 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Aware Region Prompted Vision Language Model
Sep 16, 2025

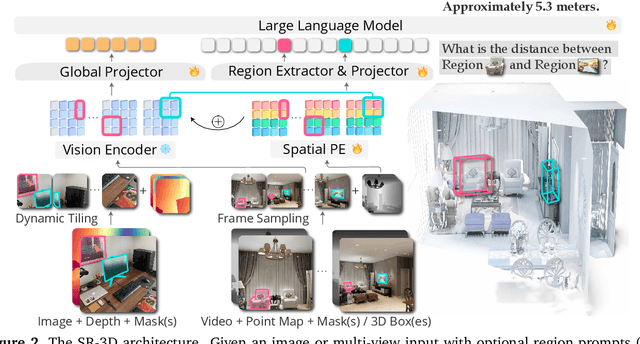
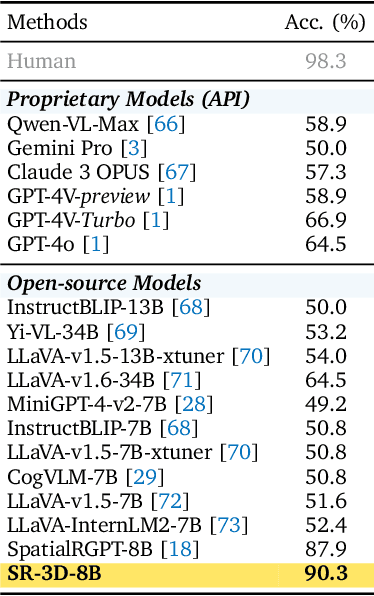
We present Spatial Region 3D (SR-3D) aware vision-language model that connects single-view 2D images and multi-view 3D data through a shared visual token space. SR-3D supports flexible region prompting, allowing users to annotate regions with bounding boxes, segmentation masks on any frame, or directly in 3D, without the need for exhaustive multi-frame labeling. We achieve this by enriching 2D visual features with 3D positional embeddings, which allows the 3D model to draw upon strong 2D priors for more accurate spatial reasoning across frames, even when objects of interest do not co-occur within the same view. Extensive experiments on both general 2D vision language and specialized 3D spatial benchmarks demonstrate that SR-3D achieves state-of-the-art performance, underscoring its effectiveness for unifying 2D and 3D representation space on scene understanding. Moreover, we observe applicability to in-the-wild videos without sensory 3D inputs or ground-truth 3D annotations, where SR-3D accurately infers spatial relationships and metric measurements.
NVIDIA Nemotron Nano 2: An Accurate and Efficient Hybrid Mamba-Transformer Reasoning Model
Aug 21, 2025



We introduce Nemotron-Nano-9B-v2, a hybrid Mamba-Transformer language model designed to increase throughput for reasoning workloads while achieving state-of-the-art accuracy compared to similarly-sized models. Nemotron-Nano-9B-v2 builds on the Nemotron-H architecture, in which the majority of the self-attention layers in the common Transformer architecture are replaced with Mamba-2 layers, to achieve improved inference speed when generating the long thinking traces needed for reasoning. We create Nemotron-Nano-9B-v2 by first pre-training a 12-billion-parameter model (Nemotron-Nano-12B-v2-Base) on 20 trillion tokens using an FP8 training recipe. After aligning Nemotron-Nano-12B-v2-Base, we employ the Minitron strategy to compress and distill the model with the goal of enabling inference on up to 128k tokens on a single NVIDIA A10G GPU (22GiB of memory, bfloat16 precision). Compared to existing similarly-sized models (e.g., Qwen3-8B), we show that Nemotron-Nano-9B-v2 achieves on-par or better accuracy on reasoning benchmarks while achieving up to 6x higher inference throughput in reasoning settings like 8k input and 16k output tokens. We are releasing Nemotron-Nano-9B-v2, Nemotron-Nano12B-v2-Base, and Nemotron-Nano-9B-v2-Base checkpoints along with the majority of our pre- and post-training datasets on Hugging Face.
Scaling RL to Long Videos
Jul 10, 2025We introduce a full-stack framework that scales up reasoning in vision-language models (VLMs) to long videos, leveraging reinforcement learning. We address the unique challenges of long video reasoning by integrating three critical components: (1) a large-scale dataset, LongVideo-Reason, comprising 52K long video QA pairs with high-quality reasoning annotations across diverse domains such as sports, games, and vlogs; (2) a two-stage training pipeline that extends VLMs with chain-of-thought supervised fine-tuning (CoT-SFT) and reinforcement learning (RL); and (3) a training infrastructure for long video RL, named Multi-modal Reinforcement Sequence Parallelism (MR-SP), which incorporates sequence parallelism and a vLLM-based engine tailored for long video, using cached video embeddings for efficient rollout and prefilling. In experiments, LongVILA-R1-7B achieves strong performance on long video QA benchmarks such as VideoMME. It also outperforms Video-R1-7B and even matches Gemini-1.5-Pro across temporal reasoning, goal and purpose reasoning, spatial reasoning, and plot reasoning on our LongVideo-Reason-eval benchmark. Notably, our MR-SP system achieves up to 2.1x speedup on long video RL training. LongVILA-R1 demonstrates consistent performance gains as the number of input video frames scales. LongVILA-R1 marks a firm step towards long video reasoning in VLMs. In addition, we release our training system for public availability that supports RL training on various modalities (video, text, and audio), various models (VILA and Qwen series), and even image and video generation models. On a single A100 node (8 GPUs), it supports RL training on hour-long videos (e.g., 3,600 frames / around 256k tokens).
FlexGS: Train Once, Deploy Everywhere with Many-in-One Flexible 3D Gaussian Splatting
Jun 04, 20253D Gaussian splatting (3DGS) has enabled various applications in 3D scene representation and novel view synthesis due to its efficient rendering capabilities. However, 3DGS demands relatively significant GPU memory, limiting its use on devices with restricted computational resources. Previous approaches have focused on pruning less important Gaussians, effectively compressing 3DGS but often requiring a fine-tuning stage and lacking adaptability for the specific memory needs of different devices. In this work, we present an elastic inference method for 3DGS. Given an input for the desired model size, our method selects and transforms a subset of Gaussians, achieving substantial rendering performance without additional fine-tuning. We introduce a tiny learnable module that controls Gaussian selection based on the input percentage, along with a transformation module that adjusts the selected Gaussians to complement the performance of the reduced model. Comprehensive experiments on ZipNeRF, MipNeRF and Tanks\&Temples scenes demonstrate the effectiveness of our approach. Code is available at https://flexgs.github.io.
LongMamba: Enhancing Mamba's Long Context Capabilities via Training-Free Receptive Field Enlargement
Apr 22, 2025State space models (SSMs) have emerged as an efficient alternative to Transformer models for language modeling, offering linear computational complexity and constant memory usage as context length increases. However, despite their efficiency in handling long contexts, recent studies have shown that SSMs, such as Mamba models, generally underperform compared to Transformers in long-context understanding tasks. To address this significant shortfall and achieve both efficient and accurate long-context understanding, we propose LongMamba, a training-free technique that significantly enhances the long-context capabilities of Mamba models. LongMamba builds on our discovery that the hidden channels in Mamba can be categorized into local and global channels based on their receptive field lengths, with global channels primarily responsible for long-context capability. These global channels can become the key bottleneck as the input context lengthens. Specifically, when input lengths largely exceed the training sequence length, global channels exhibit limitations in adaptively extend their receptive fields, leading to Mamba's poor long-context performance. The key idea of LongMamba is to mitigate the hidden state memory decay in these global channels by preventing the accumulation of unimportant tokens in their memory. This is achieved by first identifying critical tokens in the global channels and then applying token filtering to accumulate only those critical tokens. Through extensive benchmarking across synthetic and real-world long-context scenarios, LongMamba sets a new standard for Mamba's long-context performance, significantly extending its operational range without requiring additional training. Our code is available at https://github.com/GATECH-EIC/LongMamba.
CLIMB: CLustering-based Iterative Data Mixture Bootstrapping for Language Model Pre-training
Apr 17, 2025



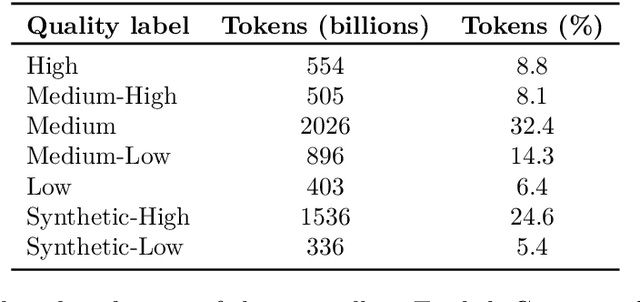
Pre-training datasets are typically collected from web content and lack inherent domain divisions. For instance, widely used datasets like Common Crawl do not include explicit domain labels, while manually curating labeled datasets such as The Pile is labor-intensive. Consequently, identifying an optimal pre-training data mixture remains a challenging problem, despite its significant benefits for pre-training performance. To address these challenges, we propose CLustering-based Iterative Data Mixture Bootstrapping (CLIMB), an automated framework that discovers, evaluates, and refines data mixtures in a pre-training setting. Specifically, CLIMB embeds and clusters large-scale datasets in a semantic space and then iteratively searches for optimal mixtures using a smaller proxy model and a predictor. When continuously trained on 400B tokens with this mixture, our 1B model exceeds the state-of-the-art Llama-3.2-1B by 2.0%. Moreover, we observe that optimizing for a specific domain (e.g., Social Sciences) yields a 5% improvement over random sampling. Finally, we introduce ClimbLab, a filtered 1.2-trillion-token corpus with 20 clusters as a research playground, and ClimbMix, a compact yet powerful 400-billion-token dataset designed for efficient pre-training that delivers superior performance under an equal token budget. We analyze the final data mixture, elucidating the characteristics of an optimal data mixture. Our data is available at: https://research.nvidia.com/labs/lpr/climb/
Efficient Hybrid Language Model Compression through Group-Aware SSM Pruning
Apr 15, 2025Hybrid LLM architectures that combine Attention and State Space Models (SSMs) achieve state-of-the-art accuracy and runtime performance. Recent work has demonstrated that applying compression and distillation to Attention-only models yields smaller, more accurate models at a fraction of the training cost. In this work, we explore the effectiveness of compressing Hybrid architectures. We introduce a novel group-aware pruning strategy that preserves the structural integrity of SSM blocks and their sequence modeling capabilities. Furthermore, we demonstrate the necessity of such SSM pruning to achieve improved accuracy and inference speed compared to traditional approaches. Our compression recipe combines SSM, FFN, embedding dimension, and layer pruning, followed by knowledge distillation-based retraining, similar to the MINITRON technique. Using this approach, we compress the Nemotron-H 8B Hybrid model down to 4B parameters with up to 40x fewer training tokens. The resulting model surpasses the accuracy of similarly-sized models while achieving 2x faster inference, significantly advancing the Pareto frontier.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025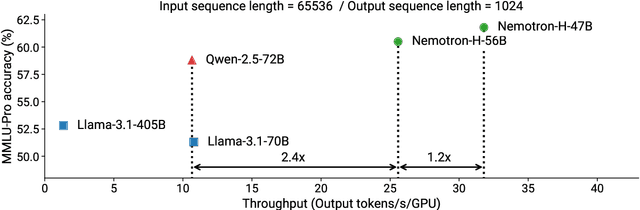

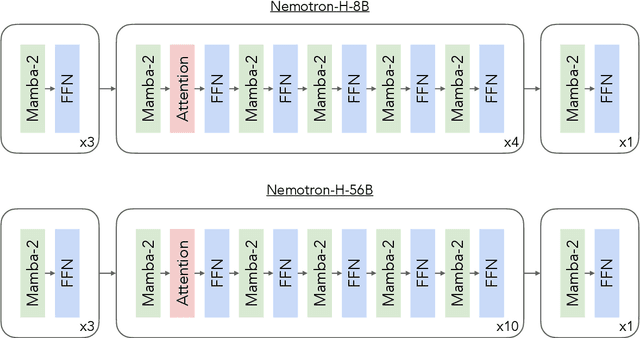
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.
Scaling Vision Pre-Training to 4K Resolution
Mar 25, 2025High-resolution perception of visual details is crucial for daily tasks. Current vision pre-training, however, is still limited to low resolutions (e.g., 378 x 378 pixels) due to the quadratic cost of processing larger images. We introduce PS3 that scales CLIP-style vision pre-training to 4K resolution with a near-constant cost. Instead of contrastive learning on global image representation, PS3 is pre-trained by selectively processing local regions and contrasting them with local detailed captions, enabling high-resolution representation learning with greatly reduced computational overhead. The pre-trained PS3 is able to both encode the global image at low resolution and selectively process local high-resolution regions based on their saliency or relevance to a text prompt. When applying PS3 to multi-modal LLM (MLLM), the resulting model, named VILA-HD, significantly improves high-resolution visual perception compared to baselines without high-resolution vision pre-training such as AnyRes and S^2 while using up to 4.3x fewer tokens. PS3 also unlocks appealing scaling properties of VILA-HD, including scaling up resolution for free and scaling up test-time compute for better performance. Compared to state of the arts, VILA-HD outperforms previous MLLMs such as NVILA and Qwen2-VL across multiple benchmarks and achieves better efficiency than latest token pruning approaches. Finally, we find current benchmarks do not require 4K-resolution perception, which motivates us to propose 4KPro, a new benchmark of image QA at 4K resolution, on which VILA-HD outperforms all previous MLLMs, including a 14.5% improvement over GPT-4o, and a 3.2% improvement and 2.96x speedup over Qwen2-VL.
TwinTURBO: Semi-Supervised Fine-Tuning of Foundation Models via Mutual Information Decompositions for Downstream Task and Latent Spaces
Mar 10, 2025



We present a semi-supervised fine-tuning framework for foundation models that utilises mutual information decomposition to address the challenges of training for a limited amount of labelled data. Our approach derives two distinct lower bounds: i) for the downstream task space, such as classification, optimised using conditional and marginal cross-entropy alongside Kullback-Leibler divergence, and ii) for the latent space representation, regularised and aligned using a contrastive-like decomposition. This fine-tuning strategy retains the pre-trained structure of the foundation model, modifying only a specialised projector module comprising a small transformer and a token aggregation technique. Experiments on several datasets demonstrate significant improvements in classification tasks under extremely low-labelled conditions by effectively leveraging unlabelled data.