 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Literal Mapping: Benchmarking and Improving Non-Literal Translation Evaluation
Jan 12, 2026Large Language Models (LLMs) have significantly advanced Machine Translation (MT), applying them to linguistically complex domains-such as Social Network Services, literature etc. In these scenarios, translations often require handling non-literal expressions, leading to the inaccuracy of MT metrics. To systematically investigate the reliability of MT metrics, we first curate a meta-evaluation dataset focused on non-literal translations, namely MENT. MENT encompasses four non-literal translation domains and features source sentences paired with translations from diverse MT systems, with 7,530 human-annotated scores on translation quality. Experimental results reveal the inaccuracies of traditional MT metrics and the limitations of LLM-as-a-Judge, particularly the knowledge cutoff and score inconsistency problem. To mitigate these limitations, we propose RATE, a novel agentic translation evaluation framework, centered by a reflective Core Agent that dynamically invokes specialized sub-agents. Experimental results indicate the efficacy of RATE, achieving an improvement of at least 3.2 meta score compared with current metrics. Further experiments demonstrate the robustness of RATE to general-domain MT evaluation. Code and dataset are available at: https://github.com/BITHLP/RATE.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025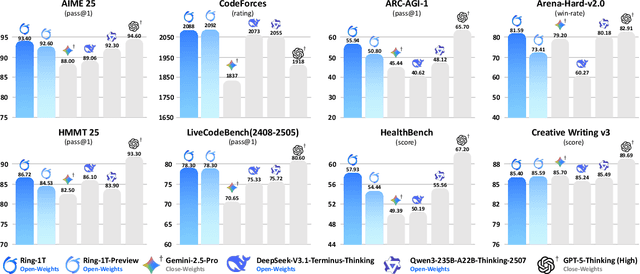
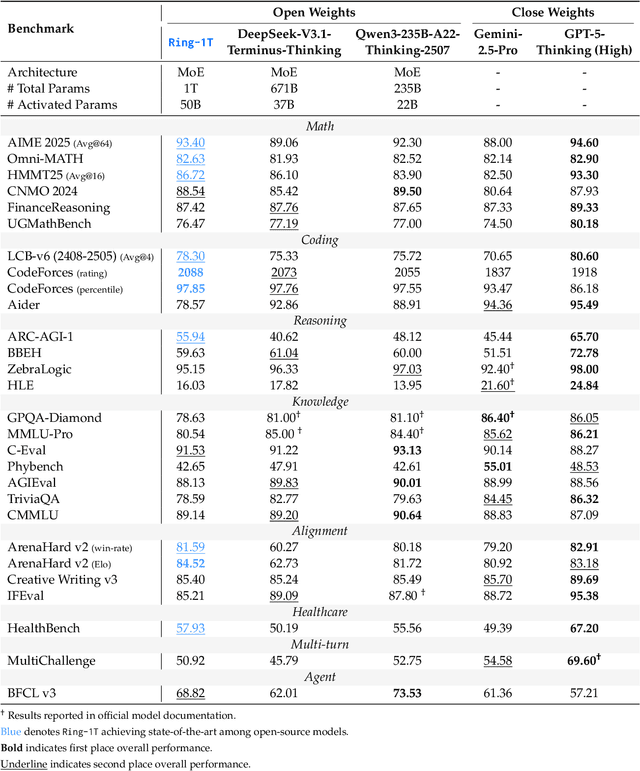
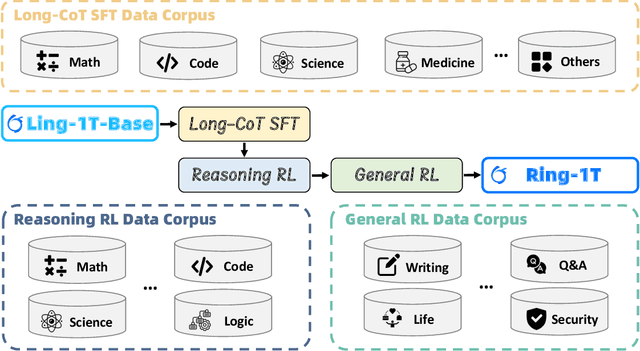
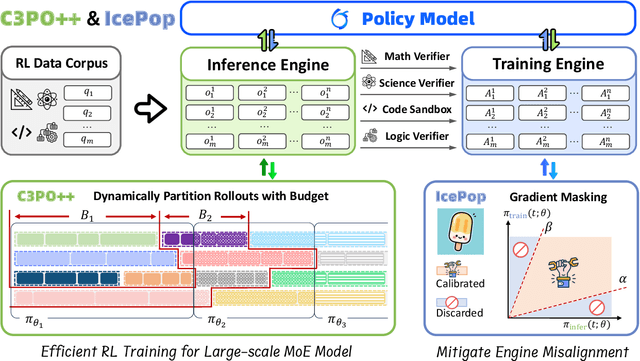
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
GLM-4.5: Agentic, Reasoning, and Coding (ARC) Foundation Models
Aug 08, 2025We present GLM-4.5, an open-source Mixture-of-Experts (MoE) large language model with 355B total parameters and 32B activated parameters, featuring a hybrid reasoning method that supports both thinking and direct response modes. Through multi-stage training on 23T tokens and comprehensive post-training with expert model iteration and reinforcement learning, GLM-4.5 achieves strong performance across agentic, reasoning, and coding (ARC) tasks, scoring 70.1% on TAU-Bench, 91.0% on AIME 24, and 64.2% on SWE-bench Verified. With much fewer parameters than several competitors, GLM-4.5 ranks 3rd overall among all evaluated models and 2nd on agentic benchmarks. We release both GLM-4.5 (355B parameters) and a compact version, GLM-4.5-Air (106B parameters), to advance research in reasoning and agentic AI systems. Code, models, and more information are available at https://github.com/zai-org/GLM-4.5.
Editable-DeepSC: Reliable Cross-Modal Semantic Communications for Facial Editing
Nov 24, 2024



Real-time computer vision (CV) plays a crucial role in various real-world applications, whose performance is highly dependent on communication networks. Nonetheless, the data-oriented characteristics of conventional communications often do not align with the special needs of real-time CV tasks. To alleviate this issue, the recently emerged semantic communications only transmit task-related semantic information and exhibit a promising landscape to address this problem. However, the communication challenges associated with Semantic Facial Editing, one of the most important real-time CV applications on social media, still remain largely unexplored. In this paper, we fill this gap by proposing Editable-DeepSC, a novel cross-modal semantic communication approach for facial editing. Firstly, we theoretically discuss different transmission schemes that separately handle communications and editings, and emphasize the necessity of Joint Editing-Channel Coding (JECC) via iterative attributes matching, which integrates editings into the communication chain to preserve more semantic mutual information. To compactly represent the high-dimensional data, we leverage inversion methods via pre-trained StyleGAN priors for semantic coding. To tackle the dynamic channel noise conditions, we propose SNR-aware channel coding via model fine-tuning. Extensive experiments indicate that Editable-DeepSC can achieve superior editings while significantly saving the transmission bandwidth, even under high-resolution and out-of-distribution (OOD) settings.
MIBench: A Comprehensive Benchmark for Model Inversion Attack and Defense
Oct 07, 2024Model Inversion (MI) attacks aim at leveraging the output information of target models to reconstruct privacy-sensitive training data, raising widespread concerns on privacy threats of Deep Neural Networks (DNNs). Unfortunately, in tandem with the rapid evolution of MI attacks, the lack of a comprehensive, aligned, and reliable benchmark has emerged as a formidable challenge. This deficiency leads to inadequate comparisons between different attack methods and inconsistent experimental setups. In this paper, we introduce the first practical benchmark for model inversion attacks and defenses to address this critical gap, which is named \textit{MIBench}. This benchmark serves as an extensible and reproducible modular-based toolbox and currently integrates a total of 16 state-of-the-art attack and defense methods. Moreover, we furnish a suite of assessment tools encompassing 9 commonly used evaluation protocols to facilitate standardized and fair evaluation and analysis. Capitalizing on this foundation, we conduct extensive experiments from multiple perspectives to holistically compare and analyze the performance of various methods across different scenarios, which overcomes the misalignment issues and discrepancy prevalent in previous works. Based on the collected attack methods and defense strategies, we analyze the impact of target resolution, defense robustness, model predictive power, model architectures, transferability and loss function. Our hope is that this \textit{MIBench} could provide a unified, practical and extensible toolbox and is widely utilized by researchers in the field to rigorously test and compare their novel methods, ensuring equitable evaluations and thereby propelling further advancements in the future development.
One Perturbation is Enough: On Generating Universal Adversarial Perturbations against Vision-Language Pre-training Models
Jun 08, 2024



Vision-Language Pre-training (VLP) models trained on large-scale image-text pairs have demonstrated unprecedented capability in many practical applications. However, previous studies have revealed that VLP models are vulnerable to adversarial samples crafted by a malicious adversary. While existing attacks have achieved great success in improving attack effect and transferability, they all focus on instance-specific attacks that generate perturbations for each input sample. In this paper, we show that VLP models can be vulnerable to a new class of universal adversarial perturbation (UAP) for all input samples. Although initially transplanting existing UAP algorithms to perform attacks showed effectiveness in attacking discriminative models, the results were unsatisfactory when applied to VLP models. To this end, we revisit the multimodal alignments in VLP model training and propose the Contrastive-training Perturbation Generator with Cross-modal conditions (C-PGC). Specifically, we first design a generator that incorporates cross-modal information as conditioning input to guide the training. To further exploit cross-modal interactions, we propose to formulate the training objective as a multimodal contrastive learning paradigm based on our constructed positive and negative image-text pairs. By training the conditional generator with the designed loss, we successfully force the adversarial samples to move away from its original area in the VLP model's feature space, and thus essentially enhance the attacks. Extensive experiments show that our method achieves remarkable attack performance across various VLP models and Vision-and-Language (V+L) tasks. Moreover, C-PGC exhibits outstanding black-box transferability and achieves impressive results in fooling prevalent large VLP models including LLaVA and Qwen-VL.
GI-NAS: Boosting Gradient Inversion Attacks through Adaptive Neural Architecture Search
May 31, 2024Gradient Inversion Attacks invert the transmitted gradients in Federated Learning (FL) systems to reconstruct the sensitive data of local clients and have raised considerable privacy concerns. A majority of gradient inversion methods rely heavily on explicit prior knowledge (e.g., a well pre-trained generative model), which is often unavailable in realistic scenarios. To alleviate this issue, researchers have proposed to leverage the implicit prior knowledge of an over-parameterized network. However, they only utilize a fixed neural architecture for all the attack settings. This would hinder the adaptive use of implicit architectural priors and consequently limit the generalizability. In this paper, we further exploit such implicit prior knowledge by proposing Gradient Inversion via Neural Architecture Search (GI-NAS), which adaptively searches the network and captures the implicit priors behind neural architectures. Extensive experiments verify that our proposed GI-NAS can achieve superior attack performance compared to state-of-the-art gradient inversion methods, even under more practical settings with high-resolution images, large-sized batches, and advanced defense strategies.
Privacy Leakage on DNNs: A Survey of Model Inversion Attacks and Defenses
Feb 06, 2024



Model Inversion (MI) attacks aim to disclose private information about the training data by abusing access to the pre-trained models. These attacks enable adversaries to reconstruct high-fidelity data that closely aligns with the private training data, which has raised significant privacy concerns. Despite the rapid advances in the field, we lack a comprehensive overview of existing MI attacks and defenses. To fill this gap, this paper thoroughly investigates this field and presents a holistic survey. Firstly, our work briefly reviews the traditional MI on machine learning scenarios. We then elaborately analyze and compare numerous recent attacks and defenses on \textbf{D}eep \textbf{N}eural \textbf{N}etworks (DNNs) across multiple modalities and learning tasks.
Mcity Data Collection for Automated Vehicles Study
Dec 12, 2019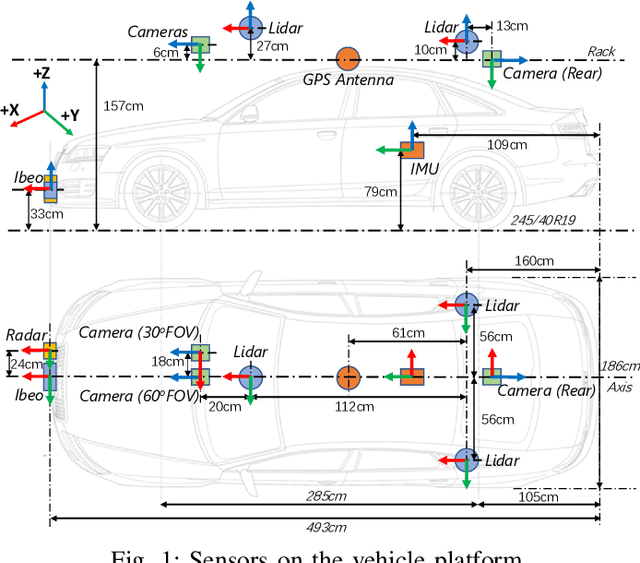
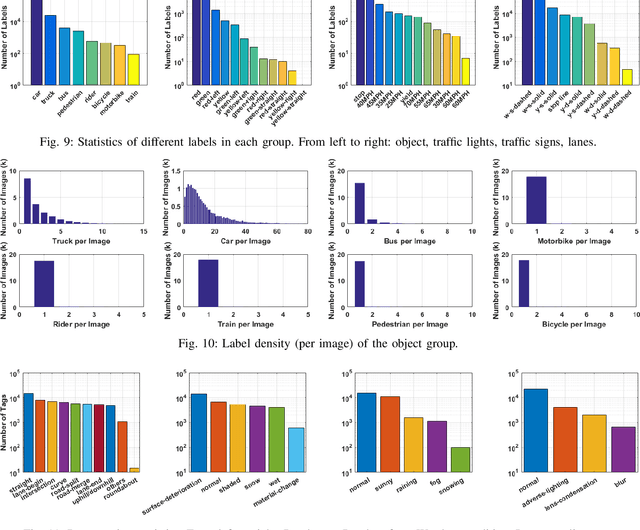
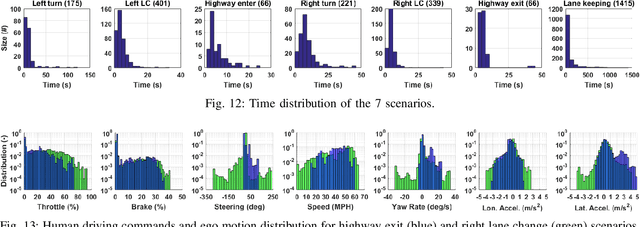
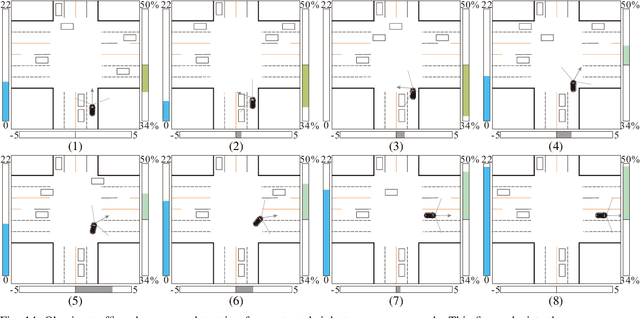
The main goal of this paper is to introduce the data collection effort at Mcity targeting automated vehicle development. We captured a comprehensive set of data from a set of perception sensors (Lidars, Radars, Cameras) as well as vehicle steering/brake/throttle inputs and an RTK unit. Two in-cabin cameras record the human driver's behaviors for possible future use. The naturalistic driving on selected open roads is recorded at different time of day and weather conditions. We also perform designed choreography data collection inside the Mcity test facility focusing on vehicle to vehicle, and vehicle to vulnerable road user interactions which is quite unique among existing open-source datasets. The vehicle platform, data content, tags/labels, and selected analysis results are shown in this paper.