 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTOPReward: Token Probabilities as Hidden Zero-Shot Rewards for Robotics
Feb 22, 2026While Vision-Language-Action (VLA) models have seen rapid progress in pretraining, their advancement in Reinforcement Learning (RL) remains hampered by low sample efficiency and sparse rewards in real-world settings. Developing generalizable process reward models is essential for providing the fine-grained feedback necessary to bridge this gap, yet existing temporal value functions often fail to generalize beyond their training domains. We introduce TOPReward, a novel, probabilistically grounded temporal value function that leverages the latent world knowledge of pretrained video Vision-Language Models (VLMs) to estimate robotic task progress. Unlike prior methods that prompt VLMs to directly output progress values, which are prone to numerical misrepresentation, TOPReward extracts task progress directly from the VLM's internal token logits. In zero-shot evaluations across 130+ distinct real-world tasks and multiple robot platforms (e.g., Franka, YAM, SO-100/101), TOPReward achieves 0.947 mean Value-Order Correlation (VOC) on Qwen3-VL, dramatically outperforming the state-of-the-art GVL baseline which achieves near-zero correlation on the same open-source model. We further demonstrate that TOPReward serves as a versatile tool for downstream applications, including success detection and reward-aligned behavior cloning.
Molmo2: Open Weights and Data for Vision-Language Models with Video Understanding and Grounding
Jan 15, 2026Today's strongest video-language models (VLMs) remain proprietary. The strongest open-weight models either rely on synthetic data from proprietary VLMs, effectively distilling from them, or do not disclose their training data or recipe. As a result, the open-source community lacks the foundations needed to improve on the state-of-the-art video (and image) language models. Crucially, many downstream applications require more than just high-level video understanding; they require grounding -- either by pointing or by tracking in pixels. Even proprietary models lack this capability. We present Molmo2, a new family of VLMs that are state-of-the-art among open-source models and demonstrate exceptional new capabilities in point-driven grounding in single image, multi-image, and video tasks. Our key contribution is a collection of 7 new video datasets and 2 multi-image datasets, including a dataset of highly detailed video captions for pre-training, a free-form video Q&A dataset for fine-tuning, a new object tracking dataset with complex queries, and an innovative new video pointing dataset, all collected without the use of closed VLMs. We also present a training recipe for this data utilizing an efficient packing and message-tree encoding scheme, and show bi-directional attention on vision tokens and a novel token-weight strategy improves performance. Our best-in-class 8B model outperforms others in the class of open weight and data models on short videos, counting, and captioning, and is competitive on long-videos. On video-grounding Molmo2 significantly outperforms existing open-weight models like Qwen3-VL (35.5 vs 29.6 accuracy on video counting) and surpasses proprietary models like Gemini 3 Pro on some tasks (38.4 vs 20.0 F1 on video pointing and 56.2 vs 41.1 J&F on video tracking).
PhysGen: Rigid-Body Physics-Grounded Image-to-Video Generation
Sep 27, 2024We present PhysGen, a novel image-to-video generation method that converts a single image and an input condition (e.g., force and torque applied to an object in the image) to produce a realistic, physically plausible, and temporally consistent video. Our key insight is to integrate model-based physical simulation with a data-driven video generation process, enabling plausible image-space dynamics. At the heart of our system are three core components: (i) an image understanding module that effectively captures the geometry, materials, and physical parameters of the image; (ii) an image-space dynamics simulation model that utilizes rigid-body physics and inferred parameters to simulate realistic behaviors; and (iii) an image-based rendering and refinement module that leverages generative video diffusion to produce realistic video footage featuring the simulated motion. The resulting videos are realistic in both physics and appearance and are even precisely controllable, showcasing superior results over existing data-driven image-to-video generation works through quantitative comparison and comprehensive user study. PhysGen's resulting videos can be used for various downstream applications, such as turning an image into a realistic animation or allowing users to interact with the image and create various dynamics. Project page: https://stevenlsw.github.io/physgen/
Apple Intelligence Foundation Language Models
Jul 29, 2024



We present foundation language models developed to power Apple Intelligence features, including a ~3 billion parameter model designed to run efficiently on devices and a large server-based language model designed for Private Cloud Compute. These models are designed to perform a wide range of tasks efficiently, accurately, and responsibly. This report describes the model architecture, the data used to train the model, the training process, how the models are optimized for inference, and the evaluation results. We highlight our focus on Responsible AI and how the principles are applied throughout the model development.
NeRFDeformer: NeRF Transformation from a Single View via 3D Scene Flows
Jun 15, 2024We present a method for automatically modifying a NeRF representation based on a single observation of a non-rigid transformed version of the original scene. Our method defines the transformation as a 3D flow, specifically as a weighted linear blending of rigid transformations of 3D anchor points that are defined on the surface of the scene. In order to identify anchor points, we introduce a novel correspondence algorithm that first matches RGB-based pairs, then leverages multi-view information and 3D reprojection to robustly filter false positives in two steps. We also introduce a new dataset for exploring the problem of modifying a NeRF scene through a single observation. Our dataset ( https://github.com/nerfdeformer/nerfdeformer ) contains 113 synthetic scenes leveraging 47 3D assets. We show that our proposed method outperforms NeRF editing methods as well as diffusion-based methods, and we also explore different methods for filtering correspondences.
GoMAvatar: Efficient Animatable Human Modeling from Monocular Video Using Gaussians-on-Mesh
Apr 11, 2024We introduce GoMAvatar, a novel approach for real-time, memory-efficient, high-quality animatable human modeling. GoMAvatar takes as input a single monocular video to create a digital avatar capable of re-articulation in new poses and real-time rendering from novel viewpoints, while seamlessly integrating with rasterization-based graphics pipelines. Central to our method is the Gaussians-on-Mesh representation, a hybrid 3D model combining rendering quality and speed of Gaussian splatting with geometry modeling and compatibility of deformable meshes. We assess GoMAvatar on ZJU-MoCap data and various YouTube videos. GoMAvatar matches or surpasses current monocular human modeling algorithms in rendering quality and significantly outperforms them in computational efficiency (43 FPS) while being memory-efficient (3.63 MB per subject).
StableDreamer: Taming Noisy Score Distillation Sampling for Text-to-3D
Dec 02, 2023



In the realm of text-to-3D generation, utilizing 2D diffusion models through score distillation sampling (SDS) frequently leads to issues such as blurred appearances and multi-faced geometry, primarily due to the intrinsically noisy nature of the SDS loss. Our analysis identifies the core of these challenges as the interaction among noise levels in the 2D diffusion process, the architecture of the diffusion network, and the 3D model representation. To overcome these limitations, we present StableDreamer, a methodology incorporating three advances. First, inspired by InstructNeRF2NeRF, we formalize the equivalence of the SDS generative prior and a simple supervised L2 reconstruction loss. This finding provides a novel tool to debug SDS, which we use to show the impact of time-annealing noise levels on reducing multi-faced geometries. Second, our analysis shows that while image-space diffusion contributes to geometric precision, latent-space diffusion is crucial for vivid color rendition. Based on this observation, StableDreamer introduces a two-stage training strategy that effectively combines these aspects, resulting in high-fidelity 3D models. Third, we adopt an anisotropic 3D Gaussians representation, replacing Neural Radiance Fields (NeRFs), to enhance the overall quality, reduce memory usage during training, and accelerate rendering speeds, and better capture semi-transparent objects. StableDreamer reduces multi-face geometries, generates fine details, and converges stably.
CASA: Category-agnostic Skeletal Animal Reconstruction
Nov 04, 2022



Recovering the skeletal shape of an animal from a monocular video is a longstanding challenge. Prevailing animal reconstruction methods often adopt a control-point driven animation model and optimize bone transforms individually without considering skeletal topology, yielding unsatisfactory shape and articulation. In contrast, humans can easily infer the articulation structure of an unknown animal by associating it with a seen articulated character in their memory. Inspired by this fact, we present CASA, a novel Category-Agnostic Skeletal Animal reconstruction method consisting of two major components: a video-to-shape retrieval process and a neural inverse graphics framework. During inference, CASA first retrieves an articulated shape from a 3D character assets bank so that the input video scores highly with the rendered image, according to a pretrained language-vision model. CASA then integrates the retrieved character into an inverse graphics framework and jointly infers the shape deformation, skeleton structure, and skinning weights through optimization. Experiments validate the efficacy of CASA regarding shape reconstruction and articulation. We further demonstrate that the resulting skeletal-animated characters can be used for re-animation.
Occupancy Planes for Single-view RGB-D Human Reconstruction
Aug 04, 2022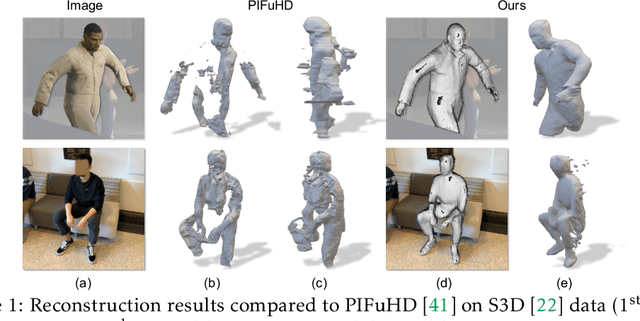
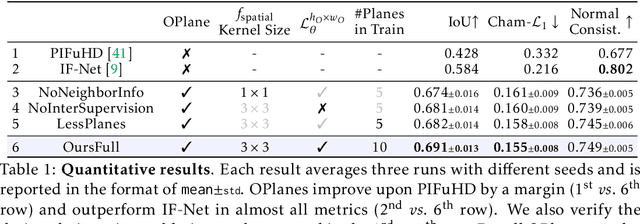
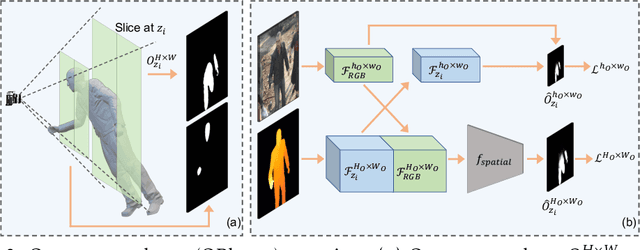
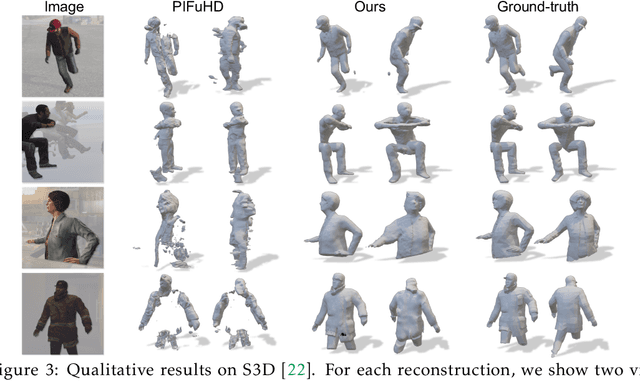
Single-view RGB-D human reconstruction with implicit functions is often formulated as per-point classification. Specifically, a set of 3D locations within the view-frustum of the camera are first projected independently onto the image and a corresponding feature is subsequently extracted for each 3D location. The feature of each 3D location is then used to classify independently whether the corresponding 3D point is inside or outside the observed object. This procedure leads to sub-optimal results because correlations between predictions for neighboring locations are only taken into account implicitly via the extracted features. For more accurate results we propose the occupancy planes (OPlanes) representation, which enables to formulate single-view RGB-D human reconstruction as occupancy prediction on planes which slice through the camera's view frustum. Such a representation provides more flexibility than voxel grids and enables to better leverage correlations than per-point classification. On the challenging S3D data we observe a simple classifier based on the OPlanes representation to yield compelling results, especially in difficult situations with partial occlusions due to other objects and partial visibility, which haven't been addressed by prior work.
Neural Volumetric Object Selection
May 30, 2022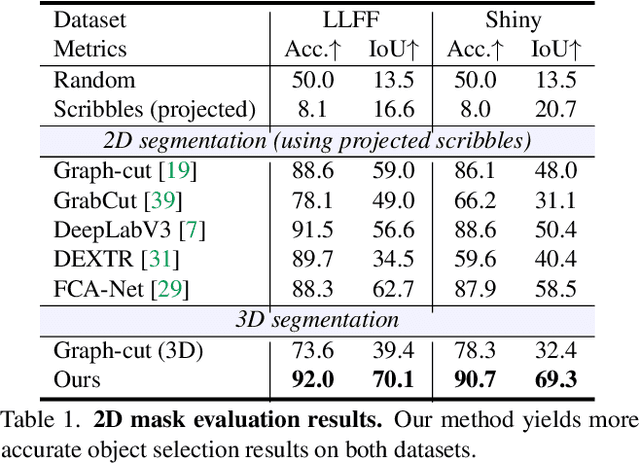
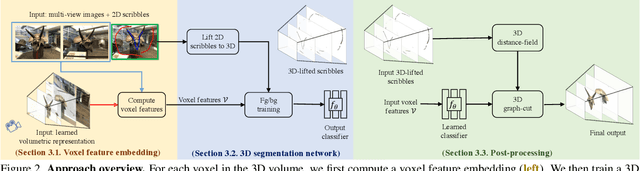
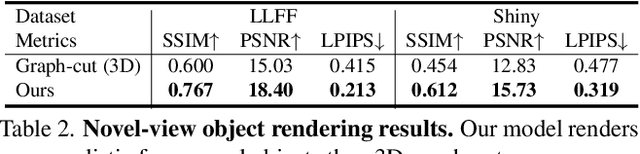
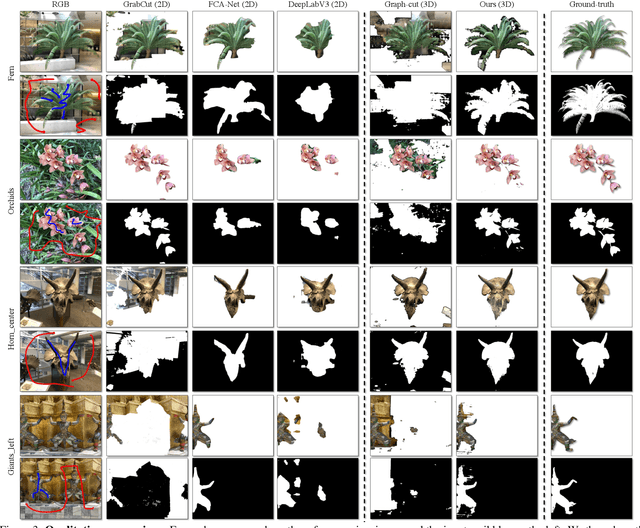
We introduce an approach for selecting objects in neural volumetric 3D representations, such as multi-plane images (MPI) and neural radiance fields (NeRF). Our approach takes a set of foreground and background 2D user scribbles in one view and automatically estimates a 3D segmentation of the desired object, which can be rendered into novel views. To achieve this result, we propose a novel voxel feature embedding that incorporates the neural volumetric 3D representation and multi-view image features from all input views. To evaluate our approach, we introduce a new dataset of human-provided segmentation masks for depicted objects in real-world multi-view scene captures. We show that our approach out-performs strong baselines, including 2D segmentation and 3D segmentation approaches adapted to our task.