 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards General and Autonomous Learning of Core Skills: A Case Study in Locomotion
Aug 06, 2020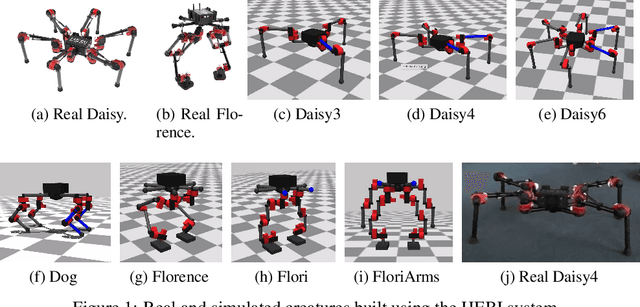
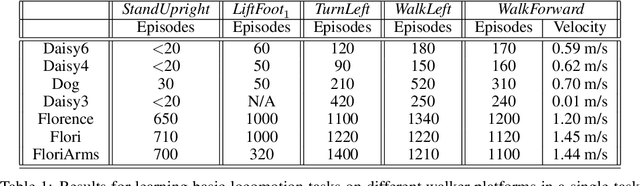
Modern Reinforcement Learning (RL) algorithms promise to solve difficult motor control problems directly from raw sensory inputs. Their attraction is due in part to the fact that they can represent a general class of methods that allow to learn a solution with a reasonably set reward and minimal prior knowledge, even in situations where it is difficult or expensive for a human expert. For RL to truly make good on this promise, however, we need algorithms and learning setups that can work across a broad range of problems with minimal problem specific adjustments or engineering. In this paper, we study this idea of generality in the locomotion domain. We develop a learning framework that can learn sophisticated locomotion behavior for a wide spectrum of legged robots, such as bipeds, tripeds, quadrupeds and hexapods, including wheeled variants. Our learning framework relies on a data-efficient, off-policy multi-task RL algorithm and a small set of reward functions that are semantically identical across robots. To underline the general applicability of the method, we keep the hyper-parameter settings and reward definitions constant across experiments and rely exclusively on on-board sensing. For nine different types of robots, including a real-world quadruped robot, we demonstrate that the same algorithm can rapidly learn diverse and reusable locomotion skills without any platform specific adjustments or additional instrumentation of the learning setup.
Data-efficient Hindsight Off-policy Option Learning
Jul 30, 2020
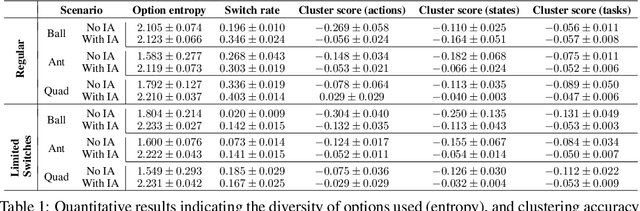

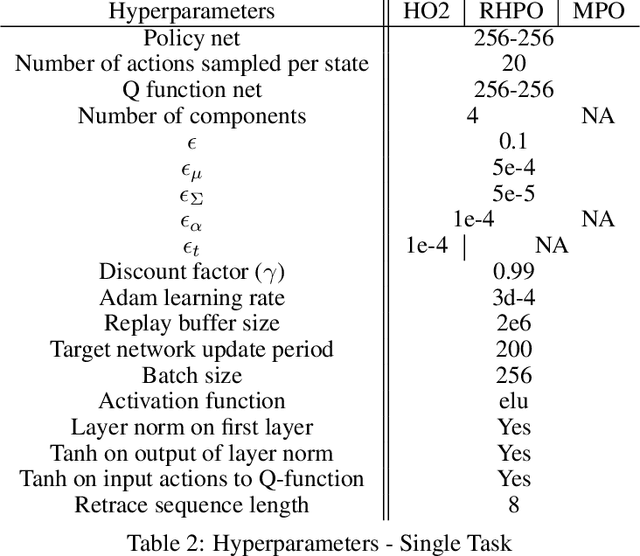
Solutions to most complex tasks can be decomposed into simpler, intermediate skills, reusable across wider ranges of problems. We follow this concept and introduce Hindsight Off-policy Options (HO2), a new algorithm for efficient and robust option learning. The algorithm relies on critic-weighted maximum likelihood estimation and an efficient dynamic programming inference procedure over off-policy trajectories. We can backpropagate through the inference procedure through time and the policy components for every time-step, making it possible to train all component's parameters off-policy, independently of the data-generating behavior policy. Experimentally, we demonstrate that HO2 outperforms competitive baselines and solves demanding robot stacking and ball-in-cup tasks from raw pixel inputs in simulation. We further compare autoregressive option policies with simple mixture policies, providing insights into the relative impact of two types of abstractions common in the options framework: action abstraction and temporal abstraction. Finally, we illustrate challenges caused by stale data in off-policy options learning and provide effective solutions.
RL Unplugged: Benchmarks for Offline Reinforcement Learning
Jul 02, 2020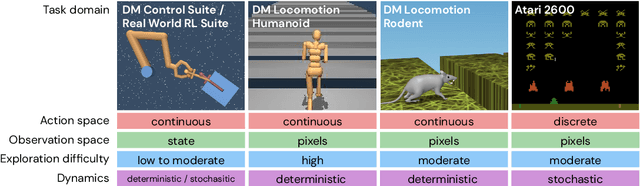
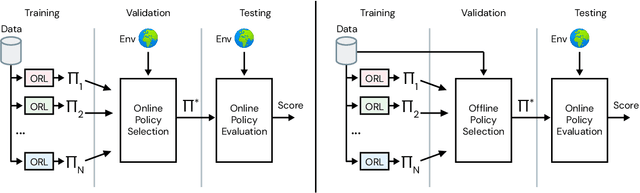
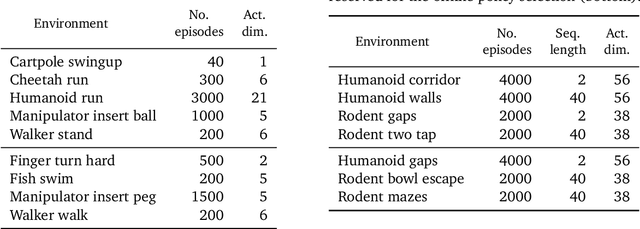
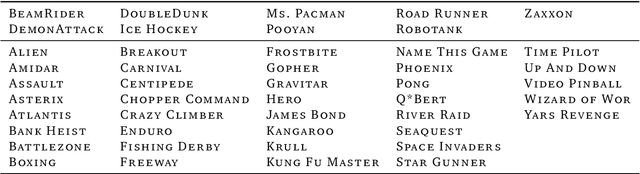
Offline methods for reinforcement learning have a potential to help bridge the gap between reinforcement learning research and real-world applications. They make it possible to learn policies from offline datasets, thus overcoming concerns associated with online data collection in the real-world, including cost, safety, or ethical concerns. In this paper, we propose a benchmark called RL Unplugged to evaluate and compare offline RL methods. RL Unplugged includes data from a diverse range of domains including games ({\em e.g.,} Atari benchmark) and simulated motor control problems ({\em e.g.,} DM Control Suite). The datasets include domains that are partially or fully observable, use continuous or discrete actions, and have stochastic vs. deterministic dynamics. We propose detailed evaluation protocols for each domain in RL Unplugged and provide an extensive analysis of supervised learning and offline RL methods using these protocols. We will release data for all our tasks and open-source all algorithms presented in this paper. We hope that our suite of benchmarks will increase the reproducibility of experiments and make it possible to study challenging tasks with a limited computational budget, thus making RL research both more systematic and more accessible across the community. Moving forward, we view RL Unplugged as a living benchmark suite that will evolve and grow with datasets contributed by the research community and ourselves. Our project page is available on github (https://git.io/JJUhd).
Critic Regularized Regression
Jun 26, 2020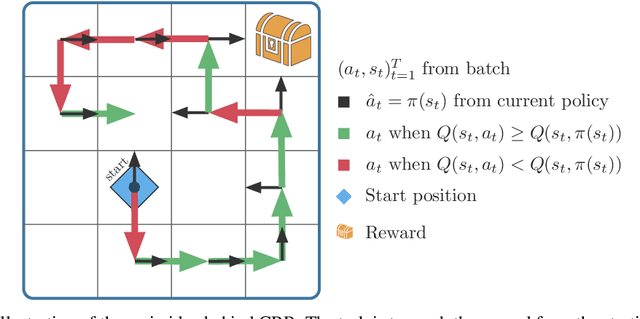


Offline reinforcement learning (RL), also known as batch RL, offers the prospect of policy optimization from large pre-recorded datasets without online environment interaction. It addresses challenges with regard to the cost of data collection and safety, both of which are particularly pertinent to real-world applications of RL. Unfortunately, most off-policy algorithms perform poorly when learning from a fixed dataset. In this paper, we propose a novel offline RL algorithm to learn policies from data using a form of critic-regularized regression (CRR). We find that CRR performs surprisingly well and scales to tasks with high-dimensional state and action spaces -- outperforming several state-of-the-art offline RL algorithms by a significant margin on a wide range of benchmark tasks.
dm_control: Software and Tasks for Continuous Control
Jun 22, 2020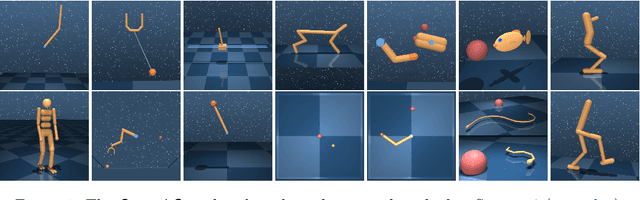
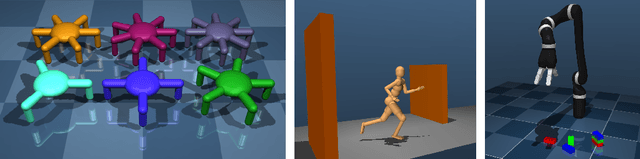
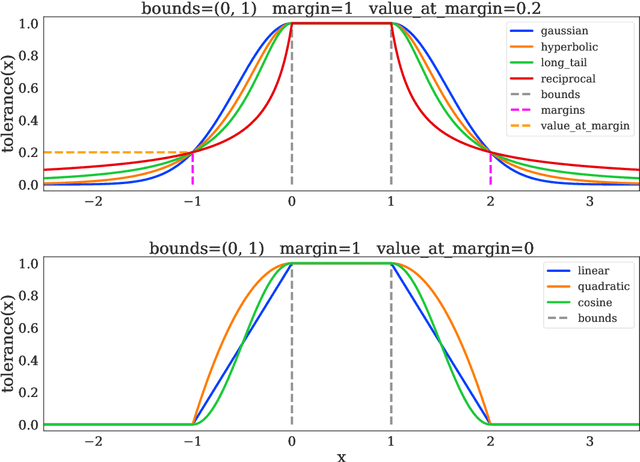
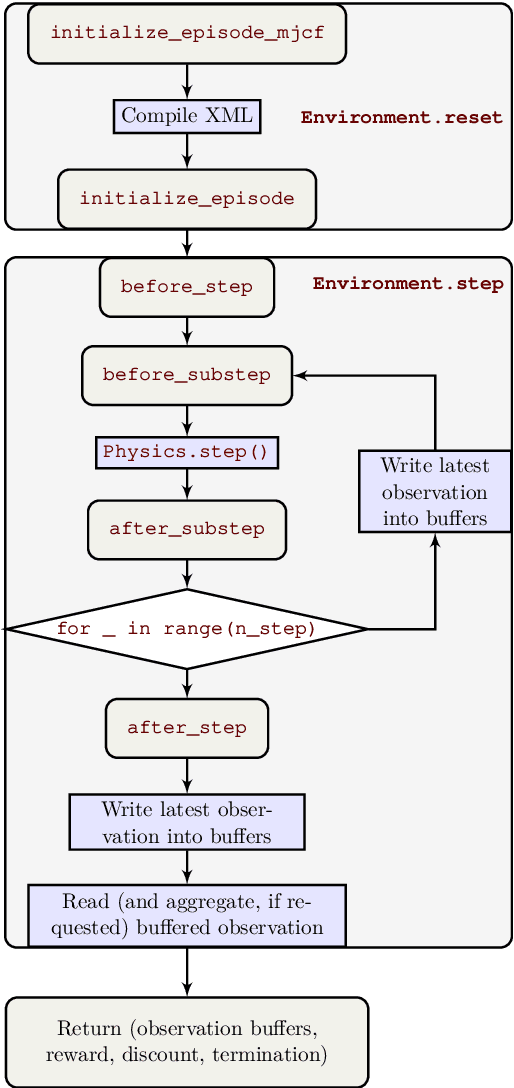
The dm_control software package is a collection of Python libraries and task suites for reinforcement learning agents in an articulated-body simulation. A MuJoCo wrapper provides convenient bindings to functions and data structures. The PyMJCF and Composer libraries enable procedural model manipulation and task authoring. The Control Suite is a fixed set of tasks with standardised structure, intended to serve as performance benchmarks. The Locomotion framework provides high-level abstractions and examples of locomotion tasks. A set of configurable manipulation tasks with a robot arm and snap-together bricks is also included. dm_control is publicly available at https://www.github.com/deepmind/dm_control
Simple Sensor Intentions for Exploration
May 15, 2020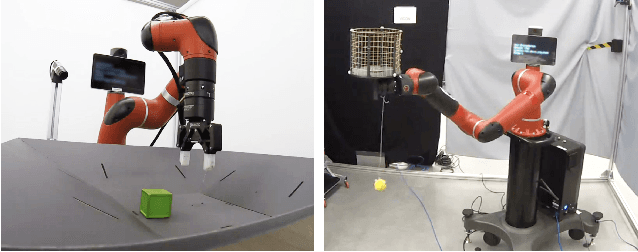
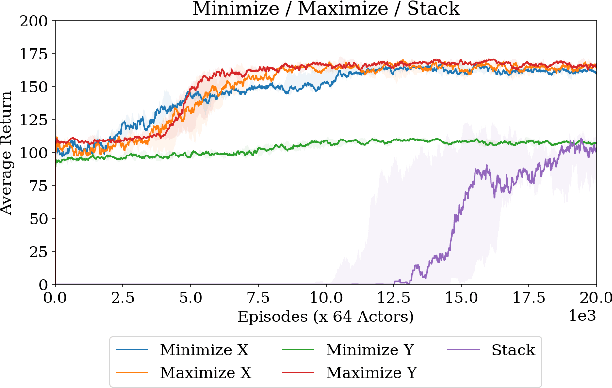
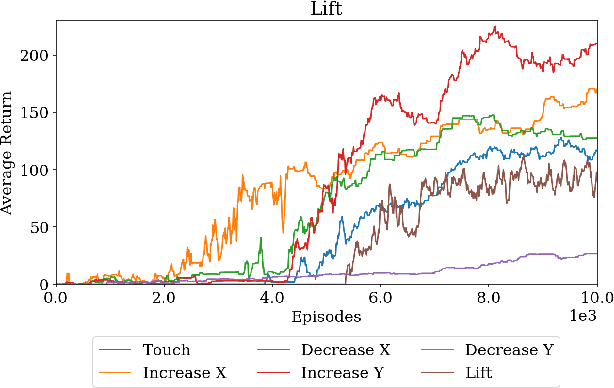
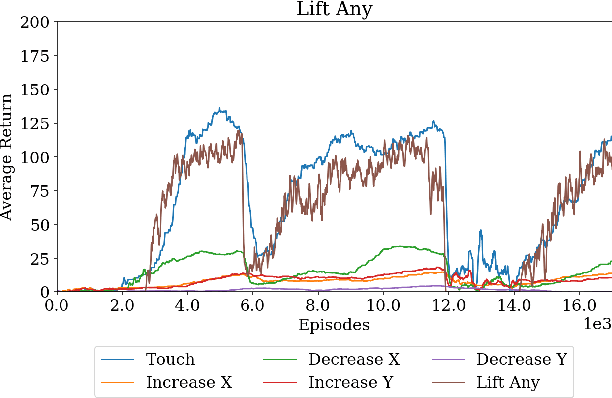
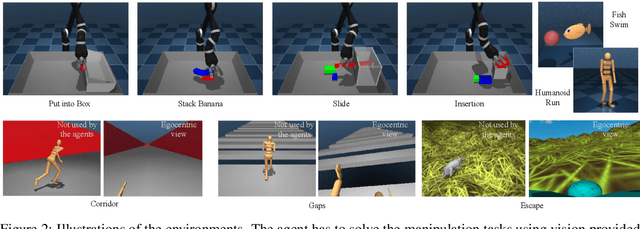
Modern reinforcement learning algorithms can learn solutions to increasingly difficult control problems while at the same time reduce the amount of prior knowledge needed for their application. One of the remaining challenges is the definition of reward schemes that appropriately facilitate exploration without biasing the solution in undesirable ways, and that can be implemented on real robotic systems without expensive instrumentation. In this paper we focus on a setting in which goal tasks are defined via simple sparse rewards, and exploration is facilitated via agent-internal auxiliary tasks. We introduce the idea of simple sensor intentions (SSIs) as a generic way to define auxiliary tasks. SSIs reduce the amount of prior knowledge that is required to define suitable rewards. They can further be computed directly from raw sensor streams and thus do not require expensive and possibly brittle state estimation on real systems. We demonstrate that a learning system based on these rewards can solve complex robotic tasks in simulation and in real world settings. In particular, we show that a real robotic arm can learn to grasp and lift and solve a Ball-in-a-Cup task from scratch, when only raw sensor streams are used for both controller input and in the auxiliary reward definition.
A Distributional View on Multi-Objective Policy Optimization
May 15, 2020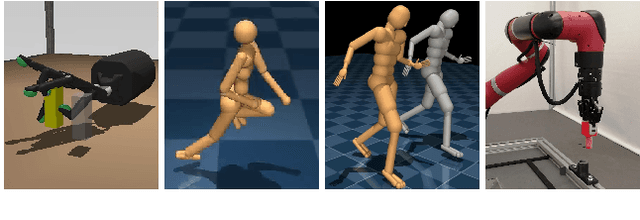
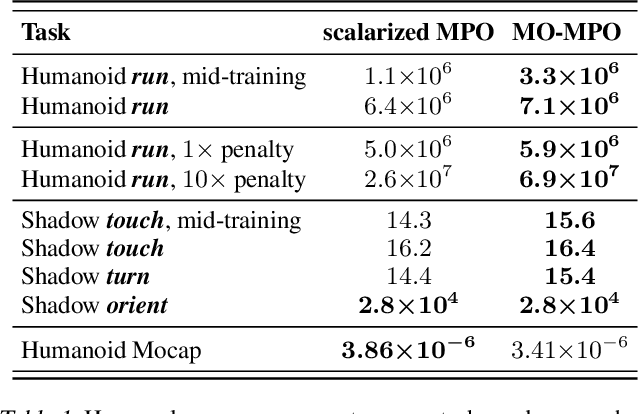
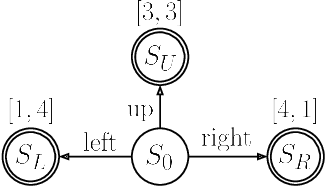
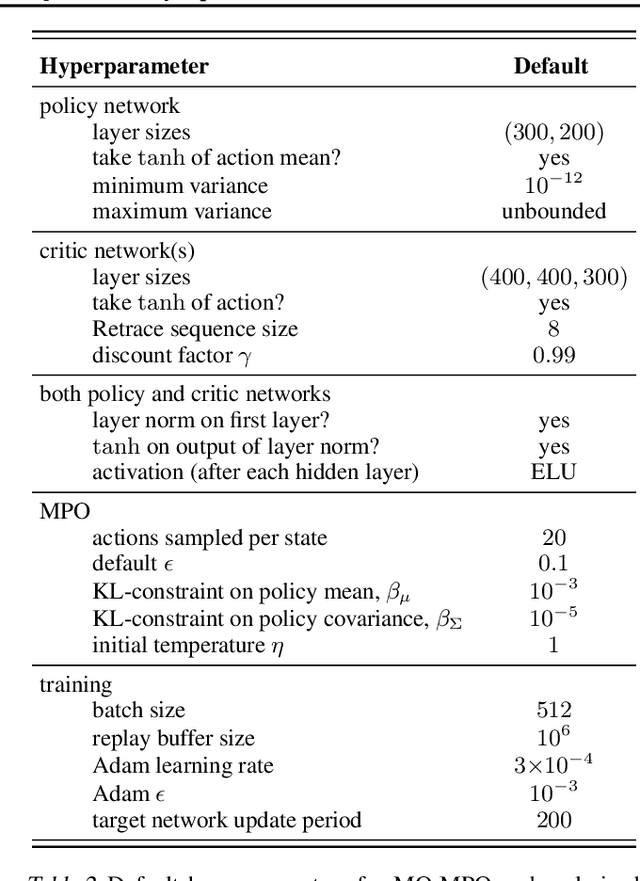
Many real-world problems require trading off multiple competing objectives. However, these objectives are often in different units and/or scales, which can make it challenging for practitioners to express numerical preferences over objectives in their native units. In this paper we propose a novel algorithm for multi-objective reinforcement learning that enables setting desired preferences for objectives in a scale-invariant way. We propose to learn an action distribution for each objective, and we use supervised learning to fit a parametric policy to a combination of these distributions. We demonstrate the effectiveness of our approach on challenging high-dimensional real and simulated robotics tasks, and show that setting different preferences in our framework allows us to trace out the space of nondominated solutions.
Divide-and-Conquer Monte Carlo Tree Search For Goal-Directed Planning
Apr 23, 2020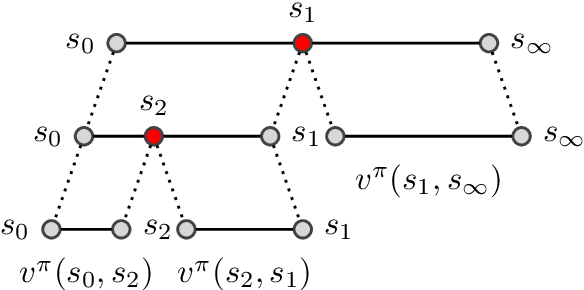
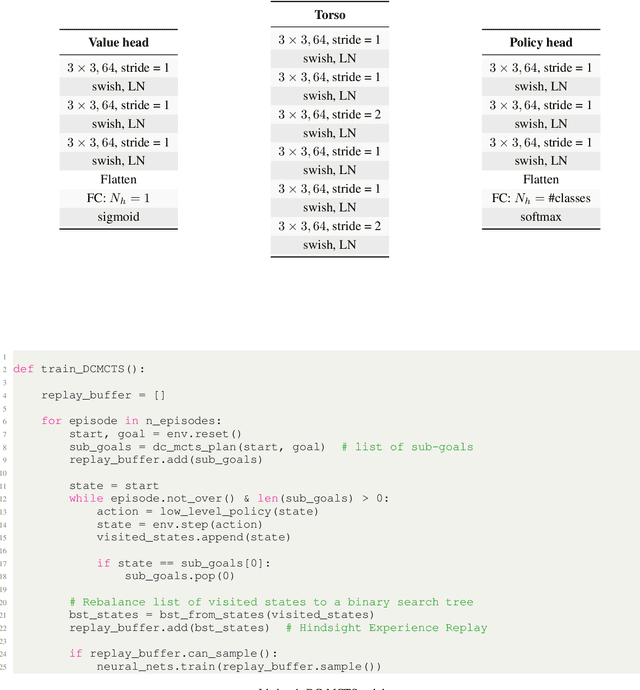
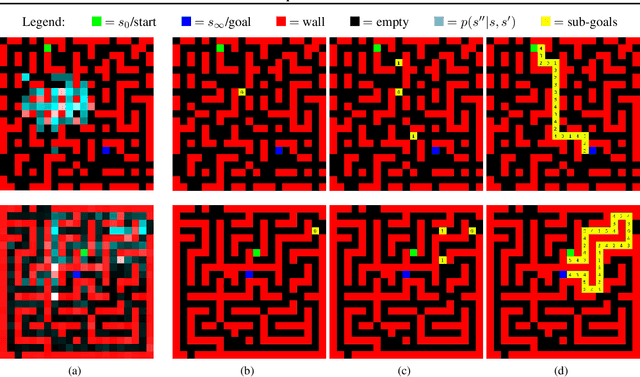
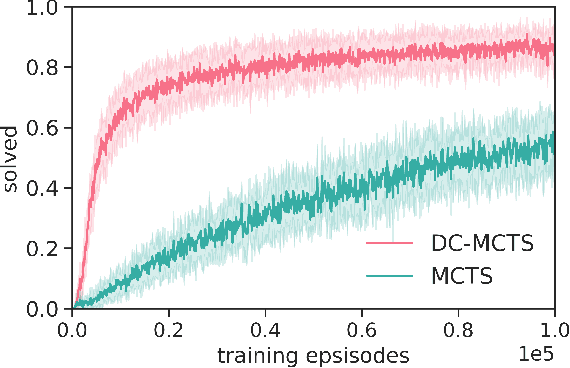
Standard planners for sequential decision making (including Monte Carlo planning, tree search, dynamic programming, etc.) are constrained by an implicit sequential planning assumption: The order in which a plan is constructed is the same in which it is executed. We consider alternatives to this assumption for the class of goal-directed Reinforcement Learning (RL) problems. Instead of an environment transition model, we assume an imperfect, goal-directed policy. This low-level policy can be improved by a plan, consisting of an appropriate sequence of sub-goals that guide it from the start to the goal state. We propose a planning algorithm, Divide-and-Conquer Monte Carlo Tree Search (DC-MCTS), for approximating the optimal plan by means of proposing intermediate sub-goals which hierarchically partition the initial tasks into simpler ones that are then solved independently and recursively. The algorithm critically makes use of a learned sub-goal proposal for finding appropriate partitions trees of new tasks based on prior experience. Different strategies for learning sub-goal proposals give rise to different planning strategies that strictly generalize sequential planning. We show that this algorithmic flexibility over planning order leads to improved results in navigation tasks in grid-worlds as well as in challenging continuous control environments.
Keep Doing What Worked: Behavioral Modelling Priors for Offline Reinforcement Learning
Feb 23, 2020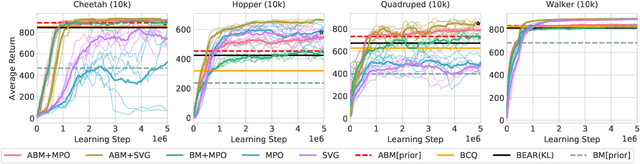
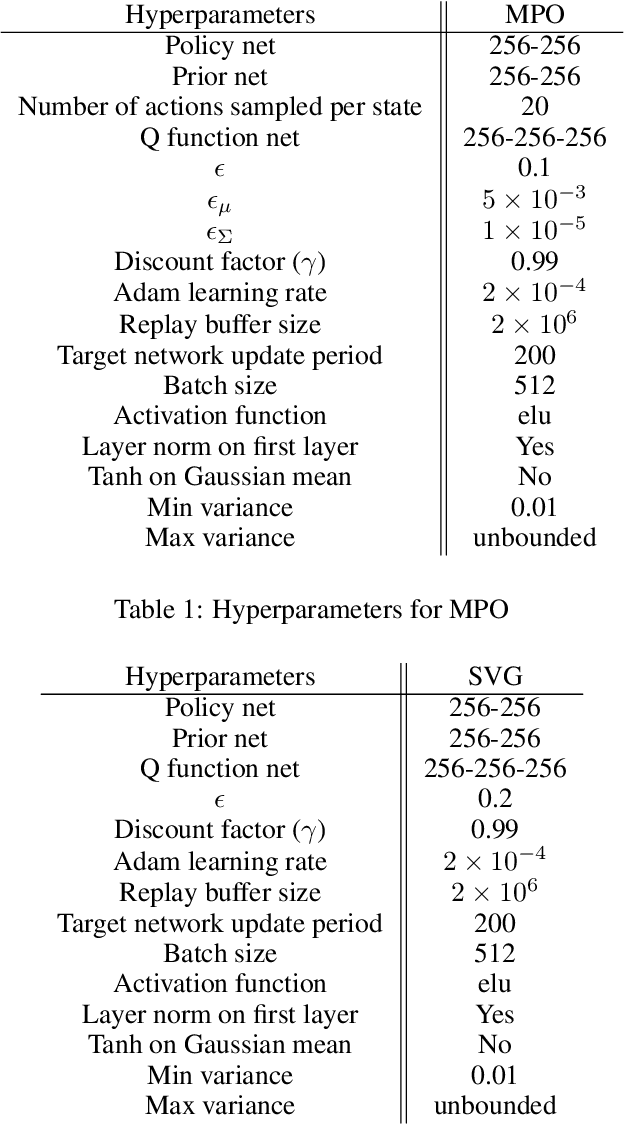
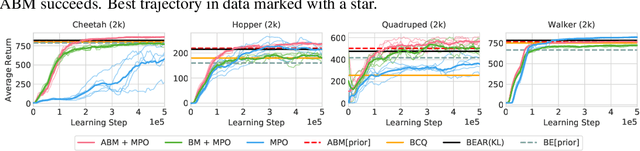
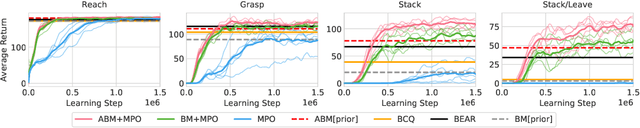
Off-policy reinforcement learning algorithms promise to be applicable in settings where only a fixed data-set (batch) of environment interactions is available and no new experience can be acquired. This property makes these algorithms appealing for real world problems such as robot control. In practice, however, standard off-policy algorithms fail in the batch setting for continuous control. In this paper, we propose a simple solution to this problem. It admits the use of data generated by arbitrary behavior policies and uses a learned prior -- the advantage-weighted behavior model (ABM) -- to bias the RL policy towards actions that have previously been executed and are likely to be successful on the new task. Our method can be seen as an extension of recent work on batch-RL that enables stable learning from conflicting data-sources. We find improvements on competitive baselines in a variety of RL tasks -- including standard continuous control benchmarks and multi-task learning for simulated and real-world robots.
Value-driven Hindsight Modelling
Feb 19, 2020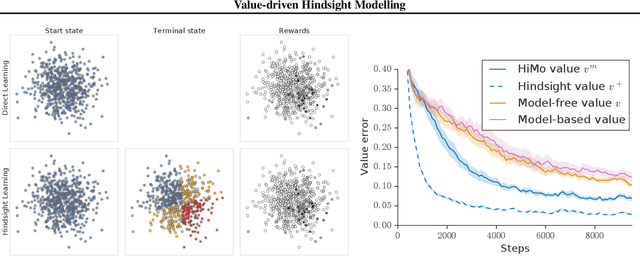
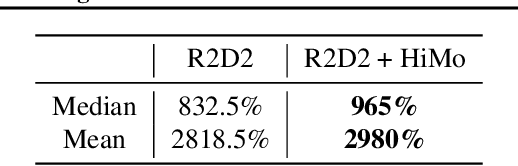
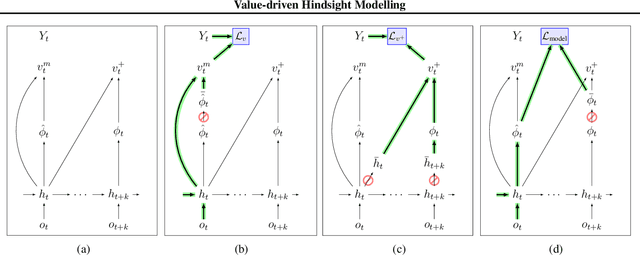
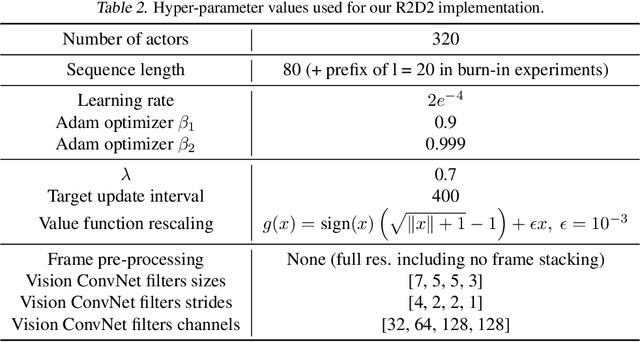
Value estimation is a critical component of the reinforcement learning (RL) paradigm. The question of how to effectively learn predictors for value from data is one of the major problems studied by the RL community, and different approaches exploit structure in the problem domain in different ways. Model learning can make use of the rich transition structure present in sequences of observations, but this approach is usually not sensitive to the reward function. In contrast, model-free methods directly leverage the quantity of interest from the future but have to compose with a potentially weak scalar signal (an estimate of the return). In this paper we develop an approach for representation learning in RL that sits in between these two extremes: we propose to learn what to model in a way that can directly help value prediction. To this end we determine which features of the future trajectory provide useful information to predict the associated return. This provides us with tractable prediction targets that are directly relevant for a task, and can thus accelerate learning of the value function. The idea can be understood as reasoning, in hindsight, about which aspects of the future observations could help past value prediction. We show how this can help dramatically even in simple policy evaluation settings. We then test our approach at scale in challenging domains, including on 57 Atari 2600 games.