 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Podracer architectures for scalable Reinforcement Learning
Apr 13, 2021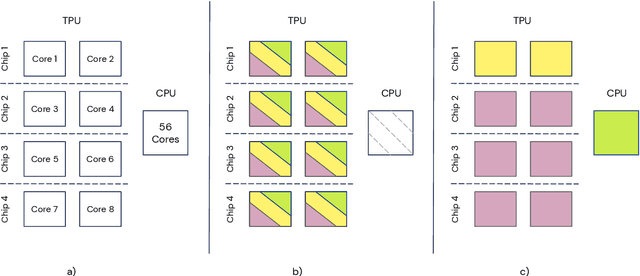
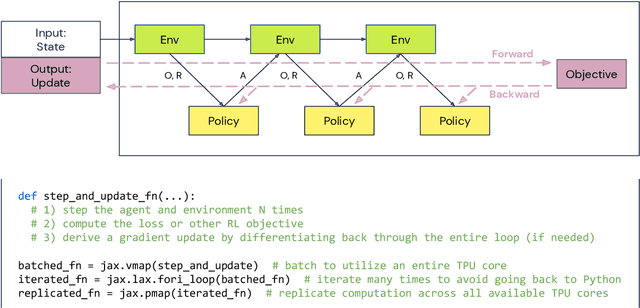
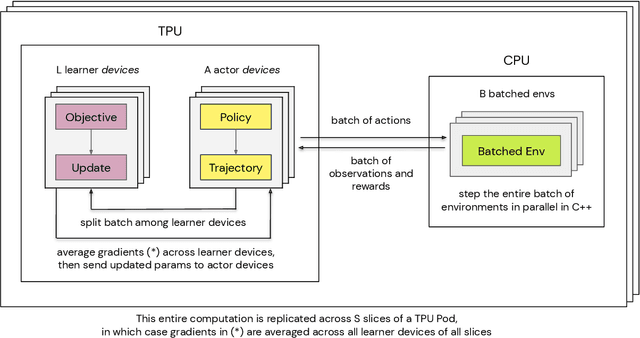
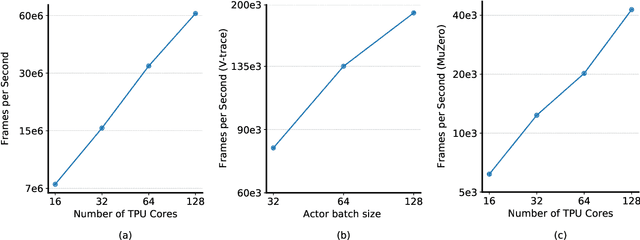
Supporting state-of-the-art AI research requires balancing rapid prototyping, ease of use, and quick iteration, with the ability to deploy experiments at a scale traditionally associated with production systems.Deep learning frameworks such as TensorFlow, PyTorch and JAX allow users to transparently make use of accelerators, such as TPUs and GPUs, to offload the more computationally intensive parts of training and inference in modern deep learning systems. Popular training pipelines that use these frameworks for deep learning typically focus on (un-)supervised learning. How to best train reinforcement learning (RL) agents at scale is still an active research area. In this report we argue that TPUs are particularly well suited for training RL agents in a scalable, efficient and reproducible way. Specifically we describe two architectures designed to make the best use of the resources available on a TPU Pod (a special configuration in a Google data center that features multiple TPU devices connected to each other by extremely low latency communication channels).
Muesli: Combining Improvements in Policy Optimization
Apr 13, 2021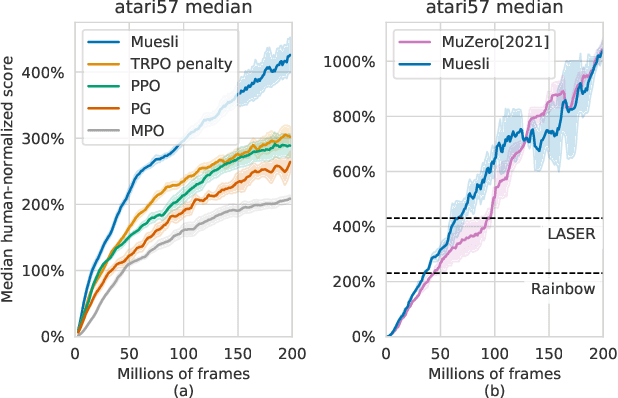
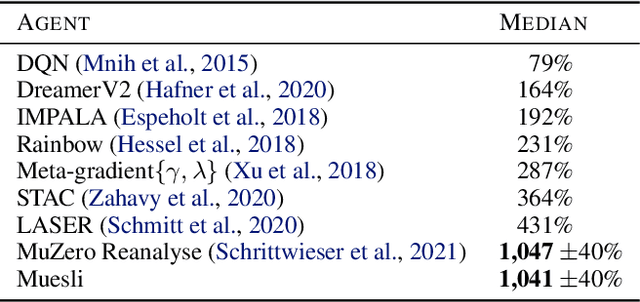
We propose a novel policy update that combines regularized policy optimization with model learning as an auxiliary loss. The update (henceforth Muesli) matches MuZero's state-of-the-art performance on Atari. Notably, Muesli does so without using deep search: it acts directly with a policy network and has computation speed comparable to model-free baselines. The Atari results are complemented by extensive ablations, and by additional results on continuous control and 9x9 Go.
Counterfactual Credit Assignment in Model-Free Reinforcement Learning
Nov 18, 2020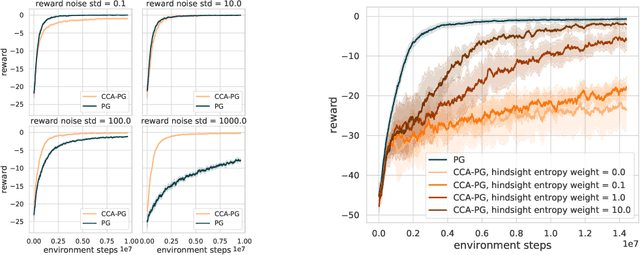
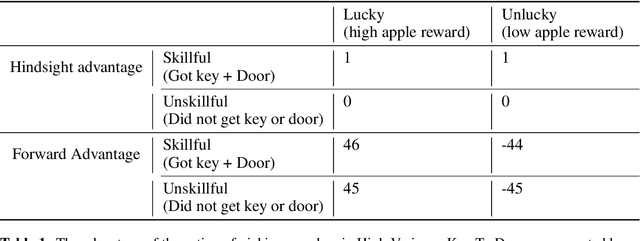
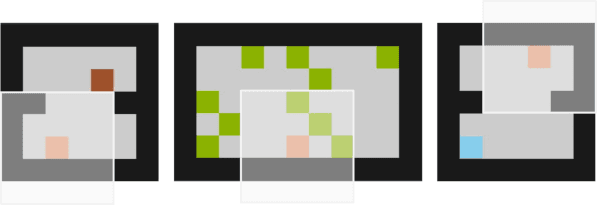
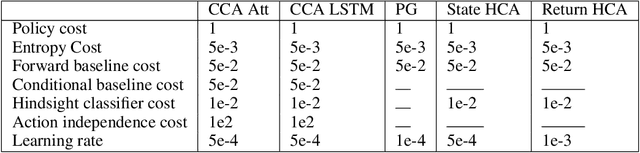
Credit assignment in reinforcement learning is the problem of measuring an action influence on future rewards. In particular, this requires separating skill from luck, ie. disentangling the effect of an action on rewards from that of external factors and subsequent actions. To achieve this, we adapt the notion of counterfactuals from causality theory to a model-free RL setup. The key idea is to condition value functions on future events, by learning to extract relevant information from a trajectory. We then propose to use these as future-conditional baselines and critics in policy gradient algorithms and we develop a valid, practical variant with provably lower variance, while achieving unbiasedness by constraining the hindsight information not to contain information about the agent actions. We demonstrate the efficacy and validity of our algorithm on a number of illustrative problems.
On the role of planning in model-based deep reinforcement learning
Nov 08, 2020
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.
Neural Communication Systems with Bandwidth-limited Channel
Apr 01, 2020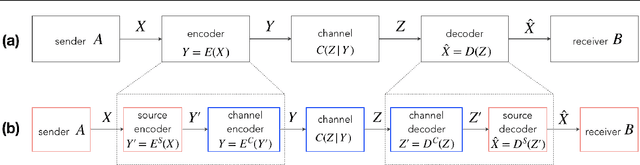
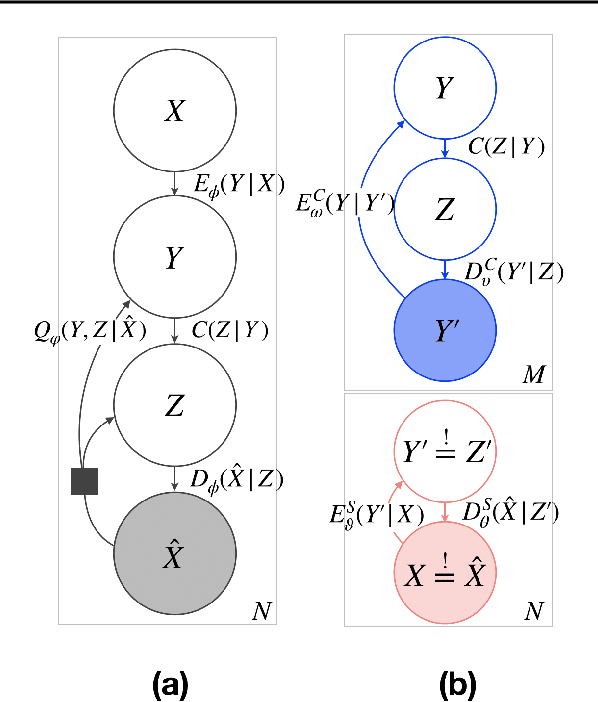
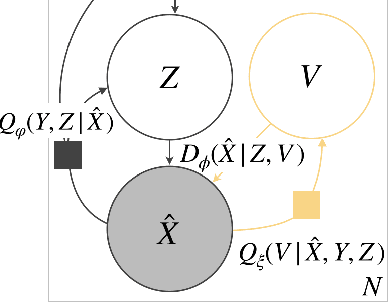
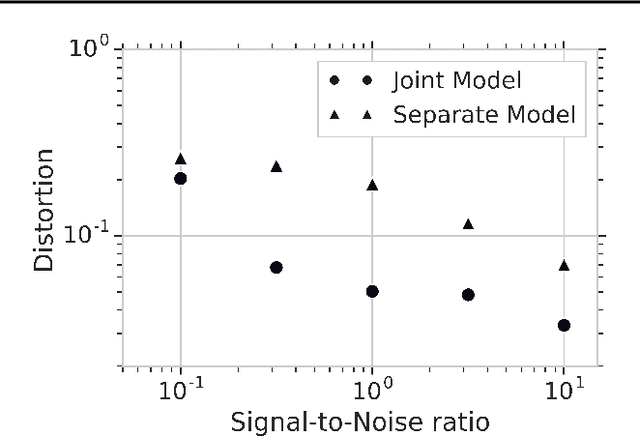
Reliably transmitting messages despite information loss due to a noisy channel is a core problem of information theory. One of the most important aspects of real world communication, e.g. via wifi, is that it may happen at varying levels of information transfer. The bandwidth-limited channel models this phenomenon. In this study we consider learning coding with the bandwidth-limited channel (BWLC). Recently, neural communication models such as variational autoencoders have been studied for the task of source compression. We build upon this work by studying neural communication systems with the BWLC. Specifically,we find three modelling choices that are relevant under expected information loss. First, instead of separating the sub-tasks of compression (source coding) and error correction (channel coding), we propose to model both jointly. Framing the problem as a variational learning problem, we conclude that joint systems outperform their separate counterparts when coding is performed by flexible learnable function approximators such as neural networks. To facilitate learning, we introduce a differentiable and computationally efficient version of the bandwidth-limited channel. Second, we propose a design to model missing information with a prior, and incorporate this into the channel model. Finally, sampling from the joint model is improved by introducing auxiliary latent variables in the decoder. Experimental results justify the validity of our design decisions through improved distortion and FID scores.
Value-driven Hindsight Modelling
Feb 19, 2020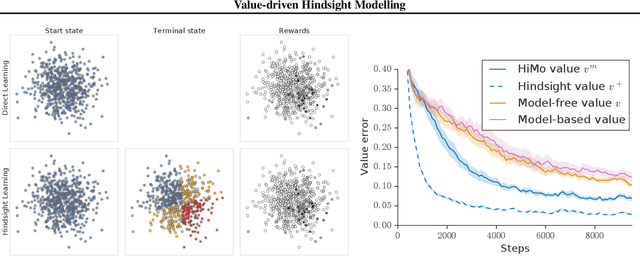
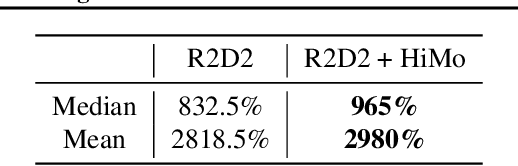
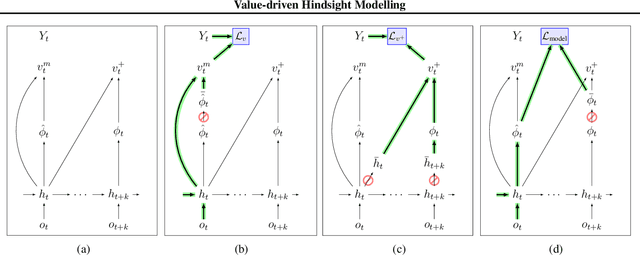
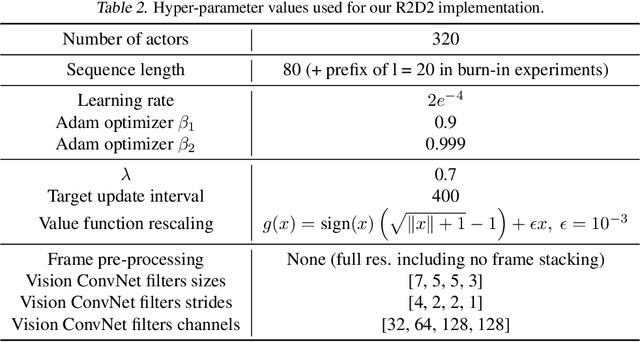
Value estimation is a critical component of the reinforcement learning (RL) paradigm. The question of how to effectively learn predictors for value from data is one of the major problems studied by the RL community, and different approaches exploit structure in the problem domain in different ways. Model learning can make use of the rich transition structure present in sequences of observations, but this approach is usually not sensitive to the reward function. In contrast, model-free methods directly leverage the quantity of interest from the future but have to compose with a potentially weak scalar signal (an estimate of the return). In this paper we develop an approach for representation learning in RL that sits in between these two extremes: we propose to learn what to model in a way that can directly help value prediction. To this end we determine which features of the future trajectory provide useful information to predict the associated return. This provides us with tractable prediction targets that are directly relevant for a task, and can thus accelerate learning of the value function. The idea can be understood as reasoning, in hindsight, about which aspects of the future observations could help past value prediction. We show how this can help dramatically even in simple policy evaluation settings. We then test our approach at scale in challenging domains, including on 57 Atari 2600 games.
Causally Correct Partial Models for Reinforcement Learning
Feb 07, 2020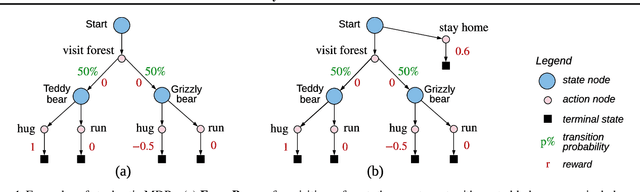
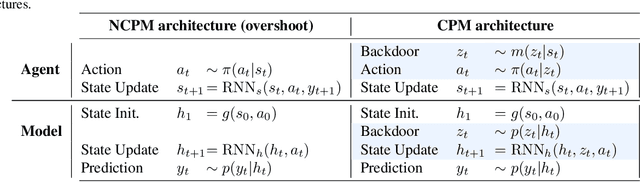

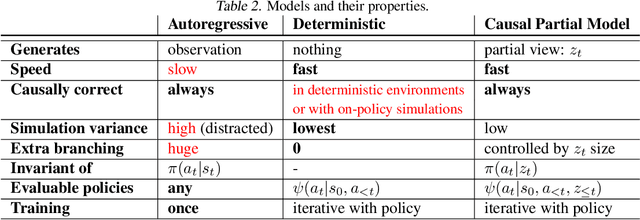
In reinforcement learning, we can learn a model of future observations and rewards, and use it to plan the agent's next actions. However, jointly modeling future observations can be computationally expensive or even intractable if the observations are high-dimensional (e.g. images). For this reason, previous works have considered partial models, which model only part of the observation. In this paper, we show that partial models can be causally incorrect: they are confounded by the observations they don't model, and can therefore lead to incorrect planning. To address this, we introduce a general family of partial models that are provably causally correct, yet remain fast because they do not need to fully model future observations.
TF-Replicator: Distributed Machine Learning for Researchers
Feb 01, 2019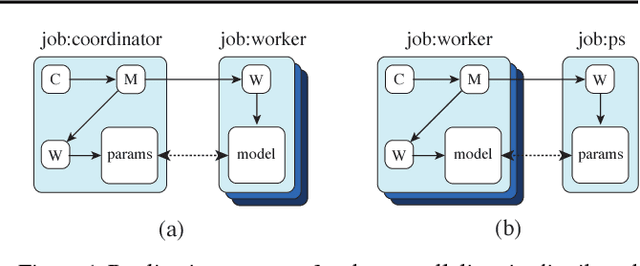

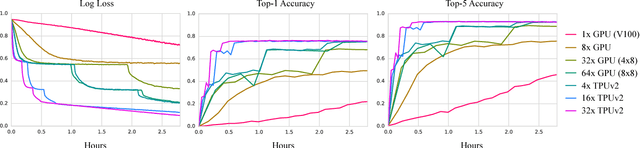
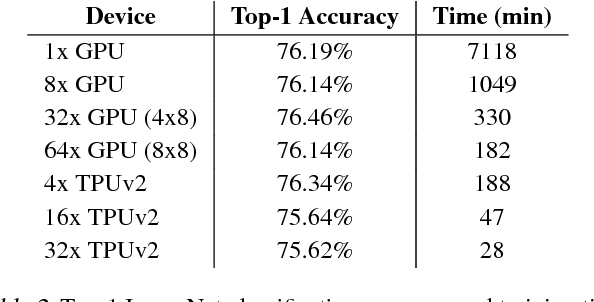
We describe TF-Replicator, a framework for distributed machine learning designed for DeepMind researchers and implemented as an abstraction over TensorFlow. TF-Replicator simplifies writing data-parallel and model-parallel research code. The same models can be effortlessly deployed to different cluster architectures (i.e. one or many machines containing CPUs, GPUs or TPU accelerators) using synchronous or asynchronous training regimes. To demonstrate the generality and scalability of TF-Replicator, we implement and benchmark three very different models: (1) A ResNet-50 for ImageNet classification, (2) a SN-GAN for class-conditional ImageNet image generation, and (3) a D4PG reinforcement learning agent for continuous control. Our results show strong scalability performance without demanding any distributed systems expertise of the user. The TF-Replicator programming model will be open-sourced as part of TensorFlow 2.0 (see https://github.com/tensorflow/community/pull/25).