 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical Search on Shelves with Efficient Stacking and Destacking of Objects
Jul 05, 2022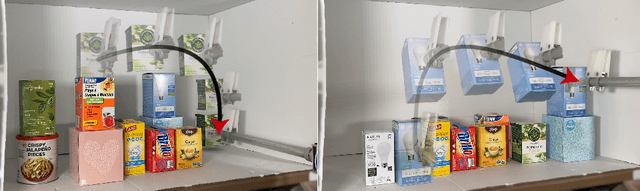
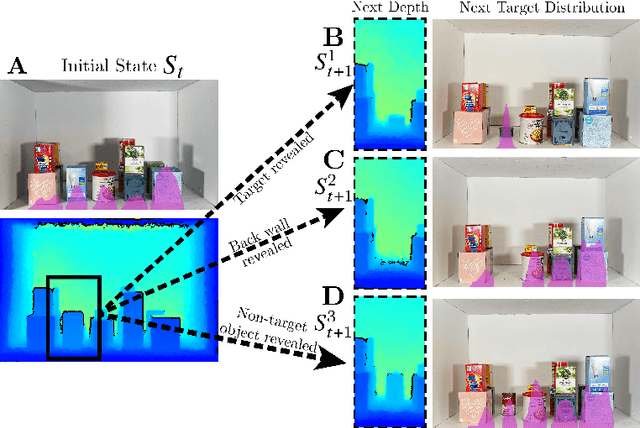
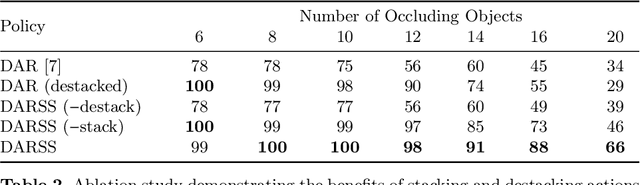
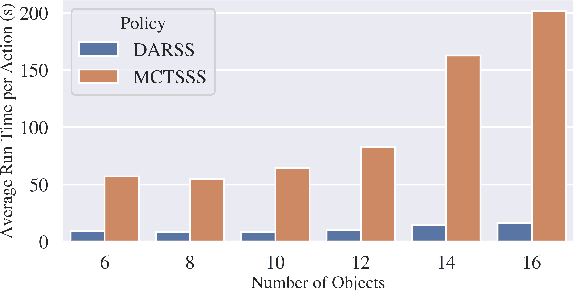
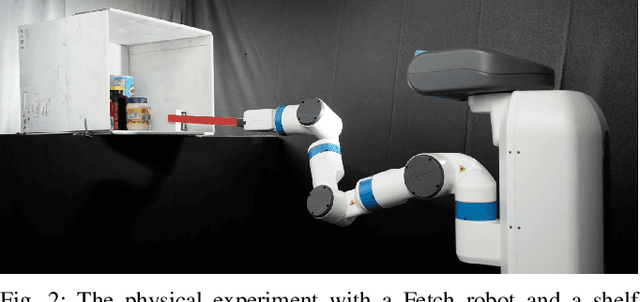
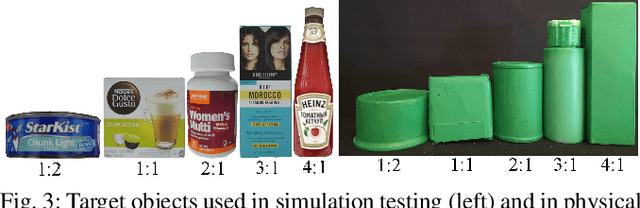
Stacking increases storage efficiency in shelves, but the lack of visibility and accessibility makes the mechanical search problem of revealing and extracting target objects difficult for robots. In this paper, we extend the lateral-access mechanical search problem to shelves with stacked items and introduce two novel policies -- Distribution Area Reduction for Stacked Scenes (DARSS) and Monte Carlo Tree Search for Stacked Scenes (MCTSSS) -- that use destacking and restacking actions. MCTSSS improves on prior lookahead policies by considering future states after each potential action. Experiments in 1200 simulated and 18 physical trials with a Fetch robot equipped with a blade and suction cup suggest that destacking and restacking actions can reveal the target object with 82--100% success in simulation and 66--100% in physical experiments, and are critical for searching densely packed shelves. In the simulation experiments, both policies outperform a baseline and achieve similar success rates but take more steps compared with an oracle policy that has full state information. In simulation and physical experiments, DARSS outperforms MCTSSS in median number of steps to reveal the target, but MCTSSS has a higher success rate in physical experiments, suggesting robustness to perception noise. See https://sites.google.com/berkeley.edu/stax-ray for supplementary material.
Optimal Shelf Arrangement to Minimize Robot Retrieval Time
Jun 17, 2022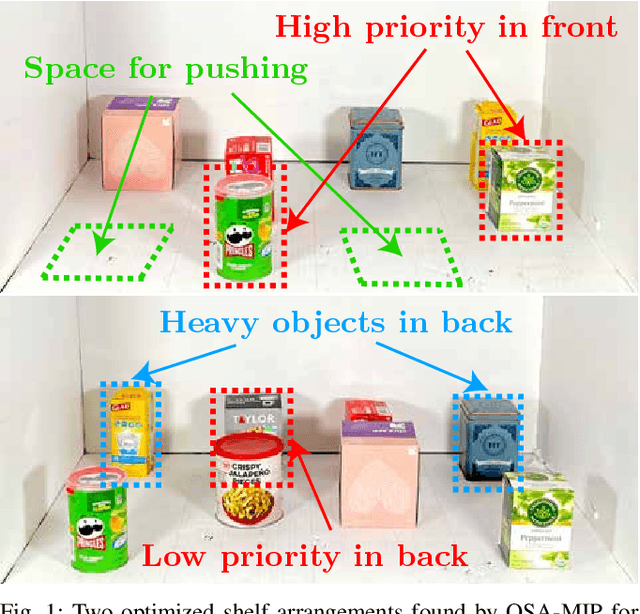
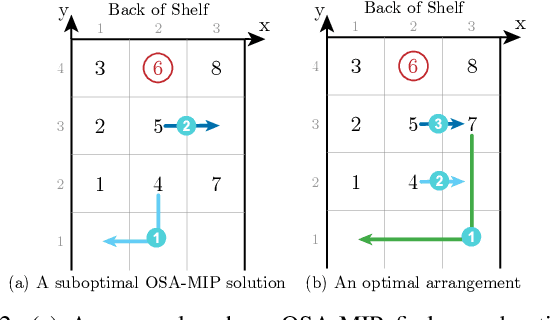
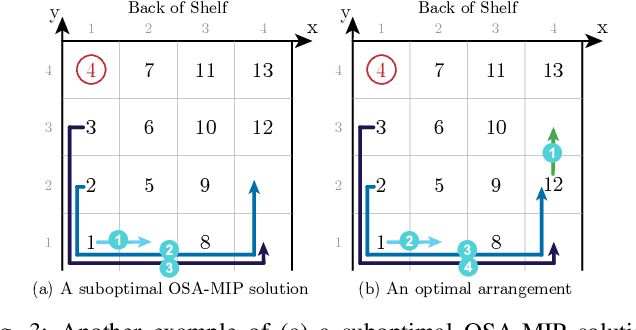
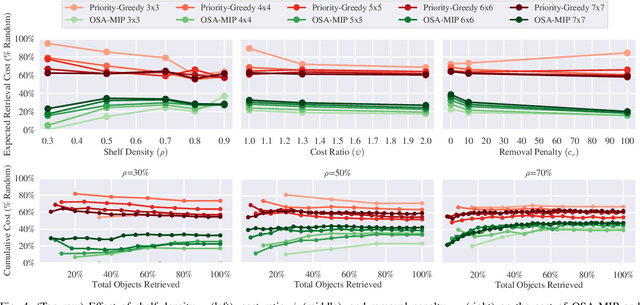
Shelves are commonly used to store objects in homes, stores, and warehouses. We formulate the problem of Optimal Shelf Arrangement (OSA), where the goal is to optimize the arrangement of objects on a shelf for access time given an access frequency and movement cost for each object. We propose OSA-MIP, a mixed-integer program (MIP), show that it finds an optimal solution for OSA under certain conditions, and provide bounds on its suboptimal solutions in general cost settings. We analytically characterize a necessary and sufficient shelf density condition for which there exists an arrangement such that any object can be retrieved without removing objects from the shelf. Experimental data from 1,575 simulated shelf trials and 54 trials with a physical Fetch robot equipped with a pushing blade and suction grasping tool suggest that arranging the objects optimally reduces the expected retrieval cost by 60-80% in fully-observed configurations and reduces the expected search cost by 50-70% while increasing the search success rate by up to 2x in partially-observed configurations.
FogROS 2: An Adaptive and Extensible Platform for Cloud and Fog Robotics Using ROS 2
May 19, 2022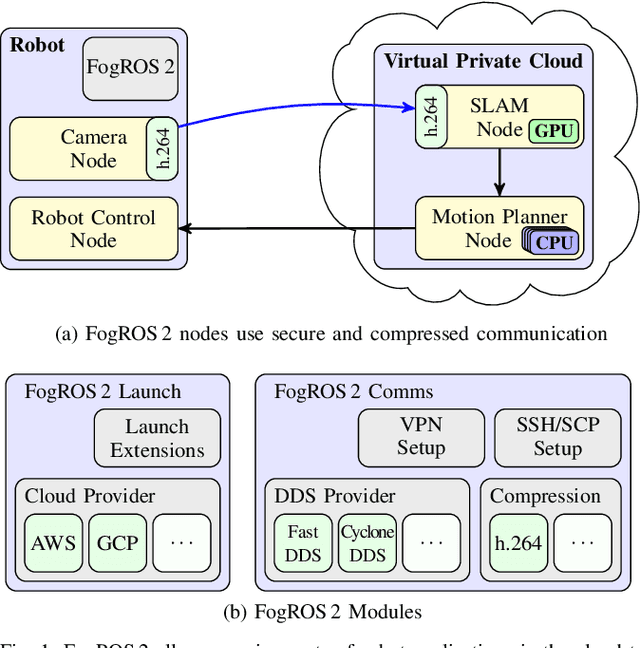
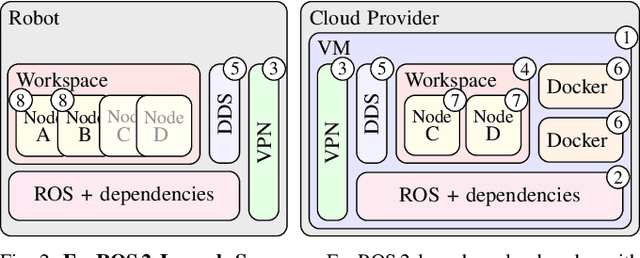
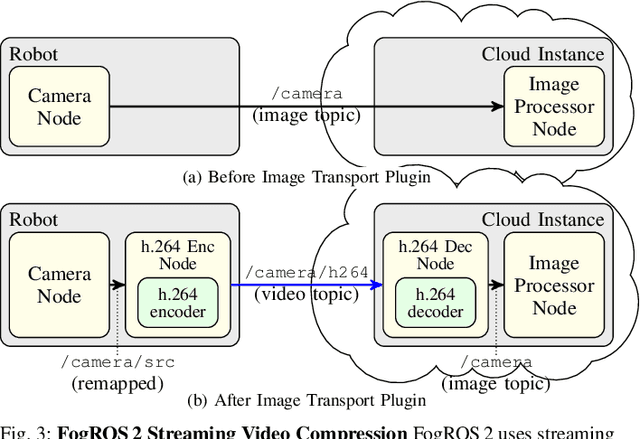
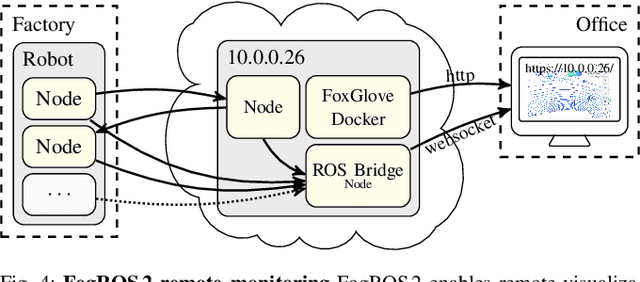
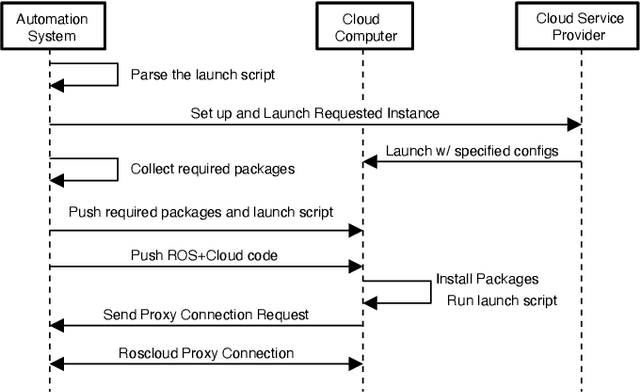
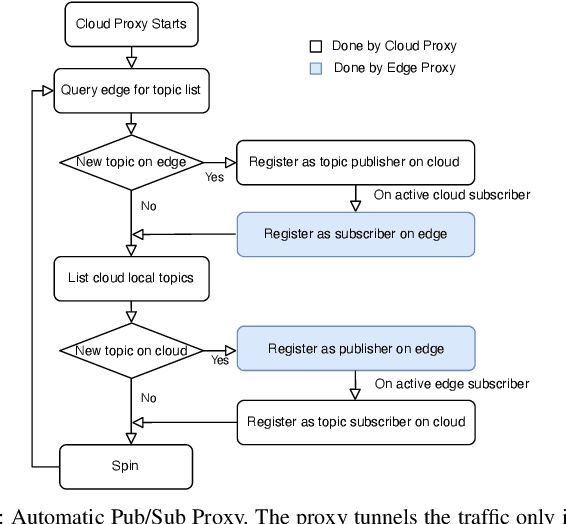
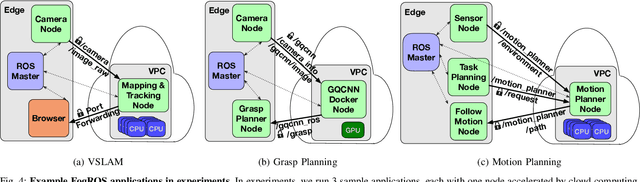
Mobility, power, and price points often dictate that robots do not have sufficient computing power on board to run modern robot algorithms at desired rates. Cloud computing providers such as AWS, GCP, and Azure offer immense computing power on demand, but tapping into that power from a robot is non-trivial. In this paper, we present FogROS 2, an easy-to-use, open-source platform to facilitate cloud and fog robotics compatible with the emerging ROS 2 standard, extending the open-source Robot Operating System (ROS). FogROS 2 provisions a cloud computer, deploys and launches ROS 2 nodes to the cloud computer, sets up secure networking between the robot and cloud, and starts the application running. FogROS 2 is completely redesigned and distinct from its predecessor to support ROS 2 applications, transparent video compression and communication, improved performance and security, support for multiple cloud-computing providers, and remote monitoring and visualization. We demonstrate in example applications that the performance gained by using cloud computers can overcome the network latency to significantly speed up robot performance. In examples, FogROS 2 reduces SLAM latency by 50%, reduces grasp planning time from 14s to 1.2s, and speeds up motion planning 28x. When compared to alternatives, FogROS 2 reduces network utilization by up to 3.8x. FogROS 2, source, examples, and documentation is available at https://github.com/BerkeleyAutomation/FogROS2 .
Mechanical Search on Shelves using a Novel "Bluction" Tool
Jan 22, 2022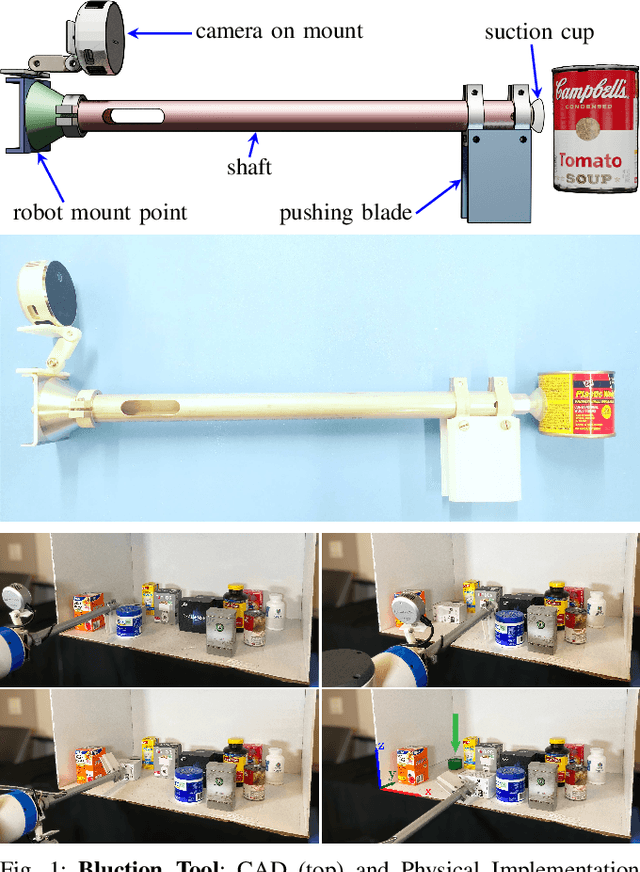
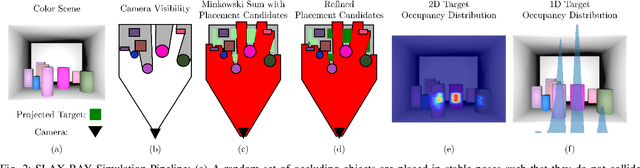
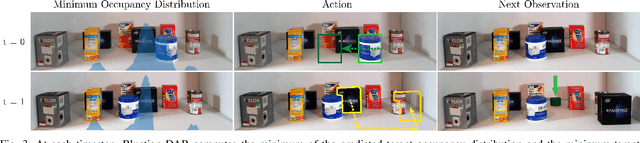
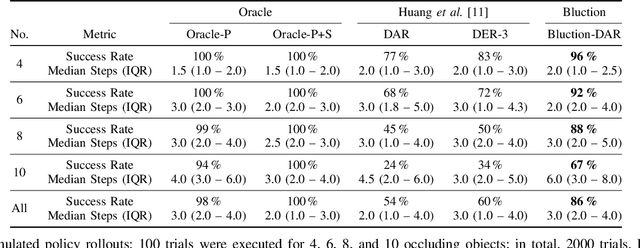
Shelves are common in homes, warehouses, and commercial settings due to their storage efficiency. However, this efficiency comes at the cost of reduced visibility and accessibility. When looking from a side (lateral) view of a shelf, most objects will be fully occluded, resulting in a constrained lateral-access mechanical search problem. To address this problem, we introduce: (1) a novel bluction tool, which combines a thin pushing blade and suction cup gripper, (2) an improved LAX-RAY simulation pipeline and perception model that combines ray-casting with 2D Minkowski sums to efficiently generate target occupancy distributions, and (3) a novel SLAX-RAY search policy, which optimally reduces target object distribution support area using the bluction tool. Experimental data from 2000 simulated shelf trials and 18 trials with a physical Fetch robot equipped with the bluction tool suggest that using suction grasping actions improves the success rate over the highest performing push-only policy by 26% in simulation and 67% in physical environments.
LEGS: Learning Efficient Grasp Sets for Exploratory Grasping
Nov 29, 2021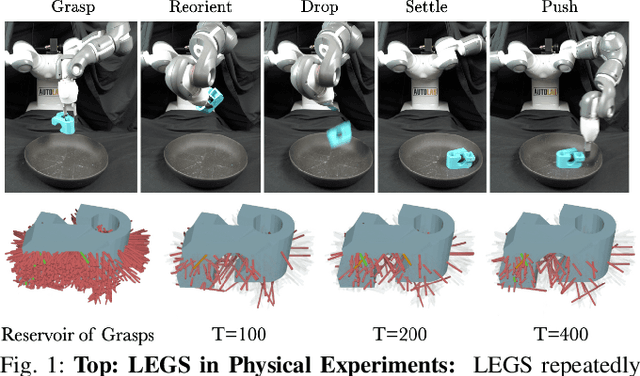
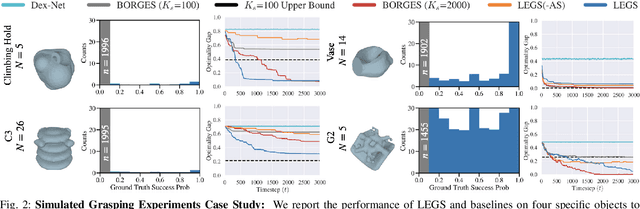
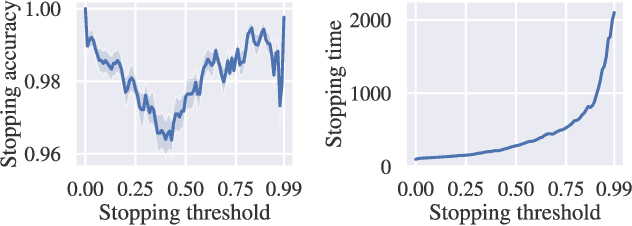
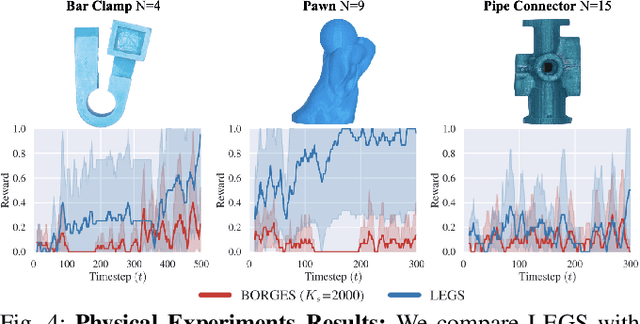
Previous work defined Exploratory Grasping, where a robot iteratively grasps and drops an unknown complex polyhedral object to discover a set of robust grasps for each recognizably distinct stable pose of the object. Recent work used a multi-armed bandit model with a small set of candidate grasps per pose; however, for objects with few successful grasps, this set may not include the most robust grasp. We present Learned Efficient Grasp Sets (LEGS), an algorithm that can efficiently explore thousands of possible grasps by constructing small active sets of promising grasps and uses learned confidence bounds to determine when, with high confidence, it can stop exploring the object. Experiments suggest that LEGS can identify a high-quality grasp more efficiently than prior algorithms which do not learn active sets. In simulation experiments, we measure the optimality gap between the success probability of the best grasp identified by LEGS and baselines and that of the true most robust grasp. After 3000 steps of exploration, LEGS outperforms baseline algorithms on 10 of the 14 Dex-Net Adversarial objects and 25 of the 39 EGAD! objects. We then develop a self-supervised grasping system, where the robot explores grasps with minimal human intervention. Physical experiments across 3 objects suggest that LEGS converges to high-performing grasps significantly faster than baselines. See \url{https://sites.google.com/view/legs-exp-grasping} for supplemental material and videos.
Simulation of Parallel-Jaw Grasping using Incremental Potential Contact Models
Nov 02, 2021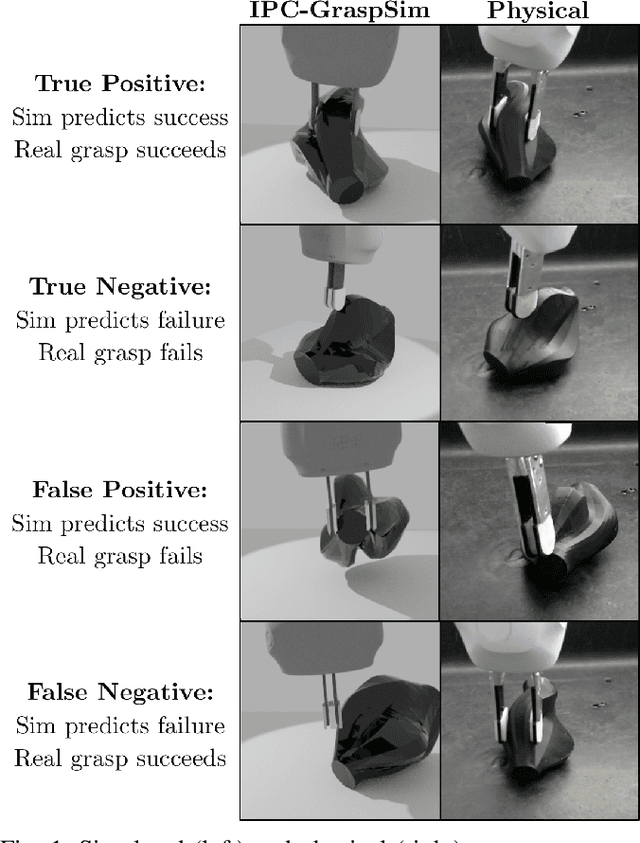
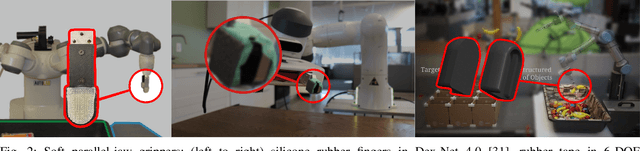
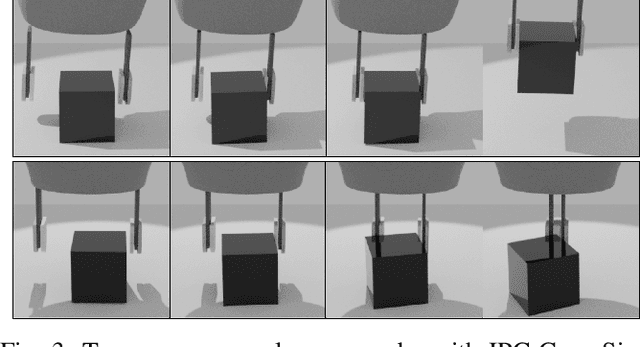
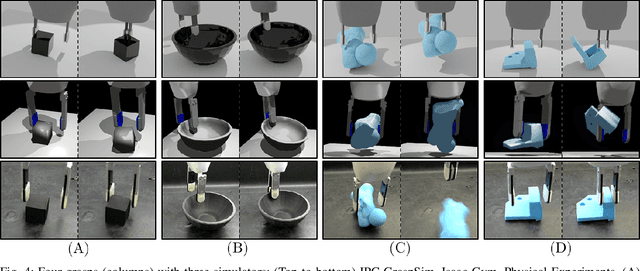
Soft compliant jaw tips are almost universally used with parallel-jaw robot grippers due to their ability to increase contact area and friction between the jaws and the object to be manipulated. However, interactions between the compliant surfaces and rigid objects are notoriously difficult to model. We introduce IPC-GraspSim, a novel simulator using Incremental Potential Contact (IPC) - a deformation model developed in 2020 for computer graphics - that models both the dynamics and the deformation of compliant jaw tips during grasping. IPC-GraspSim is evaluated using a set of 2,000 physical grasps across 16 adversarial objects where standard analytic models perform poorly. In comparison to both analytic quasistatic contact models (soft point contact, REACH, 6DFC) and dynamic grasp simulators (Isaac Gym with FleX backend), results suggest that IPC-GraspSim more accurately models real-world grasps, increasing F1 score by 9%. All data, code, videos, and supplementary material are available at https://sites.google.com/berkeley.edu/ipcgraspsim.
FogROS: An Adaptive Framework for Automating Fog Robotics Deployment
Aug 25, 2021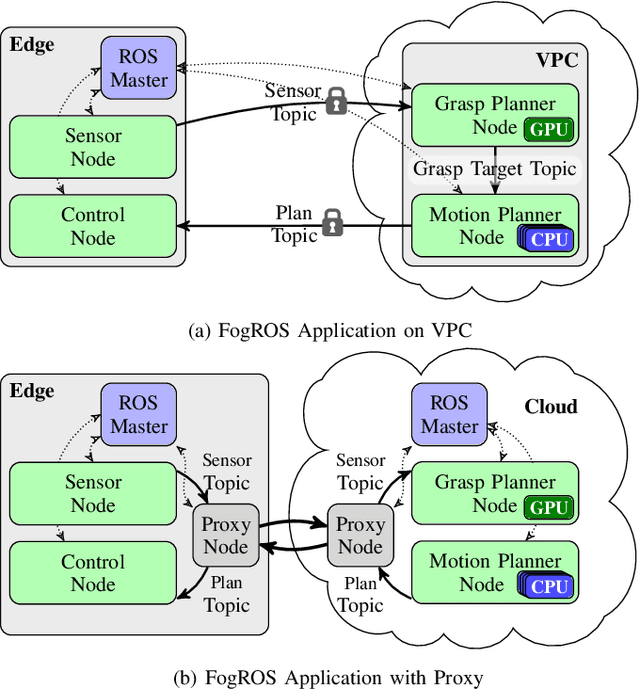
As many robot automation applications increasingly rely on multi-core processing or deep-learning models, cloud computing is becoming an attractive and economically viable resource for systems that do not contain high computing power onboard. Despite its immense computing capacity, it is often underused by the robotics and automation community due to lack of expertise in cloud computing and cloud-based infrastructure. Fog Robotics balances computing and data between cloud edge devices. We propose a software framework, FogROS, as an extension of the Robot Operating System (ROS), the de-facto standard for creating robot automation applications and components. It allows researchers to deploy components of their software to the cloud with minimal effort, and correspondingly gain access to additional computing cores, GPUs, FPGAs, and TPUs, as well as predeployed software made available by other researchers. FogROS allows a researcher to specify which components of their software will be deployed to the cloud and to what type of computing hardware. We evaluate FogROS on 3 examples: (1) simultaneous localization and mapping (ORB-SLAM2), (2) Dexterity Network (Dex-Net) GPU-based grasp planning, and (3) multi-core motion planning using a 96-core cloud-based server. In all three examples, a component is deployed to the cloud and accelerated with a small change in system launch configuration, while incurring additional latency of 1.2 s, 0.6 s, and 0.5 s due to network communication, the computation speed is improved by 2.6x, 6.0x and 34.2x, respectively. Code, videos, and supplementary material can be found at https://github.com/BerkeleyAutomation/FogROS.
Kit-Net: Self-Supervised Learning to Kit Novel 3D Objects into Novel 3D Cavities
Jul 13, 2021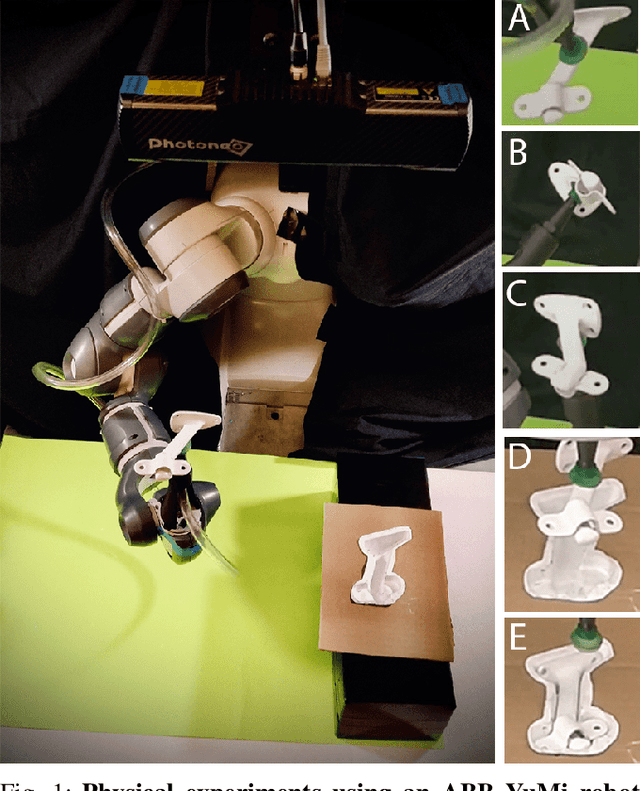

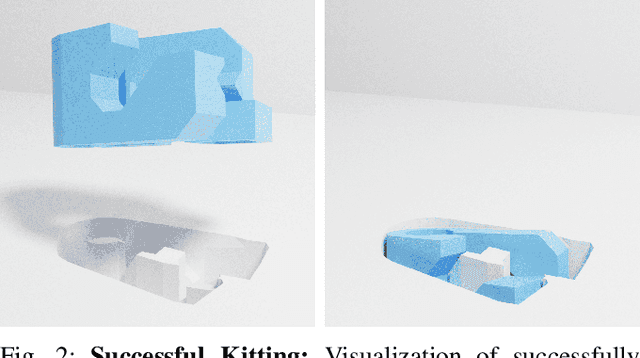
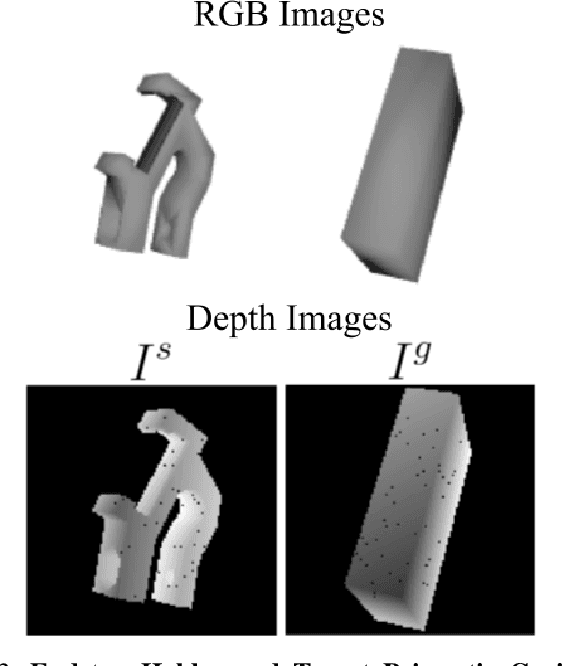
In industrial part kitting, 3D objects are inserted into cavities for transportation or subsequent assembly. Kitting is a critical step as it can decrease downstream processing and handling times and enable lower storage and shipping costs. We present Kit-Net, a framework for kitting previously unseen 3D objects into cavities given depth images of both the target cavity and an object held by a gripper in an unknown initial orientation. Kit-Net uses self-supervised deep learning and data augmentation to train a convolutional neural network (CNN) to robustly estimate 3D rotations between objects and matching concave or convex cavities using a large training dataset of simulated depth images pairs. Kit-Net then uses the trained CNN to implement a controller to orient and position novel objects for insertion into novel prismatic and conformal 3D cavities. Experiments in simulation suggest that Kit-Net can orient objects to have a 98.9% average intersection volume between the object mesh and that of the target cavity. Physical experiments with industrial objects succeed in 18% of trials using a baseline method and in 63% of trials with Kit-Net. Video, code, and data are available at https://github.com/BerkeleyAutomation/Kit-Net.
A Multi-Chamber Smart Suction Cup for Adaptive Gripping and Haptic Exploration
May 05, 2021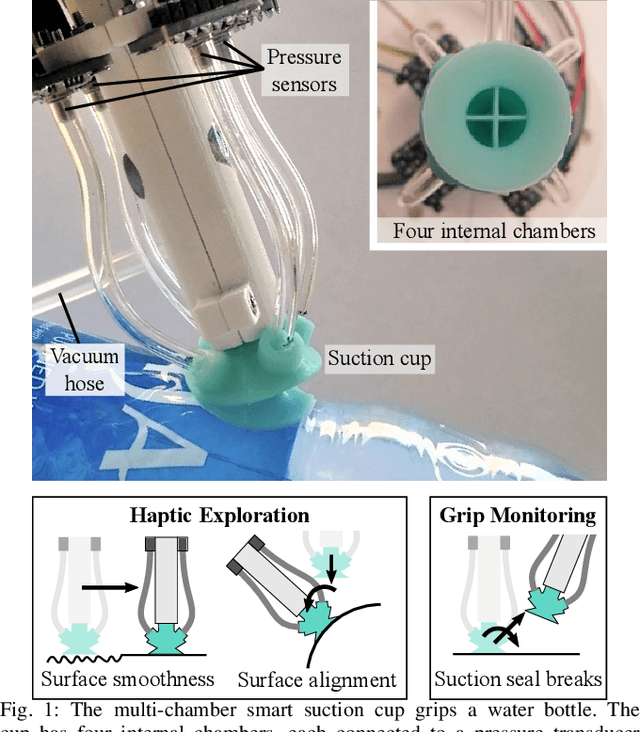
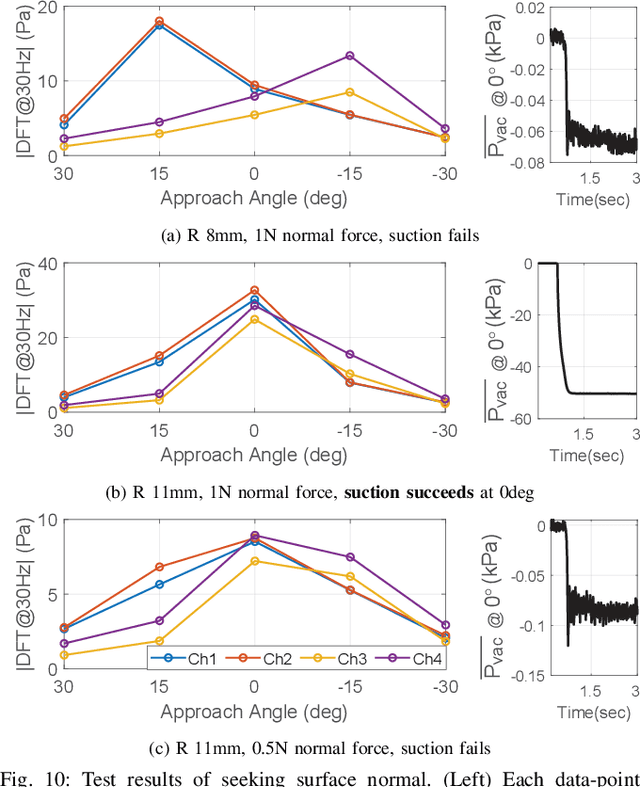
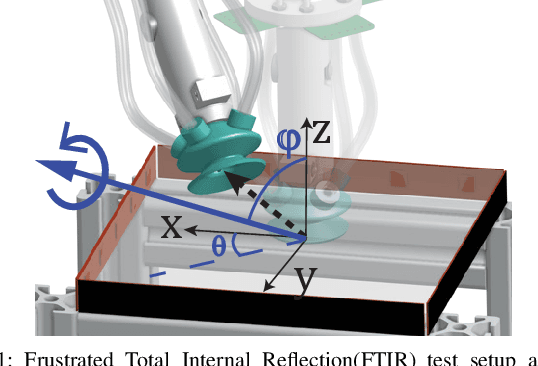
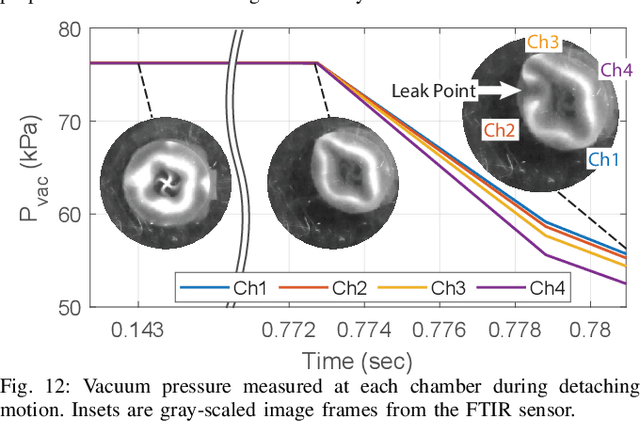
We present a novel robot end-effector for gripping and haptic exploration. Tactile sensing through suction flow monitoring is applied to a new suction cup design that contains multiple chambers for air flow. Each chamber connects with its own remote pressure transducer, which enables both absolute and differential pressure measures between chambers. By changing the overall vacuum applied to this smart suction cup, it can perform different functions such as gentle haptic exploration (low pressure) and monitoring breaks in the seal during strong astrictive gripping (high pressure). Haptic exploration of surfaces through sliding and palpation can guide the selection of suction grasp locations and help to identify the local surface geometry. During suction gripping, this design localizes breaks in the suction seal between four quadrants with up to 97% accuracy and detects breaks in the suction seal early enough to avoid total grasp failure.
Mechanical Search on Shelves using Lateral Access X-RAY
Nov 23, 2020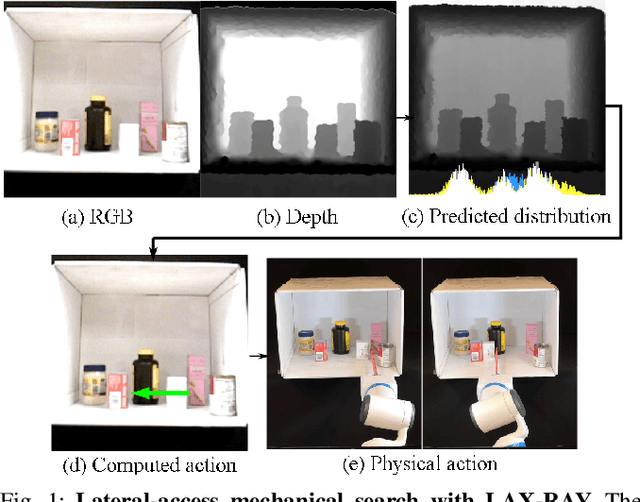

Efficiently finding an occluded object with lateral access arises in many contexts such as warehouses, retail, healthcare, shipping, and homes. We introduce LAX-RAY (Lateral Access maXimal Reduction of occupancY support Area), a system to automate the mechanical search for occluded objects on shelves. For such lateral access environments, LAX-RAY couples a perception pipeline predicting a target object occupancy support distribution with a mechanical search policy that sequentially selects occluding objects to push to the side to reveal the target as efficiently as possible. Within the context of extruded polygonal objects and a stationary target with a known aspect ratio, we explore three lateral access search policies: Distribution Area Reduction (DAR), Distribution Entropy Reduction (DER), and Distribution Entropy Reduction over Multiple Time Steps (DER-MT) utilizing the support distribution and prior information. We evaluate these policies using the First-Order Shelf Simulator (FOSS) in which we simulate 800 random shelf environments of varying difficulty, and in a physical shelf environment with a Fetch robot and an embedded PrimeSense RGBD Camera. Average simulation results of 87.3% success rate demonstrate better performance of DER-MT with 2 prediction steps. When deployed on the robot, results show a success rate of at least 80% for all policies, suggesting that LAX-RAY can efficiently reveal the target object in reality. Both results show significantly better performance of the three proposed policies compared to a baseline policy with uniform probability distribution assumption in non-trivial cases, showing the importance of distribution prediction. Code, videos, and supplementary material can be found at https://sites.google.com/berkeley.edu/lax-ray.