 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiOSPointMapper: RealTime Pedestrian and Accessibility Mapping with Mobile AI
Dec 26, 2025Accurate, up-to-date sidewalk data is essential for building accessible and inclusive pedestrian infrastructure, yet current approaches to data collection are often costly, fragmented, and difficult to scale. We introduce iOSPointMapper, a mobile application that enables real-time, privacy-conscious sidewalk mapping on the ground, using recent-generation iPhones and iPads. The system leverages on-device semantic segmentation, LiDAR-based depth estimation, and fused GPS/IMU data to detect and localize sidewalk-relevant features such as traffic signs, traffic lights and poles. To ensure transparency and improve data quality, iOSPointMapper incorporates a user-guided annotation interface for validating system outputs before submission. Collected data is anonymized and transmitted to the Transportation Data Exchange Initiative (TDEI), where it integrates seamlessly with broader multimodal transportation datasets. Detailed evaluations of the system's feature detection and spatial mapping performance reveal the application's potential for enhanced pedestrian mapping. Together, these capabilities offer a scalable and user-centered approach to closing critical data gaps in pedestrian
Step-DeepResearch Technical Report
Dec 24, 2025As LLMs shift toward autonomous agents, Deep Research has emerged as a pivotal metric. However, existing academic benchmarks like BrowseComp often fail to meet real-world demands for open-ended research, which requires robust skills in intent recognition, long-horizon decision-making, and cross-source verification. To address this, we introduce Step-DeepResearch, a cost-effective, end-to-end agent. We propose a Data Synthesis Strategy Based on Atomic Capabilities to reinforce planning and report writing, combined with a progressive training path from agentic mid-training to SFT and RL. Enhanced by a Checklist-style Judger, this approach significantly improves robustness. Furthermore, to bridge the evaluation gap in the Chinese domain, we establish ADR-Bench for realistic deep research scenarios. Experimental results show that Step-DeepResearch (32B) scores 61.4% on Scale AI Research Rubrics. On ADR-Bench, it significantly outperforms comparable models and rivals SOTA closed-source models like OpenAI and Gemini DeepResearch. These findings prove that refined training enables medium-sized models to achieve expert-level capabilities at industry-leading cost-efficiency.
TokenSqueeze: Performance-Preserving Compression for Reasoning LLMs
Nov 17, 2025Emerging reasoning LLMs such as OpenAI-o1 and DeepSeek-R1 have achieved strong performance on complex reasoning tasks by generating long chain-of-thought (CoT) traces. However, these long CoTs result in increased token usage, leading to higher inference latency and memory consumption. As a result, balancing accuracy and reasoning efficiency has become essential for deploying reasoning LLMs in practical applications. Existing long-to-short (Long2Short) methods aim to reduce inference length but often sacrifice accuracy, revealing a need for an approach that maintains performance while lowering token costs. To address this efficiency-accuracy tradeoff, we propose TokenSqueeze, a novel Long2Short method that condenses reasoning paths while preserving performance and relying exclusively on self-generated data. First, to prevent performance degradation caused by excessive compression of reasoning depth, we propose to select self-generated samples whose reasoning depth is adaptively matched to the complexity of the problem. To further optimize the linguistic expression without altering the underlying reasoning paths, we introduce a distribution-aligned linguistic refinement method that enhances the clarity and conciseness of the reasoning path while preserving its logical integrity. Comprehensive experimental results demonstrate the effectiveness of TokenSqueeze in reducing token usage while maintaining accuracy. Notably, DeepSeek-R1-Distill-Qwen-7B fine-tuned using our proposed method achieved a 50\% average token reduction while preserving accuracy on the MATH500 benchmark. TokenSqueeze exclusively utilizes the model's self-generated data, enabling efficient and high-fidelity reasoning without relying on manually curated short-answer datasets across diverse applications. Our code is available at https://github.com/zhangyx1122/TokenSqueeze.
A Novel Multi-Reference-Point Modeling Framework for Monostatic Background Channel: Toward 3GPP ISAC Standardization
Nov 05, 2025Integrated Sensing and Communication (ISAC) has been identified as a key 6G application by ITU and 3GPP. A realistic, standard-compatible channel model is essential for ISAC system design. To characterize the impact of Sensing Targets (STs), 3GPP defines ISAC channel as a combination of target and background channels, comprising multipath components related to STs and those originating solely from the environment, respectively. Although the background channel does not carry direct ST information, its accurate modeling is critical for evaluating sensing performance, especially in complex environments. Existing communication standards characterize propagation between separated transmitter (Tx) and receiver (Rx). However, modeling background channels in the ISAC monostatic mode, where the Tx and Rx are co-located, remains a pressing challenge. In this paper, we firstly conduct ISAC monostatic background channel measurements for an indoor scenario at 28 GHz. Realistic channel parameters are extracted, revealing pronounced single-hop propagation and discrete multipath distribution. Inspired by these properties, a novel stochastic model is proposed to characterizing the ISAC monostatic background channel as the superposition of sub-channels between the monostatic Tx&Rx and multiple communication Rx-like Reference Points (RPs). This model is compatible with standardizations, and a 3GPP-extended implementation framework is introduced. Finally, a genetic algorithm-based method is proposed to extract the optimal number and placement of multi-RPs. The optimization approach and modeling framework are validated by comparing measured and simulated channel parameters. Results demonstrate that the proposed model effectively captures monostatic background channel characteristics, addresses a critical gap in ISAC channel modeling, and supports 6G standardization.
PORTool: Tool-Use LLM Training with Rewarded Tree
Oct 29, 2025Current tool-use large language models (LLMs) are trained on static datasets, enabling them to interact with external tools and perform multi-step, tool-integrated reasoning, which produces tool-call trajectories. However, these models imitate how a query is resolved in a generic tool-call routine, thereby failing to explore possible solutions and demonstrating limited performance in an evolved, dynamic tool-call environment. In this work, we propose PORTool, a reinforcement learning (RL) method that encourages a tool-use LLM to explore various trajectories yielding the correct answer. Specifically, this method starts with generating multiple rollouts for a given query, and some of them share the first few tool-call steps, thereby forming a tree-like structure. Next, we assign rewards to each step, based on its ability to produce a correct answer and make successful tool calls. A shared step across different trajectories receives the same reward, while different steps under the same fork receive different rewards. Finally, these step-wise rewards are used to calculate fork-relative advantages, blended with trajectory-relative advantages, to train the LLM for tool use. The experiments utilize 17 tools to address user queries, covering both time-sensitive and time-invariant topics. We conduct ablation studies to systematically justify the necessity and the design robustness of step-wise rewards. Furthermore, we compare the proposed PORTool with other training approaches and demonstrate significant improvements in final accuracy and the number of tool-call steps.
Memory as Action: Autonomous Context Curation for Long-Horizon Agentic Tasks
Oct 14, 2025



Large Language Models face challenges in long-horizon agentic tasks as their constrained memory is easily overwhelmed by distracting or irrelevant context. Existing working memory methods typically rely on external, heuristic mechanisms that are decoupled from the agent's core policy. In this work, we reframe working memory management as a learnable, intrinsic capability. We propose a novel framework, Memory-as-Action, where an agent actively manages its working memory by executing explicit editing operations as part of a unified policy. This formulation allows an agent, trained via reinforcement learning, to balance memory curation against long-term task objectives under given resource constraints. However, such memory editing actions break the standard assumption of a continuously growing prefix in LLM interactions, leading to what we call trajectory fractures. These non-prefix changes disrupt the causal continuity required by standard policy gradient methods, making those methods inapplicable. To address this, we propose a new algorithm, Dynamic Context Policy Optimization, which enables stable end-to-end reinforcement learning by segmenting trajectories at memory action points and applying trajectory-level advantages to the resulting action segments. Our results demonstrate that jointly optimizing for task reasoning and memory management in an end-to-end fashion not only reduces overall computational consumption but also improves task performance, driven by adaptive context curation strategies tailored to the model's intrinsic capabilities.
Relative-Absolute Fusion: Rethinking Feature Extraction in Image-Based Iterative Method Selection for Solving Sparse Linear Systems
Oct 01, 2025Iterative method selection is crucial for solving sparse linear systems because these methods inherently lack robustness. Though image-based selection approaches have shown promise, their feature extraction techniques might encode distinct matrices into identical image representations, leading to the same selection and suboptimal method. In this paper, we introduce RAF (Relative-Absolute Fusion), an efficient feature extraction technique to enhance image-based selection approaches. By simultaneously extracting and fusing image representations as relative features with corresponding numerical values as absolute features, RAF achieves comprehensive matrix representations that prevent feature ambiguity across distinct matrices, thus improving selection accuracy and unlocking the potential of image-based selection approaches. We conducted comprehensive evaluations of RAF on SuiteSparse and our developed BMCMat (Balanced Multi-Classification Matrix dataset), demonstrating solution time reductions of 0.08s-0.29s for sparse linear systems, which is 5.86%-11.50% faster than conventional image-based selection approaches and achieves state-of-the-art (SOTA) performance. BMCMat is available at https://github.com/zkqq/BMCMat.
Digital Twin Channel-Aided CSI Prediction: A Environment-based Subspace Extraction Approach for Achieving Low Overhead and Robustness
Aug 07, 2025



To meet the robust and high-speed communication requirements of the sixth-generation (6G) mobile communication system in complex scenarios, sensing- and artificial intelligence (AI)-based digital twin channel (DTC) techniques become a promising approach to reduce system overhead. In this paper, we propose an environment-specific channel subspace basis (EB)-aided partial-to-whole channel state information (CSI) prediction method (EB-P2WCP) for realizing DTC-enabled low-overhead channel prediction. Specifically, EB is utilized to characterize the static properties of the electromagnetic environment, which is extracted from the digital twin map, serving as environmental information prior to the prediction task. Then, we fuse EB with real-time estimated local CSI to predict the entire spatial-frequency domain channel for both the present and future time instances. Hence, an EB-based partial-to-whole CSI prediction network (EB-P2WNet) is designed to achieve a robust channel prediction scheme in various complex scenarios. Simulation results indicate that incorporating EB provides significant benefits under low signal-to-noise ratio and pilot ratio conditions, achieving a reduction of up to 50% in pilot overhead. Additionally, the proposed method maintains robustness against multi-user interference, tolerating 3-meter localization errors with only a 0.5 dB NMSE increase, and predicts CSI for the next channel coherent time within 1.3 milliseconds.
Step-Audio 2 Technical Report
Jul 24, 2025
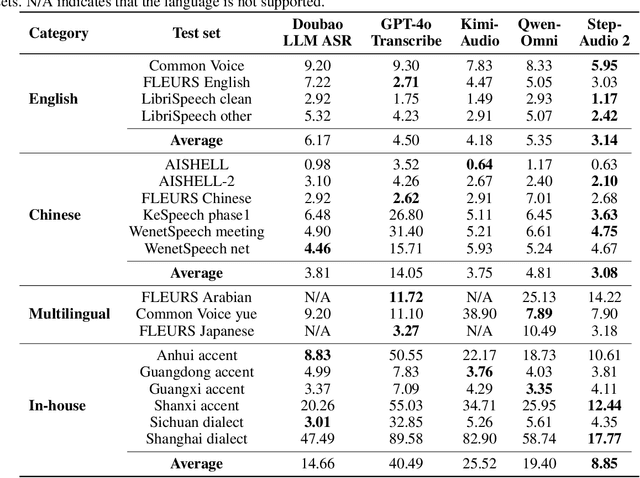

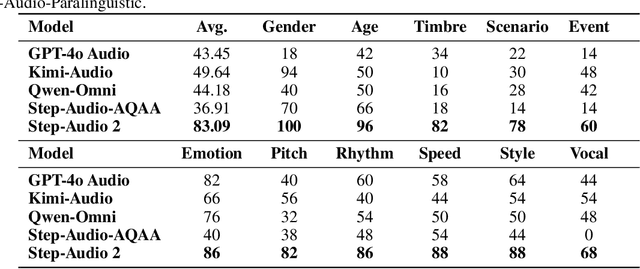
This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.
Cross-domain Hyperspectral Image Classification based on Bi-directional Domain Adaptation
Jul 03, 2025Utilizing hyperspectral remote sensing technology enables the extraction of fine-grained land cover classes. Typically, satellite or airborne images used for training and testing are acquired from different regions or times, where the same class has significant spectral shifts in different scenes. In this paper, we propose a Bi-directional Domain Adaptation (BiDA) framework for cross-domain hyperspectral image (HSI) classification, which focuses on extracting both domain-invariant features and domain-specific information in the independent adaptive space, thereby enhancing the adaptability and separability to the target scene. In the proposed BiDA, a triple-branch transformer architecture (the source branch, target branch, and coupled branch) with semantic tokenizer is designed as the backbone. Specifically, the source branch and target branch independently learn the adaptive space of source and target domains, a Coupled Multi-head Cross-attention (CMCA) mechanism is developed in coupled branch for feature interaction and inter-domain correlation mining. Furthermore, a bi-directional distillation loss is designed to guide adaptive space learning using inter-domain correlation. Finally, we propose an Adaptive Reinforcement Strategy (ARS) to encourage the model to focus on specific generalized feature extraction within both source and target scenes in noise condition. Experimental results on cross-temporal/scene airborne and satellite datasets demonstrate that the proposed BiDA performs significantly better than some state-of-the-art domain adaptation approaches. In the cross-temporal tree species classification task, the proposed BiDA is more than 3\%$\sim$5\% higher than the most advanced method. The codes will be available from the website: https://github.com/YuxiangZhang-BIT/IEEE_TCSVT_BiDA.