness. This work establishes a verifiable foundation for autonomous computational experimentation and represents a key step toward fully automated scientific discovery.
CALM: Consensus-Aware Localized Merging for Multi-Task Learning
Jun 16, 2025Model merging aims to integrate the strengths of multiple fine-tuned models into a unified model while preserving task-specific capabilities. Existing methods, represented by task arithmetic, are typically classified into global- and local-aware methods. However, global-aware methods inevitably cause parameter interference, while local-aware methods struggle to maintain the effectiveness of task-specific details in the merged model. To address these limitations, we propose a Consensus-Aware Localized Merging (CALM) method which incorporates localized information aligned with global task consensus, ensuring its effectiveness post-merging. CALM consists of three key components: (1) class-balanced entropy minimization sampling, providing a more flexible and reliable way to leverage unsupervised data; (2) an efficient-aware framework, selecting a small set of tasks for sequential merging with high scalability; (3) a consensus-aware mask optimization, aligning localized binary masks with global task consensus and merging them conflict-free. Experiments demonstrate the superiority and robustness of our CALM, significantly outperforming existing methods and achieving performance close to traditional MTL.
Learning without Isolation: Pathway Protection for Continual Learning
May 24, 2025



Deep networks are prone to catastrophic forgetting during sequential task learning, i.e., losing the knowledge about old tasks upon learning new tasks. To this end, continual learning(CL) has emerged, whose existing methods focus mostly on regulating or protecting the parameters associated with the previous tasks. However, parameter protection is often impractical, since the size of parameters for storing the old-task knowledge increases linearly with the number of tasks, otherwise it is hard to preserve the parameters related to the old-task knowledge. In this work, we bring a dual opinion from neuroscience and physics to CL: in the whole networks, the pathways matter more than the parameters when concerning the knowledge acquired from the old tasks. Following this opinion, we propose a novel CL framework, learning without isolation(LwI), where model fusion is formulated as graph matching and the pathways occupied by the old tasks are protected without being isolated. Thanks to the sparsity of activation channels in a deep network, LwI can adaptively allocate available pathways for a new task, realizing pathway protection and addressing catastrophic forgetting in a parameter-efficient manner. Experiments on popular benchmark datasets demonstrate the superiority of the proposed LwI.
Accurate Forgetting for Heterogeneous Federated Continual Learning
Feb 20, 2025



Recent years have witnessed a burgeoning interest in federated learning (FL). However, the contexts in which clients engage in sequential learning remain under-explored. Bridging FL and continual learning (CL) gives rise to a challenging practical problem: federated continual learning (FCL). Existing research in FCL primarily focuses on mitigating the catastrophic forgetting issue of continual learning while collaborating with other clients. We argue that the forgetting phenomena are not invariably detrimental. In this paper, we consider a more practical and challenging FCL setting characterized by potentially unrelated or even antagonistic data/tasks across different clients. In the FL scenario, statistical heterogeneity and data noise among clients may exhibit spurious correlations which result in biased feature learning. While existing CL strategies focus on a complete utilization of previous knowledge, we found that forgetting biased information is beneficial in our study. Therefore, we propose a new concept accurate forgetting (AF) and develop a novel generative-replay method~\method~which selectively utilizes previous knowledge in federated networks. We employ a probabilistic framework based on a normalizing flow model to quantify the credibility of previous knowledge. Comprehensive experiments affirm the superiority of our method over baselines.
Socratic Questioning: Learn to Self-guide Multimodal Reasoning in the Wild
Jan 07, 2025



Complex visual reasoning remains a key challenge today. Typically, the challenge is tackled using methodologies such as Chain of Thought (COT) and visual instruction tuning. However, how to organically combine these two methodologies for greater success remains unexplored. Also, issues like hallucinations and high training cost still need to be addressed. In this work, we devise an innovative multi-round training and reasoning framework suitable for lightweight Multimodal Large Language Models (MLLMs). Our self-questioning approach heuristically guides MLLMs to focus on visual clues relevant to the target problem, reducing hallucinations and enhancing the model's ability to describe fine-grained image details. This ultimately enables the model to perform well in complex visual reasoning and question-answering tasks. We have named this framework Socratic Questioning(SQ). To facilitate future research, we create a multimodal mini-dataset named CapQA, which includes 1k images of fine-grained activities, for visual instruction tuning and evaluation, our proposed SQ method leads to a 31.2% improvement in the hallucination score. Our extensive experiments on various benchmarks demonstrate SQ's remarkable capabilities in heuristic self-questioning, zero-shot visual reasoning and hallucination mitigation. Our model and code will be publicly available.
Physics Reasoner: Knowledge-Augmented Reasoning for Solving Physics Problems with Large Language Models
Dec 18, 2024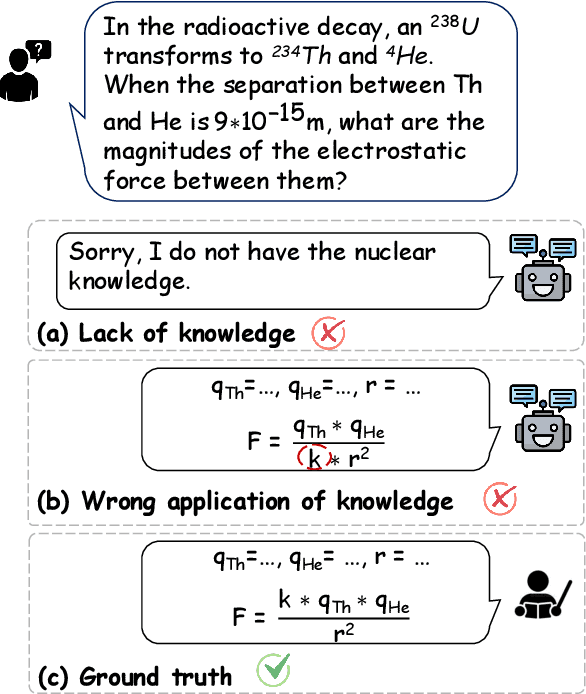
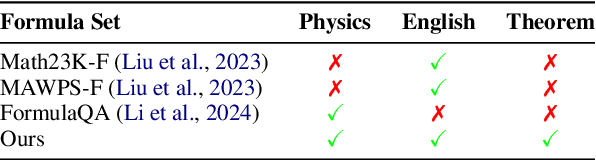
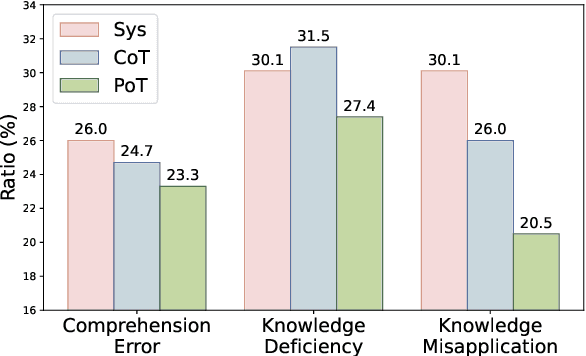
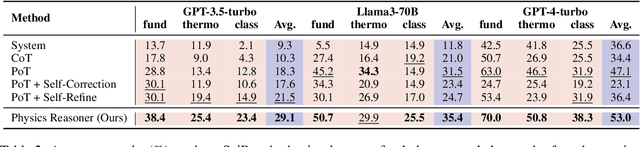
Physics problems constitute a significant aspect of reasoning, necessitating complicated reasoning ability and abundant physics knowledge. However, existing large language models (LLMs) frequently fail due to a lack of knowledge or incorrect knowledge application. To mitigate these issues, we propose Physics Reasoner, a knowledge-augmented framework to solve physics problems with LLMs. Specifically, the proposed framework constructs a comprehensive formula set to provide explicit physics knowledge and utilizes checklists containing detailed instructions to guide effective knowledge application. Namely, given a physics problem, Physics Reasoner solves it through three stages: problem analysis, formula retrieval, and guided reasoning. During the process, checklists are employed to enhance LLMs' self-improvement in the analysis and reasoning stages. Empirically, Physics Reasoner mitigates the issues of insufficient knowledge and incorrect application, achieving state-of-the-art performance on SciBench with an average accuracy improvement of 5.8%.
Abstraction-of-Thought Makes Language Models Better Reasoners
Jun 18, 2024



Abstract reasoning, the ability to reason from the abstract essence of a problem, serves as a key to generalization in human reasoning. However, eliciting language models to perform reasoning with abstraction remains unexplored. This paper seeks to bridge this gap by introducing a novel structured reasoning format called Abstraction-of-Thought (AoT). The uniqueness of AoT lies in its explicit requirement for varying levels of abstraction within the reasoning process. This approach could elicit language models to first contemplate on the abstract level before incorporating concrete details, which is overlooked by the prevailing step-by-step Chain-of-Thought (CoT) method. To align models with the AoT format, we present AoT Collection, a generic finetuning dataset consisting of 348k high-quality samples with AoT reasoning processes, collected via an automated and scalable pipeline. We finetune a wide range of language models with AoT Collection and conduct extensive evaluations on 23 unseen tasks from the challenging benchmark Big-Bench Hard. Experimental results indicate that models aligned to AoT reasoning format substantially outperform those aligned to CoT in many reasoning tasks.