 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
MolCPT: Molecule Continuous Prompt Tuning to Generalize Molecular Representation Learning
Dec 20, 2022
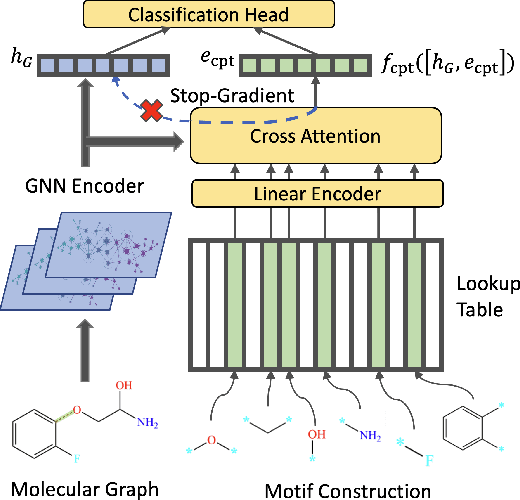
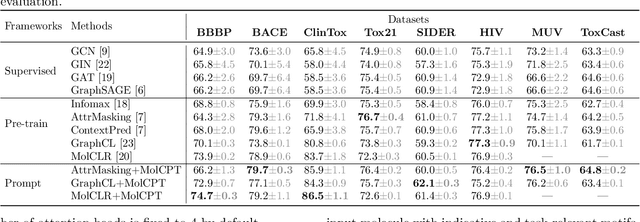
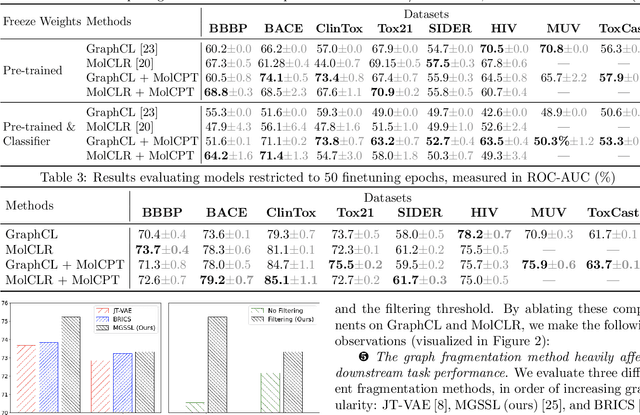

Molecular representation learning is crucial for the problem of molecular property prediction, where graph neural networks (GNNs) serve as an effective solution due to their structure modeling capabilities. Since labeled data is often scarce and expensive to obtain, it is a great challenge for GNNs to generalize in the extensive molecular space. Recently, the training paradigm of "pre-train, fine-tune" has been leveraged to improve the generalization capabilities of GNNs. It uses self-supervised information to pre-train the GNN, and then performs fine-tuning to optimize the downstream task with just a few labels. However, pre-training does not always yield statistically significant improvement, especially for self-supervised learning with random structural masking. In fact, the molecular structure is characterized by motif subgraphs, which are frequently occurring and influence molecular properties. To leverage the task-related motifs, we propose a novel paradigm of "pre-train, prompt, fine-tune" for molecular representation learning, named molecule continuous prompt tuning (MolCPT). MolCPT defines a motif prompting function that uses the pre-trained model to project the standalone input into an expressive prompt. The prompt effectively augments the molecular graph with meaningful motifs in the continuous representation space; this provides more structural patterns to aid the downstream classifier in identifying molecular properties. Extensive experiments on several benchmark datasets show that MolCPT efficiently generalizes pre-trained GNNs for molecular property prediction, with or without a few fine-tuning steps.
Sophisticated deep learning with on-chip optical diffractive tensor processing
Dec 20, 2022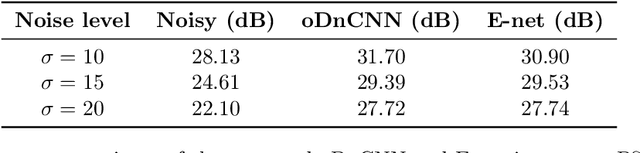
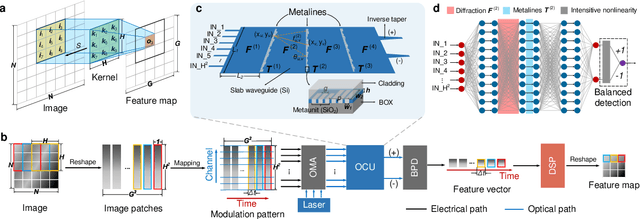
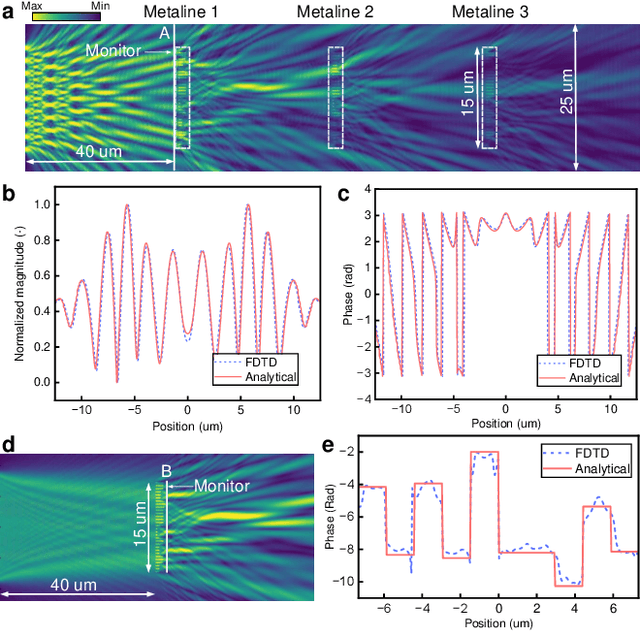
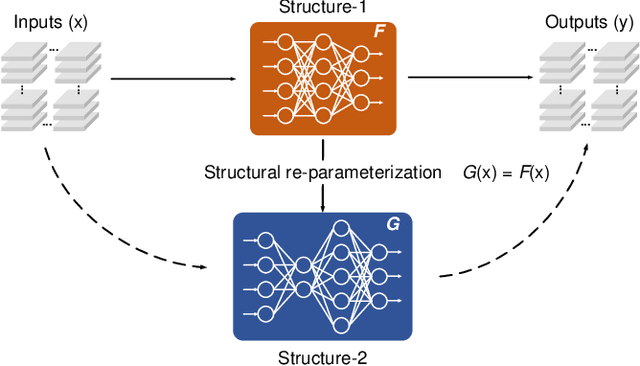
The ever-growing deep learning technologies are making revolutionary changes for modern life. However, conventional computing architectures are designed to process sequential and digital programs, being extremely burdened with performing massive parallel and adaptive deep learning applications. Photonic integrated circuits provide an efficient approach to mitigate bandwidth limitations and power-wall brought by its electronic counterparts, showing great potential in ultrafast and energy-free high-performance computing. Here, we propose an optical computing architecture enabled by on-chip diffraction to implement convolutional acceleration, termed optical convolution unit (OCU). We demonstrate that any real-valued convolution kernels can be exploited by OCU with a prominent computational throughput boosting via the concept of structral re-parameterization. With OCU as the fundamental unit, we build an optical convolutional neural network (oCNN) to implement two popular deep learning tasks: classification and regression. For classification, Fashion-MNIST and CIFAR-4 datasets are tested with accuracy of 91.63% and 86.25%, respectively. For regression, we build an optical denoising convolutional neural network (oDnCNN) to handle Gaussian noise in gray scale images with noise level {\sigma} = 10, 15, 20, resulting clean images with average PSNR of 31.70dB, 29.39dB and 27.72dB, respectively. The proposed OCU presents remarkable performance of low energy consumption and high information density due to its fully passive nature and compact footprint, providing a highly parallel while lightweight solution for future computing architecture to handle high dimensional tensors in deep learning.
Controlling Bias Exposure for Fair Interpretable Predictions
Oct 14, 2022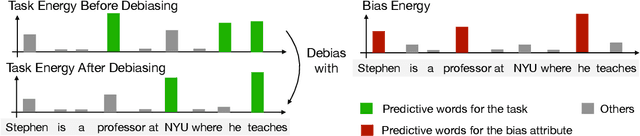
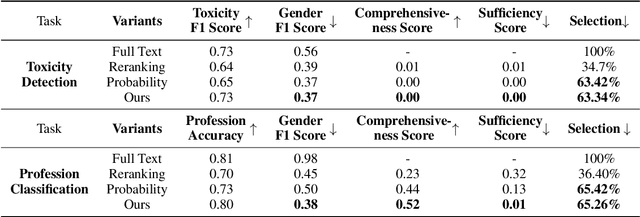
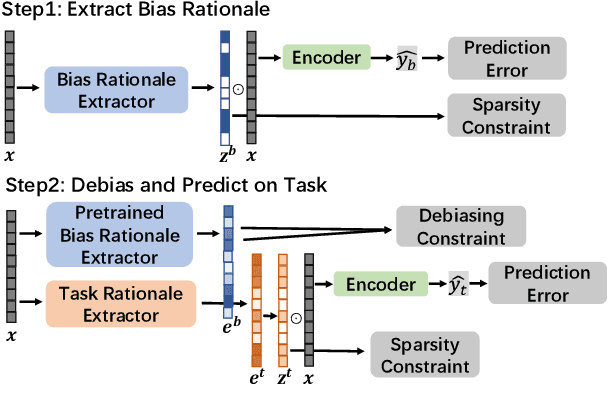
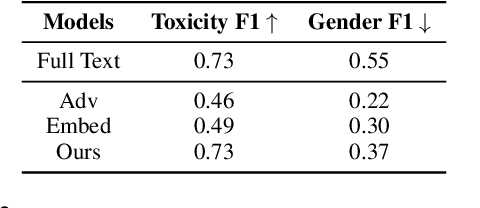
Recent work on reducing bias in NLP models usually focuses on protecting or isolating information related to a sensitive attribute (like gender or race). However, when sensitive information is semantically entangled with the task information of the input, e.g., the gender information is predictive for a profession, a fair trade-off between task performance and bias mitigation is difficult to achieve. Existing approaches perform this trade-off by eliminating bias information from the latent space, lacking control over how much bias is necessarily required to be removed. We argue that a favorable debiasing method should use sensitive information 'fairly' rather than blindly eliminating it (Caliskan et al., 2017; Sun et al., 2019). In this work, we provide a novel debiasing algorithm by adjusting the predictive model's belief to (1) ignore the sensitive information if it is not useful for the task; (2) use sensitive information minimally as necessary for the prediction (while also incurring a penalty). Experimental results on two text classification tasks (influenced by gender) and an open-ended generation task (influenced by race) indicate that our model achieves a desirable trade-off between debiasing and task performance along with producing debiased rationales as evidence.
RAGO: Recurrent Graph Optimizer For Multiple Rotation Averaging
Dec 14, 2022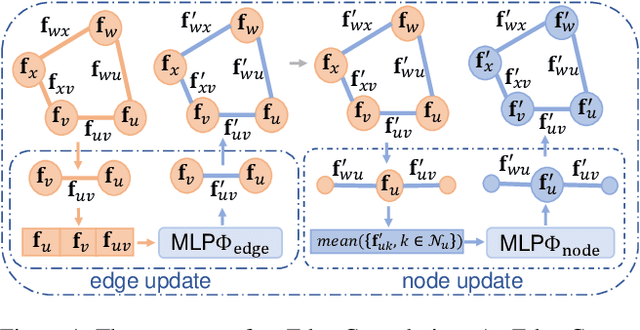
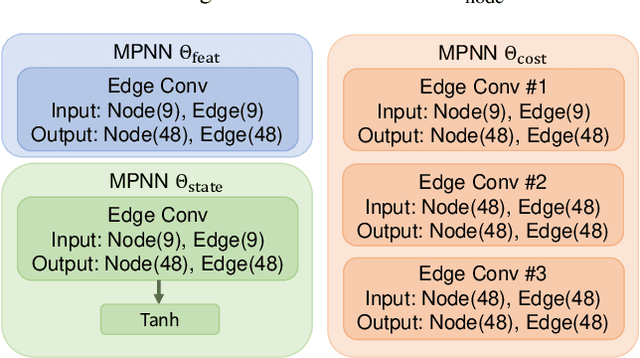
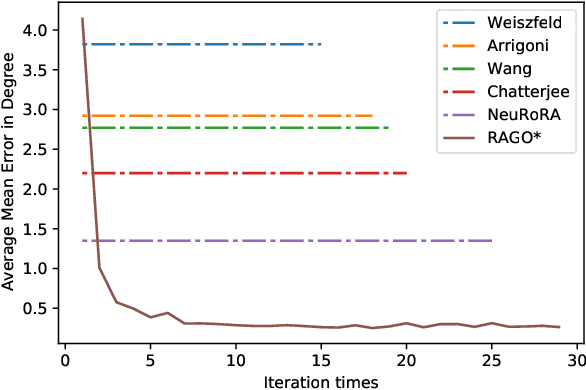
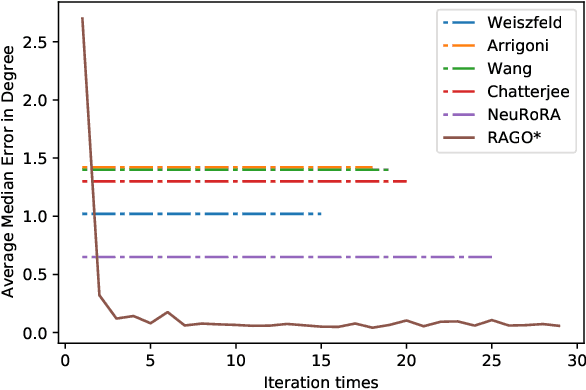
This paper proposes a deep recurrent Rotation Averaging Graph Optimizer (RAGO) for Multiple Rotation Averaging (MRA). Conventional optimization-based methods usually fail to produce accurate results due to corrupted and noisy relative measurements. Recent learning-based approaches regard MRA as a regression problem, while these methods are sensitive to initialization due to the gauge freedom problem. To handle these problems, we propose a learnable iterative graph optimizer minimizing a gauge-invariant cost function with an edge rectification strategy to mitigate the effect of inaccurate measurements. Our graph optimizer iteratively refines the global camera rotations by minimizing each node's single rotation objective function. Besides, our approach iteratively rectifies relative rotations to make them more consistent with the current camera orientations and observed relative rotations. Furthermore, we employ a gated recurrent unit to improve the result by tracing the temporal information of the cost graph. Our framework is a real-time learning-to-optimize rotation averaging graph optimizer with a tiny size deployed for real-world applications. RAGO outperforms previous traditional and deep methods on real-world and synthetic datasets. The code is available at https://github.com/sfu-gruvi-3dv/RAGO
* Accepted by CVPR 2022
DialogQAE: N-to-N Question Answer Pair Extraction from Customer Service Chatlog
Dec 14, 2022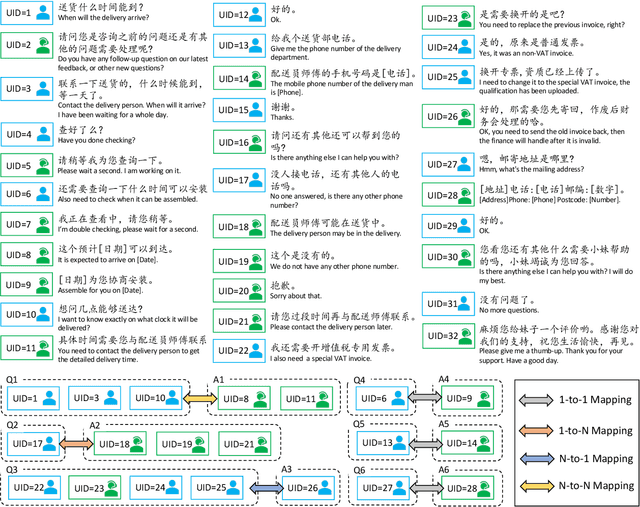
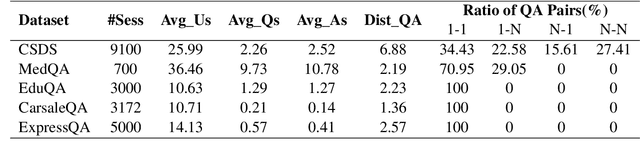

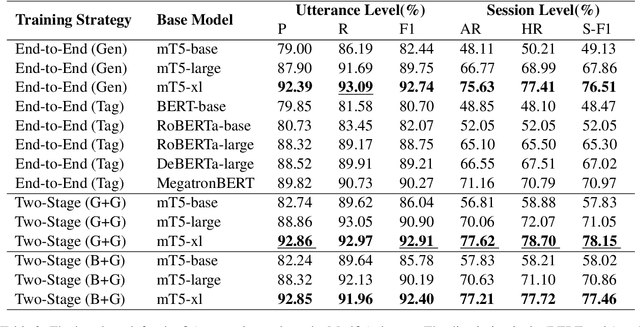
Harvesting question-answer (QA) pairs from customer service chatlog in the wild is an efficient way to enrich the knowledge base for customer service chatbots in the cold start or continuous integration scenarios. Prior work attempts to obtain 1-to-1 QA pairs from growing customer service chatlog, which fails to integrate the incomplete utterances from the dialog context for composite QA retrieval. In this paper, we propose N-to-N QA extraction task in which the derived questions and corresponding answers might be separated across different utterances. We introduce a suite of generative/discriminative tagging based methods with end-to-end and two-stage variants that perform well on 5 customer service datasets and for the first time setup a benchmark for N-to-N DialogQAE with utterance and session level evaluation metrics. With a deep dive into extracted QA pairs, we find that the relations between and inside the QA pairs can be indicators to analyze the dialogue structure, e.g. information seeking, clarification, barge-in and elaboration. We also show that the proposed models can adapt to different domains and languages, and reduce the labor cost of knowledge accumulation in the real-world product dialogue platform.
Multiclass classification utilising an estimated algorithmic probability prior
Dec 14, 2022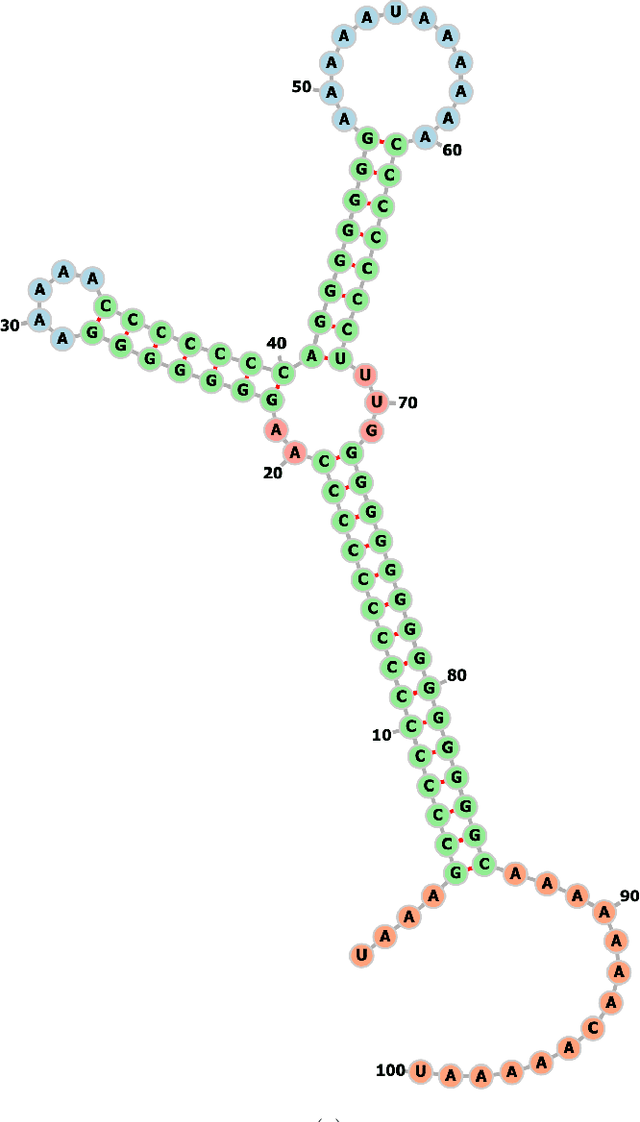
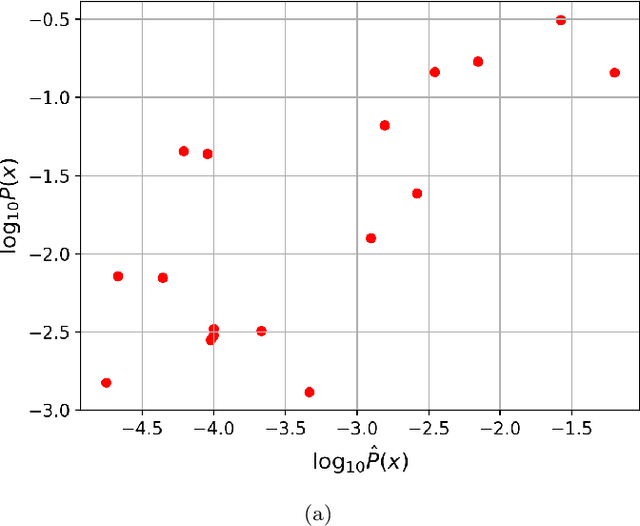
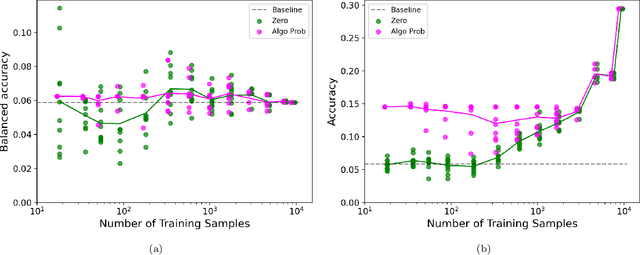
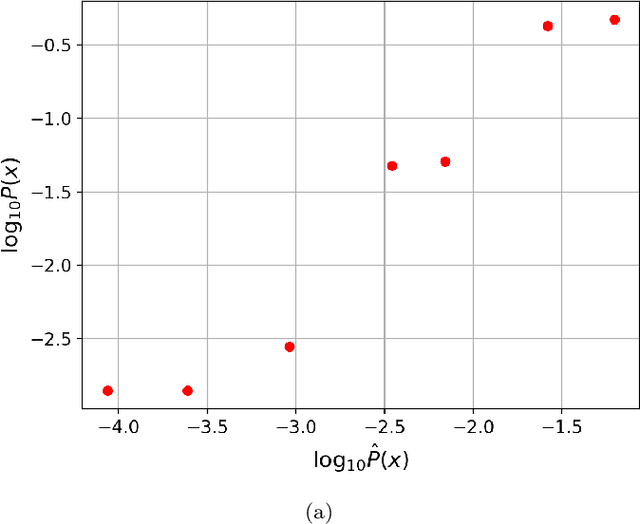
Methods of pattern recognition and machine learning are applied extensively in science, technology, and society. Hence, any advances in related theory may translate into large-scale impact. Here we explore how algorithmic information theory, especially algorithmic probability, may aid in a machine learning task. We study a multiclass supervised classification problem, namely learning the RNA molecule sequence-to-shape map, where the different possible shapes are taken to be the classes. The primary motivation for this work is a proof of concept example, where a concrete, well-motivated machine learning task can be aided by approximations to algorithmic probability. Our approach is based on directly estimating the class (i.e., shape) probabilities from shape complexities, and using the estimated probabilities as a prior in a Gaussian process learning problem. Naturally, with a large amount of training data, the prior has no significant influence on classification accuracy, but in the very small training data regime, we show that using the prior can substantially improve classification accuracy. To our knowledge, this work is one of the first to demonstrate how algorithmic probability can aid in a concrete, real-world, machine learning problem.
Learning useful representations for shifting tasks and distributions
Dec 14, 2022

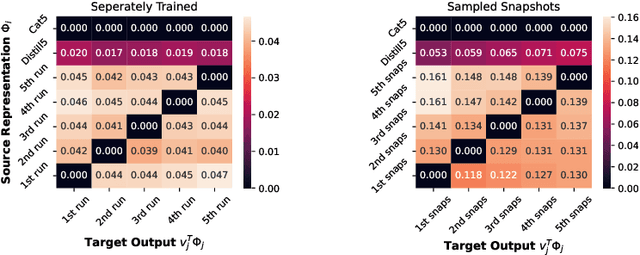
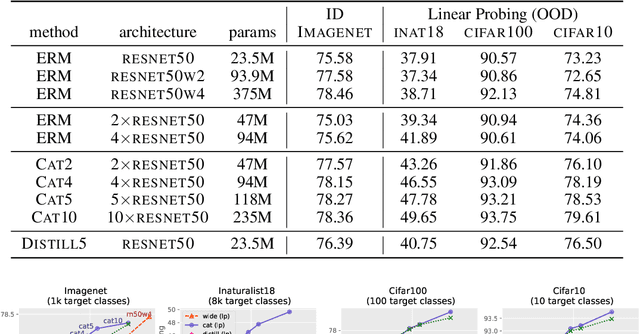
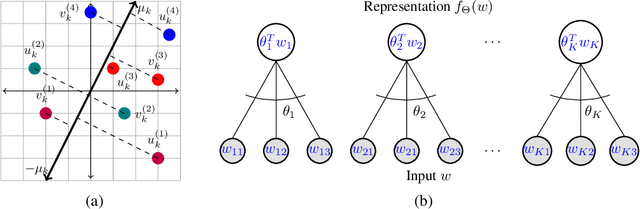
Does the dominant approach to learn representations (as a side effect of optimizing an expected cost for a single training distribution) remain a good approach when we are dealing with multiple distributions. Our thesis is that such scenarios are better served by representations that are "richer" than those obtained with a single optimization episode. This is supported by a collection of empirical results obtained with an apparently na\"ive ensembling technique: concatenating the representations obtained with multiple training episodes using the same data, model, algorithm, and hyper-parameters, but different random seeds. These independently trained networks perform similarly. Yet, in a number of scenarios involving new distributions, the concatenated representation performs substantially better than an equivalently sized network trained from scratch. This proves that the representations constructed by multiple training episodes are in fact different. Although their concatenation carries little additional information about the training task under the training distribution, it becomes substantially more informative when tasks or distributions change. Meanwhile, a single training episode is unlikely to yield such a redundant representation because the optimization process has no reason to accumulate features that do not incrementally improve the training performance.
Dynamic Event-Triggered Discrete-Time Linear Time-Varying System with Privacy-Preservation
Oct 28, 2022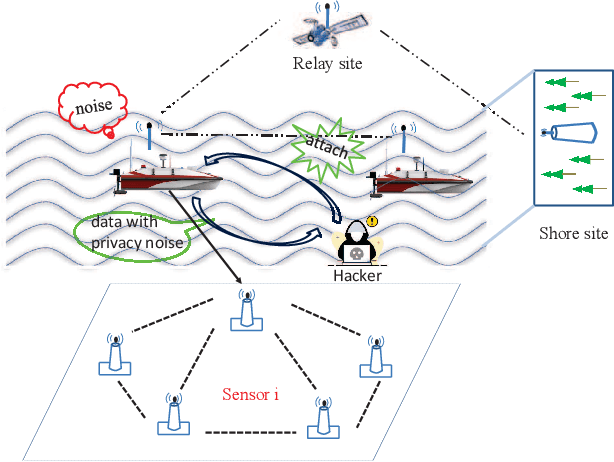
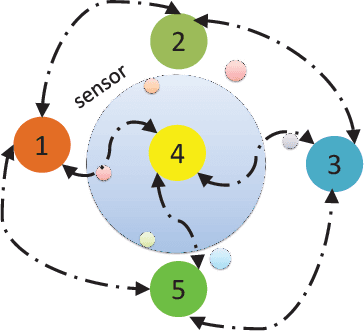
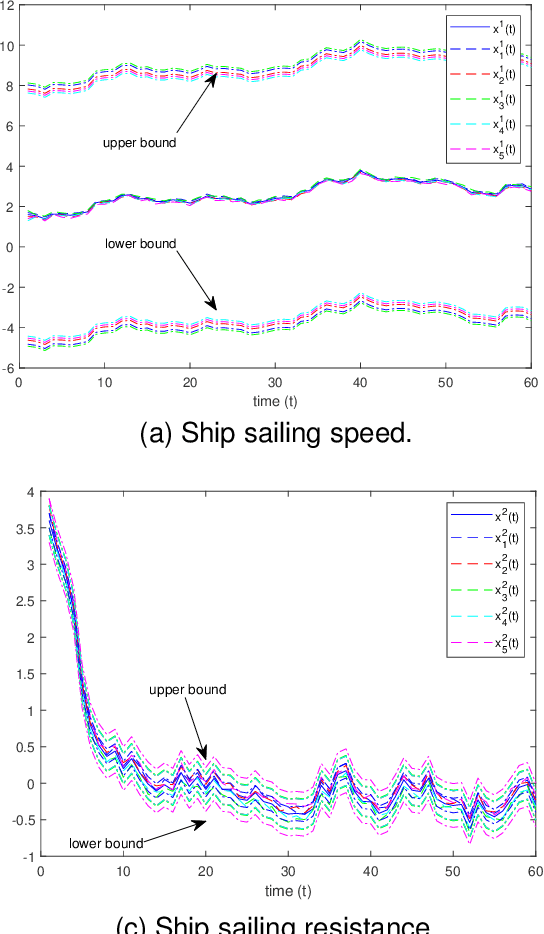
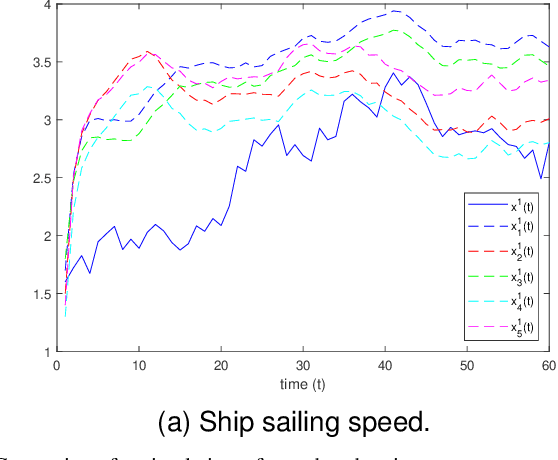
This paper focuses on discrete-time wireless sensor networks with privacy-preservation. In practical applications, information exchange between sensors is subject to attacks. For the information leakage caused by the attack during the information transmission process, privacy-preservation is introduced for system states. To make communication resources more effectively utilized, a dynamic event-triggered set-membership estimator is designed. Moreover, the privacy of the system is analyzed to ensure the security of the real data. As a result, the set-membership estimator with differential privacy is analyzed using recursive convex optimization. Then the steady-state performance of the system is studied. Finally, one example is presented to demonstrate the feasibility of the proposed distributed filter containing privacy-preserving analysis.
Learning to Play Trajectory Games Against Opponents with Unknown Objectives
Dec 16, 2022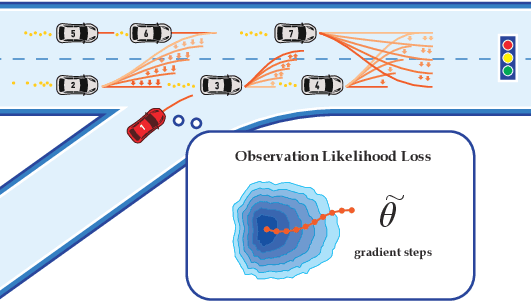
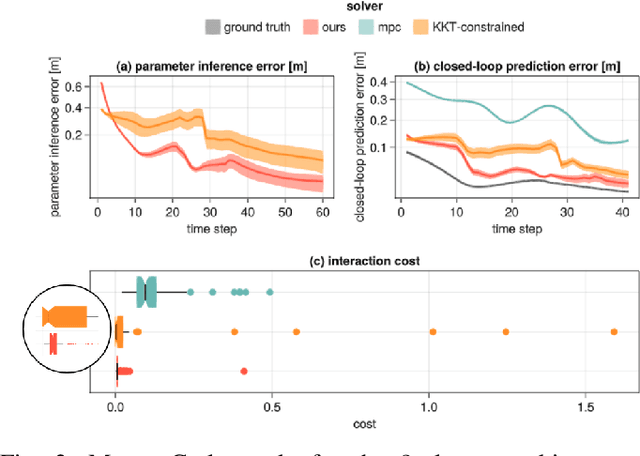
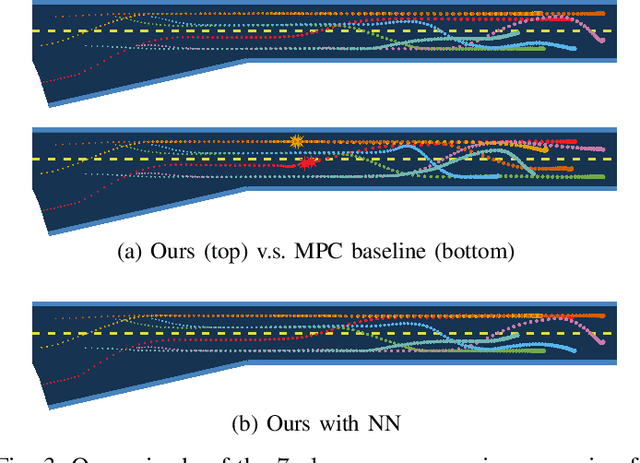
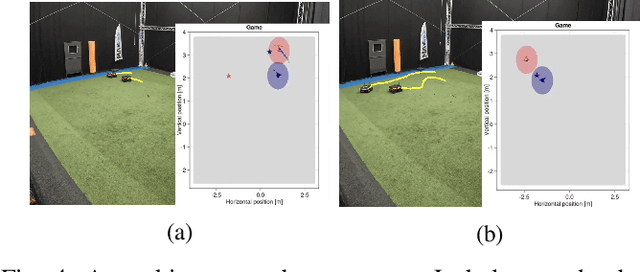
Many autonomous agents, such as intelligent vehicles, are inherently required to interact with one another. Game theory provides a natural mathematical tool for robot motion planning in such interactive settings. However, tractable algorithms for such problems usually rely on a strong assumption, namely that the objectives of all players in the scene are known. To make such tools applicable for ego-centric planning with only local information, we propose an adaptive model-predictive game solver, which jointly infers other players' objectives online and computes a corresponding generalized Nash equilibrium (GNE) strategy. The adaptivity of our approach is enabled by a differentiable trajectory game solver whose gradient signal is used for maximum likelihood estimation (MLE) of opponents' objectives. This differentiability of our pipeline facilitates direct integration with other differentiable elements, such as neural networks (NNs). Furthermore, in contrast to existing solvers for cost inference in games, our method handles not only partial state observations but also general inequality constraints. In two simulated traffic scenarios, we find superior performance of our approach over both existing game-theoretic methods and non-game-theoretic model-predictive control (MPC) approaches. We also demonstrate our approach's real-time planning capabilities and robustness in two hardware experiments.
Feature Dropout: Revisiting the Role of Augmentations in Contrastive Learning
Dec 16, 2022


What role do augmentations play in contrastive learning? Recent work suggests that good augmentations are label-preserving with respect to a specific downstream task. We complicate this picture by showing that label-destroying augmentations can be useful in the foundation model setting, where the goal is to learn diverse, general-purpose representations for multiple downstream tasks. We perform contrastive learning experiments on a range of image and audio datasets with multiple downstream tasks (e.g. for digits superimposed on photographs, predicting the class of one vs. the other). We find that Viewmaker Networks, a recently proposed model for learning augmentations for contrastive learning, produce label-destroying augmentations that stochastically destroy features needed for different downstream tasks. These augmentations are interpretable (e.g. altering shapes, digits, or letters added to images) and surprisingly often result in better performance compared to expert-designed augmentations, despite not preserving label information. To support our empirical results, we theoretically analyze a simple contrastive learning setting with a linear model. In this setting, label-destroying augmentations are crucial for preventing one set of features from suppressing the learning of features useful for another downstream task. Our results highlight the need for analyzing the interaction between multiple downstream tasks when trying to explain the success of foundation models.