 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProtecting participants or population? Comparison of k-anonymous Origin-Destination matrices
Sep 16, 2025Origin-Destination (OD) matrices are a core component of research on users' mobility and summarize how individuals move between geographical regions. These regions should be small enough to be representative of user mobility, without incurring substantial privacy risks. There are two added values of the NetMob2025 challenge dataset. Firstly, the data is extensive and contains a lot of socio-demographic information that can be used to create multiple OD matrices, based on the segments of the population. Secondly, a participant is not merely a record in the data, but a statistically weighted proxy for a segment of the real population. This opens the door to a fundamental shift in the anonymization paradigm. A population-based view of privacy is central to our contribution. By adjusting our anonymization framework to account for representativeness, we are also protecting the inferred identity of the actual population, rather than survey participants alone. The challenge addressed in this work is to produce and compare OD matrices that are k-anonymous for survey participants and for the whole population. We compare several traditional methods of anonymization to k-anonymity by generalizing geographical areas. These include generalization over a hierarchy (ATG and OIGH) and the classical Mondrian. To this established toolkit, we add a novel method, i.e., ODkAnon, a greedy algorithm aiming at balancing speed and quality. Unlike previous approaches, which primarily address the privacy aspects of the given datasets, we aim to contribute to the generation of privacy-preserving OD matrices enriched with socio-demographic segmentation that achieves k-anonymity on the actual population.
Effective Predictive Modeling for Emergency Department Visits and Evaluating Exogenous Variables Impact: Using Explainable Meta-learning Gradient Boosting
Nov 18, 2024



Over an extensive duration, administrators and clinicians have endeavoured to predict Emergency Department (ED) visits with precision, aiming to optimise resource distribution. Despite the proliferation of diverse AI-driven models tailored for precise prognostication, this task persists as a formidable challenge, besieged by constraints such as restrained generalisability, susceptibility to overfitting and underfitting, scalability issues, and complex fine-tuning hyper-parameters. In this study, we introduce a novel Meta-learning Gradient Booster (Meta-ED) approach for precisely forecasting daily ED visits and leveraging a comprehensive dataset of exogenous variables, including socio-demographic characteristics, healthcare service use, chronic diseases, diagnosis, and climate parameters spanning 23 years from Canberra Hospital in ACT, Australia. The proposed Meta-ED consists of four foundational learners-Catboost, Random Forest, Extra Tree, and lightGBoost-alongside a dependable top-level learner, Multi-Layer Perceptron (MLP), by combining the unique capabilities of varied base models (sub-learners). Our study assesses the efficacy of the Meta-ED model through an extensive comparative analysis involving 23 models. The evaluation outcomes reveal a notable superiority of Meta-ED over the other models in accuracy at 85.7% (95% CI ;85.4%, 86.0%) and across a spectrum of 10 evaluation metrics. Notably, when compared with prominent techniques, XGBoost, Random Forest (RF), AdaBoost, LightGBoost, and Extra Tree (ExT), Meta-ED showcases substantial accuracy enhancements of 58.6%, 106.3%, 22.3%, 7.0%, and 15.7%, respectively. Furthermore, incorporating weather-related features demonstrates a 3.25% improvement in the prediction accuracy of visitors' numbers. The encouraging outcomes of our study underscore Meta-ED as a foundation model for the precise prediction of daily ED visitors.
FogROS: An Adaptive Framework for Automating Fog Robotics Deployment
Aug 25, 2021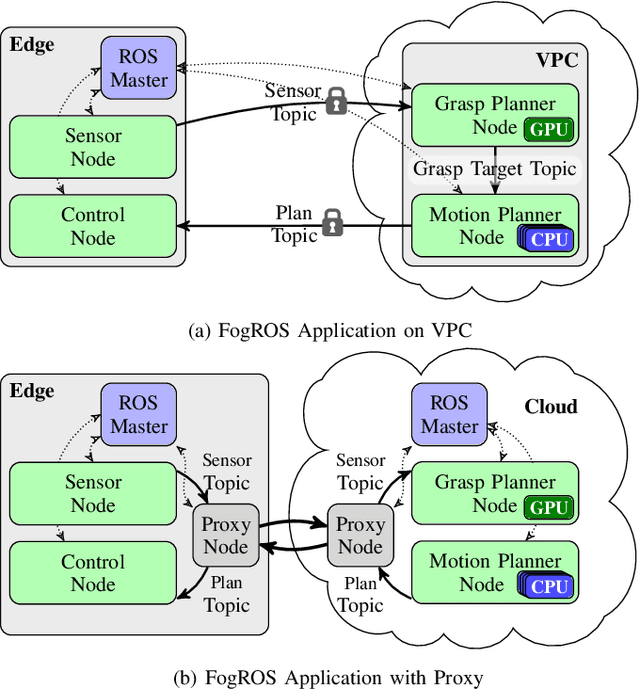
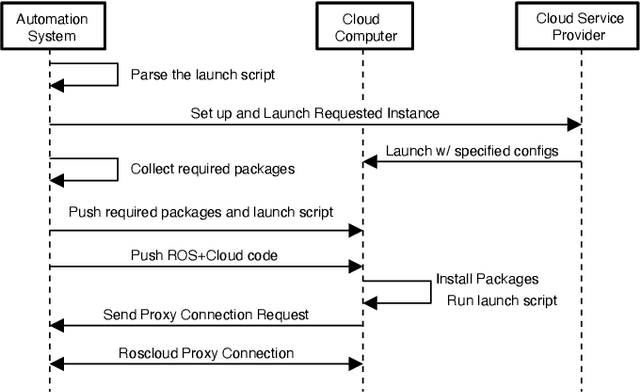
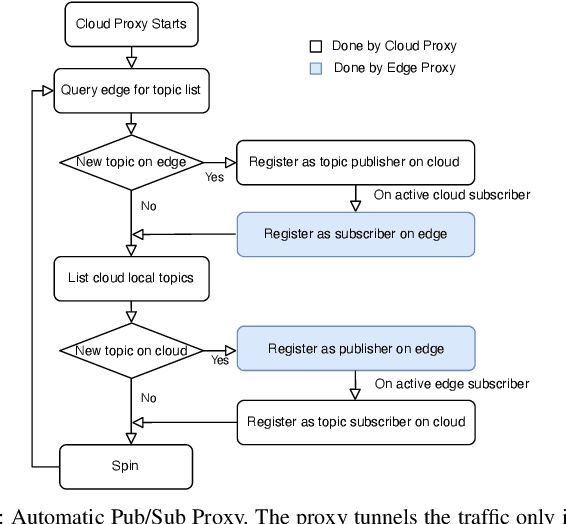
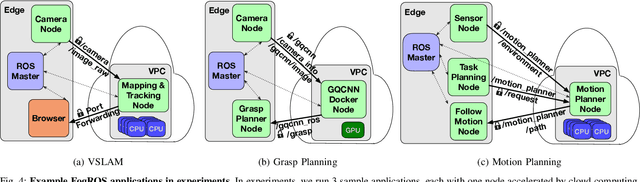
As many robot automation applications increasingly rely on multi-core processing or deep-learning models, cloud computing is becoming an attractive and economically viable resource for systems that do not contain high computing power onboard. Despite its immense computing capacity, it is often underused by the robotics and automation community due to lack of expertise in cloud computing and cloud-based infrastructure. Fog Robotics balances computing and data between cloud edge devices. We propose a software framework, FogROS, as an extension of the Robot Operating System (ROS), the de-facto standard for creating robot automation applications and components. It allows researchers to deploy components of their software to the cloud with minimal effort, and correspondingly gain access to additional computing cores, GPUs, FPGAs, and TPUs, as well as predeployed software made available by other researchers. FogROS allows a researcher to specify which components of their software will be deployed to the cloud and to what type of computing hardware. We evaluate FogROS on 3 examples: (1) simultaneous localization and mapping (ORB-SLAM2), (2) Dexterity Network (Dex-Net) GPU-based grasp planning, and (3) multi-core motion planning using a 96-core cloud-based server. In all three examples, a component is deployed to the cloud and accelerated with a small change in system launch configuration, while incurring additional latency of 1.2 s, 0.6 s, and 0.5 s due to network communication, the computation speed is improved by 2.6x, 6.0x and 34.2x, respectively. Code, videos, and supplementary material can be found at https://github.com/BerkeleyAutomation/FogROS.