 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSyntactic and Semantic Control of Large Language Models via Sequential Monte Carlo
Apr 18, 2025



A wide range of LM applications require generating text that conforms to syntactic or semantic constraints. Imposing such constraints can be naturally framed as probabilistic conditioning, but exact generation from the resulting distribution -- which can differ substantially from the LM's base distribution -- is generally intractable. In this work, we develop an architecture for controlled LM generation based on sequential Monte Carlo (SMC). Our SMC framework allows us to flexibly incorporate domain- and problem-specific constraints at inference time, and efficiently reallocate computational resources in light of new information during the course of generation. By comparing to a number of alternatives and ablations on four challenging domains -- Python code generation for data science, text-to-SQL, goal inference, and molecule synthesis -- we demonstrate that, with little overhead, our approach allows small open-source language models to outperform models over 8x larger, as well as closed-source, fine-tuned ones. In support of the probabilistic perspective, we show that these performance improvements are driven by better approximation to the posterior distribution. Our system builds on the framework of Lew et al. (2023) and integrates with its language model probabilistic programming language, giving users a simple, programmable way to apply SMC to a broad variety of controlled generation problems.
Fast Controlled Generation from Language Models with Adaptive Weighted Rejection Sampling
Apr 07, 2025The dominant approach to generating from language models subject to some constraint is locally constrained decoding (LCD), incrementally sampling tokens at each time step such that the constraint is never violated. Typically, this is achieved through token masking: looping over the vocabulary and excluding non-conforming tokens. There are two important problems with this approach. (i) Evaluating the constraint on every token can be prohibitively expensive -- LM vocabularies often exceed $100,000$ tokens. (ii) LCD can distort the global distribution over strings, sampling tokens based only on local information, even if they lead down dead-end paths. This work introduces a new algorithm that addresses both these problems. First, to avoid evaluating a constraint on the full vocabulary at each step of generation, we propose an adaptive rejection sampling algorithm that typically requires orders of magnitude fewer constraint evaluations. Second, we show how this algorithm can be extended to produce low-variance, unbiased estimates of importance weights at a very small additional cost -- estimates that can be soundly used within previously proposed sequential Monte Carlo algorithms to correct for the myopic behavior of local constraint enforcement. Through extensive empirical evaluation in text-to-SQL, molecular synthesis, goal inference, pattern matching, and JSON domains, we show that our approach is superior to state-of-the-art baselines, supporting a broader class of constraints and improving both runtime and performance. Additional theoretical and empirical analyses show that our method's runtime efficiency is driven by its dynamic use of computation, scaling with the divergence between the unconstrained and constrained LM, and as a consequence, runtime improvements are greater for better models.
Understanding Epistemic Language with a Bayesian Theory of Mind
Aug 21, 2024



How do people understand and evaluate claims about others' beliefs, even though these beliefs cannot be directly observed? In this paper, we introduce a cognitive model of epistemic language interpretation, grounded in Bayesian inferences about other agents' goals, beliefs, and intentions: a language-augmented Bayesian theory-of-mind (LaBToM). By translating natural language into an epistemic ``language-of-thought'', then evaluating these translations against the inferences produced by inverting a probabilistic generative model of rational action and perception, LaBToM captures graded plausibility judgments about epistemic claims. We validate our model in an experiment where participants watch an agent navigate a maze to find keys hidden in boxes needed to reach their goal, then rate sentences about the agent's beliefs. In contrast with multimodal LLMs (GPT-4o, Gemini Pro) and ablated models, our model correlates highly with human judgments for a wide range of expressions, including modal language, uncertainty expressions, knowledge claims, likelihood comparisons, and attributions of false belief.
Infinite Ends from Finite Samples: Open-Ended Goal Inference as Top-Down Bayesian Filtering of Bottom-Up Proposals
Jul 23, 2024The space of human goals is tremendously vast; and yet, from just a few moments of watching a scene or reading a story, we seem to spontaneously infer a range of plausible motivations for the people and characters involved. What explains this remarkable capacity for intuiting other agents' goals, despite the infinitude of ends they might pursue? And how does this cohere with our understanding of other people as approximately rational agents? In this paper, we introduce a sequential Monte Carlo model of open-ended goal inference, which combines top-down Bayesian inverse planning with bottom-up sampling based on the statistics of co-occurring subgoals. By proposing goal hypotheses related to the subgoals achieved by an agent, our model rapidly generates plausible goals without exhaustive search, then filters out goals that would be irrational given the actions taken so far. We validate this model in a goal inference task called Block Words, where participants try to guess the word that someone is stacking out of lettered blocks. In comparison to both heuristic bottom-up guessing and exact Bayesian inference over hundreds of goals, our model better predicts the mean, variance, efficiency, and resource rationality of human goal inferences, achieving similar accuracy to the exact model at a fraction of the cognitive cost, while also explaining garden-path effects that arise from misleading bottom-up cues. Our experiments thus highlight the importance of uniting top-down and bottom-up models for explaining the speed, accuracy, and generality of human theory-of-mind.
Building Machines that Learn and Think with People
Jul 22, 2024



What do we want from machine intelligence? We envision machines that are not just tools for thought, but partners in thought: reasonable, insightful, knowledgeable, reliable, and trustworthy systems that think with us. Current artificial intelligence (AI) systems satisfy some of these criteria, some of the time. In this Perspective, we show how the science of collaborative cognition can be put to work to engineer systems that really can be called ``thought partners,'' systems built to meet our expectations and complement our limitations. We lay out several modes of collaborative thought in which humans and AI thought partners can engage and propose desiderata for human-compatible thought partnerships. Drawing on motifs from computational cognitive science, we motivate an alternative scaling path for the design of thought partners and ecosystems around their use through a Bayesian lens, whereby the partners we construct actively build and reason over models of the human and world.
Partially Observable Task and Motion Planning with Uncertainty and Risk Awareness
Mar 15, 2024



Integrated task and motion planning (TAMP) has proven to be a valuable approach to generalizable long-horizon robotic manipulation and navigation problems. However, the typical TAMP problem formulation assumes full observability and deterministic action effects. These assumptions limit the ability of the planner to gather information and make decisions that are risk-aware. We propose a strategy for TAMP with Uncertainty and Risk Awareness (TAMPURA) that is capable of efficiently solving long-horizon planning problems with initial-state and action outcome uncertainty, including problems that require information gathering and avoiding undesirable and irreversible outcomes. Our planner reasons under uncertainty at both the abstract task level and continuous controller level. Given a set of closed-loop goal-conditioned controllers operating in the primitive action space and a description of their preconditions and potential capabilities, we learn a high-level abstraction that can be solved efficiently and then refined to continuous actions for execution. We demonstrate our approach on several robotics problems where uncertainty is a crucial factor and show that reasoning under uncertainty in these problems outperforms previously proposed determinized planning, direct search, and reinforcement learning strategies. Lastly, we demonstrate our planner on two real-world robotics problems using recent advancements in probabilistic perception.
Pragmatic Instruction Following and Goal Assistance via Cooperative Language-Guided Inverse Planning
Feb 27, 2024People often give instructions whose meaning is ambiguous without further context, expecting that their actions or goals will disambiguate their intentions. How can we build assistive agents that follow such instructions in a flexible, context-sensitive manner? This paper introduces cooperative language-guided inverse plan search (CLIPS), a Bayesian agent architecture for pragmatic instruction following and goal assistance. Our agent assists a human by modeling them as a cooperative planner who communicates joint plans to the assistant, then performs multimodal Bayesian inference over the human's goal from actions and language, using large language models (LLMs) to evaluate the likelihood of an instruction given a hypothesized plan. Given this posterior, our assistant acts to minimize expected goal achievement cost, enabling it to pragmatically follow ambiguous instructions and provide effective assistance even when uncertain about the goal. We evaluate these capabilities in two cooperative planning domains (Doors, Keys & Gems and VirtualHome), finding that CLIPS significantly outperforms GPT-4V, LLM-based literal instruction following and unimodal inverse planning in both accuracy and helpfulness, while closely matching the inferences and assistive judgments provided by human raters.
Grounding Language about Belief in a Bayesian Theory-of-Mind
Feb 16, 2024


Despite the fact that beliefs are mental states that cannot be directly observed, humans talk about each others' beliefs on a regular basis, often using rich compositional language to describe what others think and know. What explains this capacity to interpret the hidden epistemic content of other minds? In this paper, we take a step towards an answer by grounding the semantics of belief statements in a Bayesian theory-of-mind: By modeling how humans jointly infer coherent sets of goals, beliefs, and plans that explain an agent's actions, then evaluating statements about the agent's beliefs against these inferences via epistemic logic, our framework provides a conceptual role semantics for belief, explaining the gradedness and compositionality of human belief attributions, as well as their intimate connection with goals and plans. We evaluate this framework by studying how humans attribute goals and beliefs while watching an agent solve a doors-and-keys gridworld puzzle that requires instrumental reasoning about hidden objects. In contrast to pure logical deduction, non-mentalizing baselines, and mentalizing that ignores the role of instrumental plans, our model provides a much better fit to human goal and belief attributions, demonstrating the importance of theory-of-mind for a semantics of belief.
Inferring the Goals of Communicating Agents from Actions and Instructions
Jun 28, 2023



When humans cooperate, they frequently coordinate their activity through both verbal communication and non-verbal actions, using this information to infer a shared goal and plan. How can we model this inferential ability? In this paper, we introduce a model of a cooperative team where one agent, the principal, may communicate natural language instructions about their shared plan to another agent, the assistant, using GPT-3 as a likelihood function for instruction utterances. We then show how a third person observer can infer the team's goal via multi-modal Bayesian inverse planning from actions and instructions, computing the posterior distribution over goals under the assumption that agents will act and communicate rationally to achieve them. We evaluate this approach by comparing it with human goal inferences in a multi-agent gridworld, finding that our model's inferences closely correlate with human judgments (R = 0.96). When compared to inference from actions alone, we also find that instructions lead to more rapid and less uncertain goal inference, highlighting the importance of verbal communication for cooperative agents.
From Machine Learning to Robotics: Challenges and Opportunities for Embodied Intelligence
Oct 28, 2021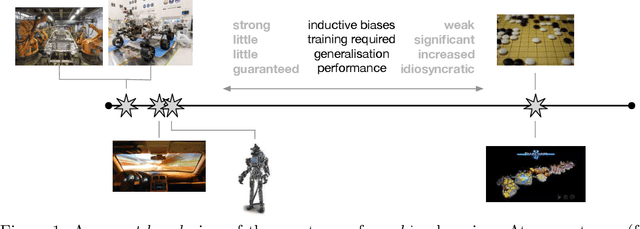
Machine learning has long since become a keystone technology, accelerating science and applications in a broad range of domains. Consequently, the notion of applying learning methods to a particular problem set has become an established and valuable modus operandi to advance a particular field. In this article we argue that such an approach does not straightforwardly extended to robotics -- or to embodied intelligence more generally: systems which engage in a purposeful exchange of energy and information with a physical environment. In particular, the purview of embodied intelligent agents extends significantly beyond the typical considerations of main-stream machine learning approaches, which typically (i) do not consider operation under conditions significantly different from those encountered during training; (ii) do not consider the often substantial, long-lasting and potentially safety-critical nature of interactions during learning and deployment; (iii) do not require ready adaptation to novel tasks while at the same time (iv) effectively and efficiently curating and extending their models of the world through targeted and deliberate actions. In reality, therefore, these limitations result in learning-based systems which suffer from many of the same operational shortcomings as more traditional, engineering-based approaches when deployed on a robot outside a well defined, and often narrow operating envelope. Contrary to viewing embodied intelligence as another application domain for machine learning, here we argue that it is in fact a key driver for the advancement of machine learning technology. In this article our goal is to highlight challenges and opportunities that are specific to embodied intelligence and to propose research directions which may significantly advance the state-of-the-art in robot learning.