 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStableDreamer: Taming Noisy Score Distillation Sampling for Text-to-3D
Dec 02, 2023



In the realm of text-to-3D generation, utilizing 2D diffusion models through score distillation sampling (SDS) frequently leads to issues such as blurred appearances and multi-faced geometry, primarily due to the intrinsically noisy nature of the SDS loss. Our analysis identifies the core of these challenges as the interaction among noise levels in the 2D diffusion process, the architecture of the diffusion network, and the 3D model representation. To overcome these limitations, we present StableDreamer, a methodology incorporating three advances. First, inspired by InstructNeRF2NeRF, we formalize the equivalence of the SDS generative prior and a simple supervised L2 reconstruction loss. This finding provides a novel tool to debug SDS, which we use to show the impact of time-annealing noise levels on reducing multi-faced geometries. Second, our analysis shows that while image-space diffusion contributes to geometric precision, latent-space diffusion is crucial for vivid color rendition. Based on this observation, StableDreamer introduces a two-stage training strategy that effectively combines these aspects, resulting in high-fidelity 3D models. Third, we adopt an anisotropic 3D Gaussians representation, replacing Neural Radiance Fields (NeRFs), to enhance the overall quality, reduce memory usage during training, and accelerate rendering speeds, and better capture semi-transparent objects. StableDreamer reduces multi-face geometries, generates fine details, and converges stably.
Vision-Only Robot Navigation in a Neural Radiance World
Oct 01, 2021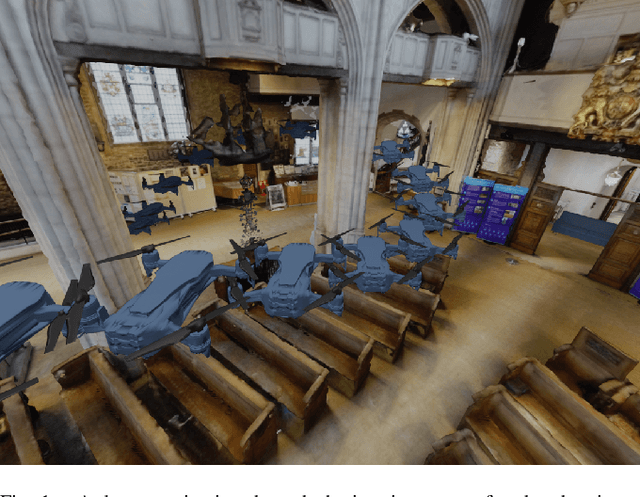
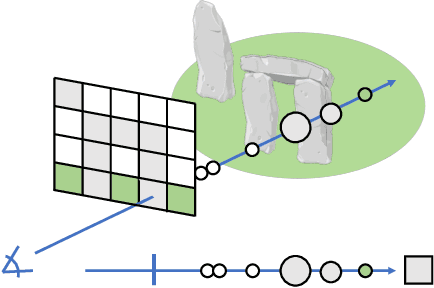
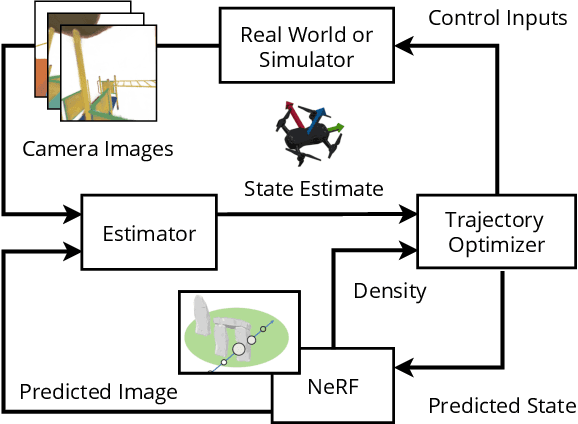
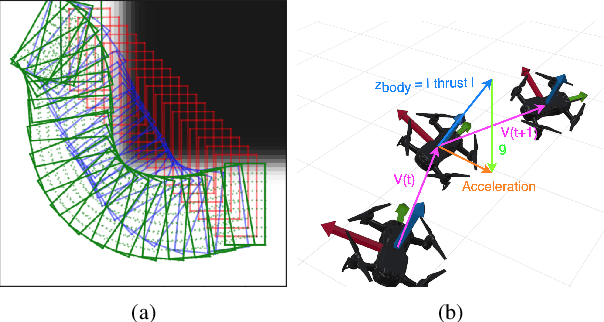
Neural Radiance Fields (NeRFs) have recently emerged as a powerful paradigm for the representation of natural, complex 3D scenes. NeRFs represent continuous volumetric density and RGB values in a neural network, and generate photo-realistic images from unseen camera viewpoints through ray tracing. We propose an algorithm for navigating a robot through a 3D environment represented as a NeRF using only an on-board RGB camera for localization. We assume the NeRF for the scene has been pre-trained offline, and the robot's objective is to navigate through unoccupied space in the NeRF to reach a goal pose. We introduce a trajectory optimization algorithm that avoids collisions with high-density regions in the NeRF based on a discrete time version of differential flatness that is amenable to constraining the robot's full pose and control inputs. We also introduce an optimization based filtering method to estimate 6DoF pose and velocities for the robot in the NeRF given only an onboard RGB camera. We combine the trajectory planner with the pose filter in an online replanning loop to give a vision-based robot navigation pipeline. We present simulation results with a quadrotor robot navigating through a jungle gym environment, the inside of a church, and Stonehenge using only an RGB camera. We also demonstrate an omnidirectional ground robot navigating through the church, requiring it to reorient to fit through the narrow gap. Videos of this work can be found at https://mikh3x4.github.io/nerf-navigation/ .
MSL-RAPTOR: A 6DoF Relative Pose Tracker for Onboard Robotic Perception
Dec 16, 2020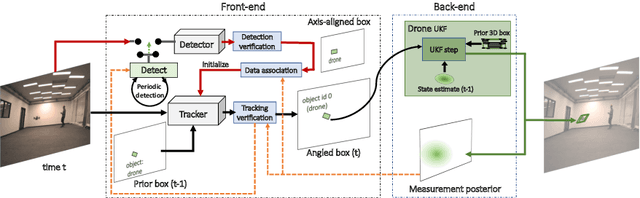
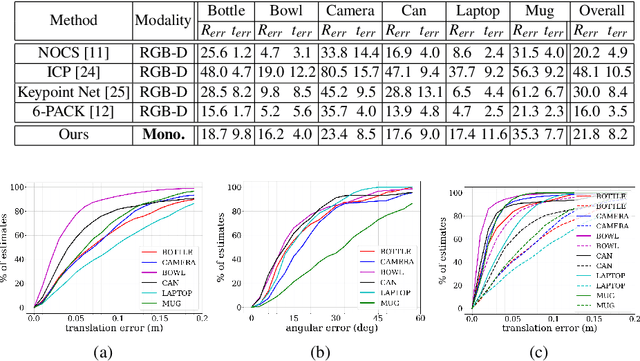
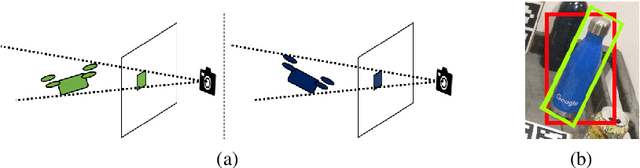
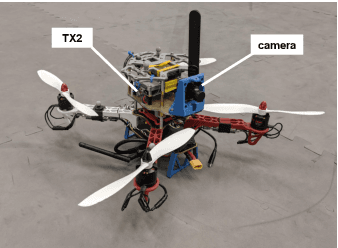
Determining the relative position and orientation of objects in an environment is a fundamental building block for a wide range of robotics applications. To accomplish this task efficiently in practical settings, a method must be fast, use common sensors, and generalize easily to new objects and environments. We present MSL-RAPTOR, a two-stage algorithm for tracking a rigid body with a monocular camera. The image is first processed by an efficient neural network-based front-end to detect new objects and track 2D bounding boxes between frames. The class label and bounding box is passed to the back-end that updates the object's pose using an unscented Kalman filter (UKF). The measurement posterior is fed back to the 2D tracker to improve robustness. The object's class is identified so a class-specific UKF can be used if custom dynamics and constraints are known. Adapting to track the pose of new classes only requires providing a trained 2D object detector or labeled 2D bounding box data, as well as the approximate size of the objects. The performance of MSL-RAPTOR is first verified on the NOCS-REAL275 dataset, achieving results comparable to RGB-D approaches despite not using depth measurements. When tracking a flying drone from onboard another drone, it outperforms the fastest comparable method in speed by a factor of 3, while giving lower translation and rotation median errors by 66% and 23% respectively.