 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobo-DM: Data Management For Large Robot Datasets
May 21, 2025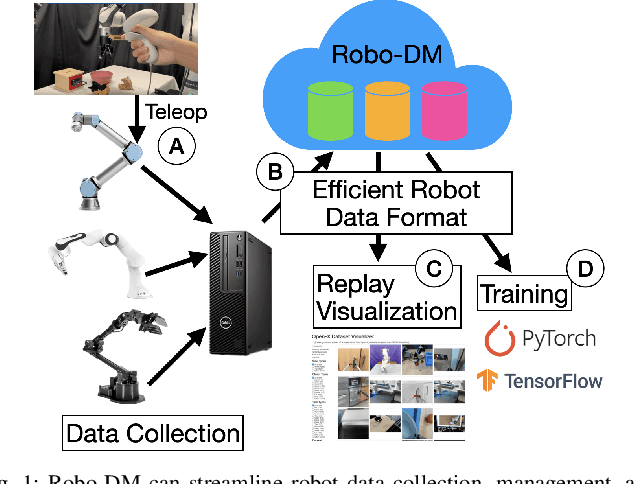
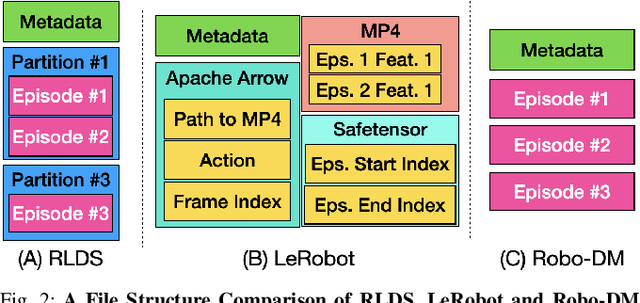
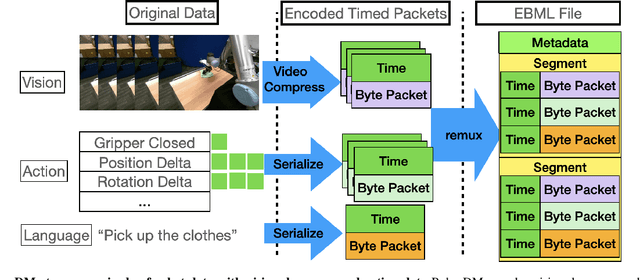
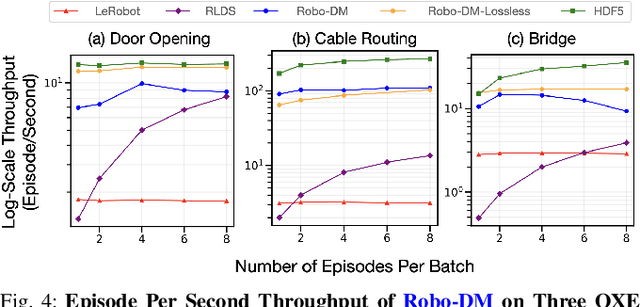
Recent results suggest that very large datasets of teleoperated robot demonstrations can be used to train transformer-based models that have the potential to generalize to new scenes, robots, and tasks. However, curating, distributing, and loading large datasets of robot trajectories, which typically consist of video, textual, and numerical modalities - including streams from multiple cameras - remains challenging. We propose Robo-DM, an efficient open-source cloud-based data management toolkit for collecting, sharing, and learning with robot data. With Robo-DM, robot datasets are stored in a self-contained format with Extensible Binary Meta Language (EBML). Robo-DM can significantly reduce the size of robot trajectory data, transfer costs, and data load time during training. Compared to the RLDS format used in OXE datasets, Robo-DM's compression saves space by up to 70x (lossy) and 3.5x (lossless). Robo-DM also accelerates data retrieval by load-balancing video decoding with memory-mapped decoding caches. Compared to LeRobot, a framework that also uses lossy video compression, Robo-DM is up to 50x faster when decoding sequentially. We physically evaluate a model trained by Robo-DM with lossy compression, a pick-and-place task, and In-Context Robot Transformer. Robo-DM uses 75x compression of the original dataset and does not suffer reduction in downstream task accuracy.
FogROS2-FT: Fault Tolerant Cloud Robotics
Dec 06, 2024



Cloud robotics enables robots to offload complex computational tasks to cloud servers for performance and ease of management. However, cloud compute can be costly, cloud services can suffer occasional downtime, and connectivity between the robot and cloud can be prone to variations in network Quality-of-Service (QoS). We present FogROS2-FT (Fault Tolerant) to mitigate these issues by introducing a multi-cloud extension that automatically replicates independent stateless robotic services, routes requests to these replicas, and directs the first response back. With replication, robots can still benefit from cloud computations even when a cloud service provider is down or there is low QoS. Additionally, many cloud computing providers offer low-cost spot computing instances that may shutdown unpredictably. Normally, these low-cost instances would be inappropriate for cloud robotics, but the fault tolerance nature of FogROS2-FT allows them to be used reliably. We demonstrate FogROS2-FT fault tolerance capabilities in 3 cloud-robotics scenarios in simulation (visual object detection, semantic segmentation, motion planning) and 1 physical robot experiment (scan-pick-and-place). Running on the same hardware specification, FogROS2-FT achieves motion planning with up to 2.2x cost reduction and up to a 5.53x reduction on 99 Percentile (P99) long-tail latency. FogROS2-FT reduces the P99 long-tail latency of object detection and semantic segmentation by 2.0x and 2.1x, respectively, under network slowdown and resource contention.
FogROS2-PLR: Probabilistic Latency-Reliability For Cloud Robotics
Oct 07, 2024



Cloud robotics enables robots to offload computationally intensive tasks to cloud servers for performance, cost, and ease of management. However, the network and cloud computing infrastructure are not designed for reliable timing guarantees, due to fluctuating Quality-of-Service (QoS). In this work, we formulate an impossibility triangle theorem for: Latency reliability, Singleton server, and Commodity hardware. The LSC theorem suggests that providing replicated servers with uncorrelated failures can exponentially reduce the probability of missing a deadline. We present FogROS2-Probabilistic Latency Reliability (PLR) that uses multiple independent network interfaces to send requests to replicated cloud servers and uses the first response back. We design routing mechanisms to discover, connect, and route through non-default network interfaces on robots. FogROS2-PLR optimizes the selection of interfaces to servers to minimize the probability of missing a deadline. We conduct a cloud-connected driving experiment with two 5G service providers, demonstrating FogROS2-PLR effectively provides smooth service quality even if one of the service providers experiences low coverage and base station handover. We use 99 Percentile (P99) latency to evaluate anomalous long-tail latency behavior. In one experiment, FogROS2-PLR improves P99 latency by up to 3.7x compared to using one service provider. We deploy FogROS2-PLR on a physical Stretch 3 robot performing an indoor human-tracking task. Even in a fully covered Wi-Fi and 5G environment, FogROS2-PLR improves the responsiveness of the robot reducing mean latency by 36% and P99 latency by 33%.
FogROS2-Sky: Optimizing Latency and Cost for Multi-Cloud Robot Applications
Nov 09, 2023This paper studies the cost-performance tradeoffs in cloud robotics with heterogeneous cloud service providers, which have complex pricing models and varying application requirements. We present FogROS2-Sky, a cost-efficient open source robotics platform that offloads unmodified ROS2 applications to multiple cloud providers and enables fine-grained cost analysis for ROS2 applications' communication with multiple cloud providers. As each provider offers different options for CPU, GPU, memory, and latency, it can be very difficult for users to decide which to choose. FogROS2-Sky includes an optimization algorithm, which either finds the best available hardware specification that fulfills the user's latency and cost constraints or reports that such a specification does not exist. We use FogROS2-Sky to perform time-cost analysis on three robotics applications: visual SLAM, grasp planning, and motion planning. We are able to sample different hardware setups at nearly half the cost while still create cost and latency functions suitable for the optimizer. We also evaluate the optimizer's efficacy for these applications with the Pareto frontier and show that the optimizer selects efficient hardware configurations to balance cost and latency. Videos and code are available on the website https://sites.google.com/view/fogros2-sky
FogROS2-SGC: A ROS2 Cloud Robotics Platform for Secure Global Connectivity
Jun 29, 2023



The Robot Operating System (ROS2) is the most widely used software platform for building robotics applications. FogROS2 extends ROS2 to allow robots to access cloud computing on demand. However, ROS2 and FogROS2 assume that all robots are locally connected and that each robot has full access and control of the other robots. With applications like distributed multi-robot systems, remote robot control, and mobile robots, robotics increasingly involves the global Internet and complex trust management. Existing approaches for connecting disjoint ROS2 networks lack key features such as security, compatibility, efficiency, and ease of use. We introduce FogROS2-SGC, an extension of FogROS2 that can effectively connect robot systems across different physical locations, networks, and Data Distribution Services (DDS). With globally unique and location-independent identifiers, FogROS2-SGC securely and efficiently routes data between robotics components around the globe. FogROS2-SGC is agnostic to the ROS2 distribution and configuration, is compatible with non-ROS2 software, and seamlessly extends existing ROS2 applications without any code modification. Experiments suggest FogROS2-SGC is 19x faster than rosbridge (a ROS2 package with comparable features, but lacking security). We also apply FogROS2-SGC to 4 robots and compute nodes that are 3600km apart. Videos and code are available on the project website https://sites.google.com/view/fogros2-sgc.
Improving Quantum Circuit Synthesis with Machine Learning
Jun 09, 2023



In the Noisy Intermediate Scale Quantum (NISQ) era, finding implementations of quantum algorithms that minimize the number of expensive and error prone multi-qubit gates is vital to ensure computations produce meaningful outputs. Unitary synthesis, the process of finding a quantum circuit that implements some target unitary matrix, is able to solve this problem optimally in many cases. However, current bottom-up unitary synthesis algorithms are limited by their exponentially growing run times. We show how applying machine learning to unitary datasets permits drastic speedups for synthesis algorithms. This paper presents QSeed, a seeded synthesis algorithm that employs a learned model to quickly propose resource efficient circuit implementations of unitaries. QSeed maintains low gate counts and offers a speedup of $3.7\times$ in synthesis time over the state of the art for a 64 qubit modular exponentiation circuit, a core component in Shor's factoring algorithm. QSeed's performance improvements also generalize to families of circuits not seen during the training process.
FogROS 2: An Adaptive and Extensible Platform for Cloud and Fog Robotics Using ROS 2
May 19, 2022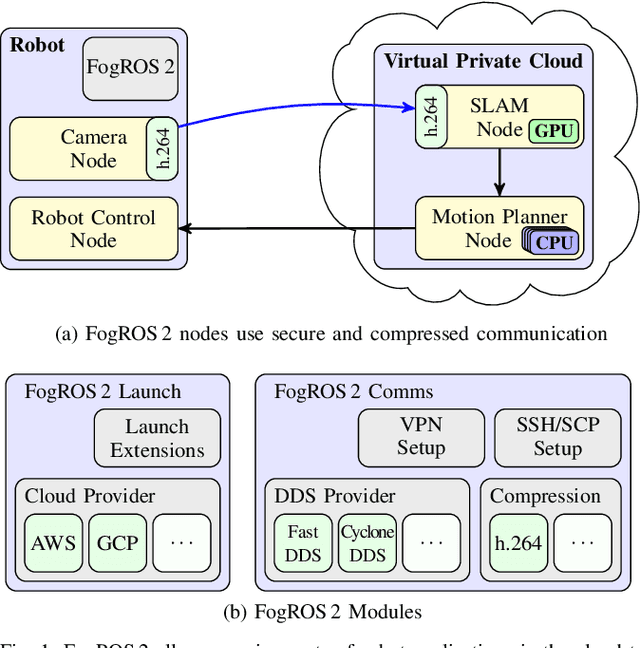
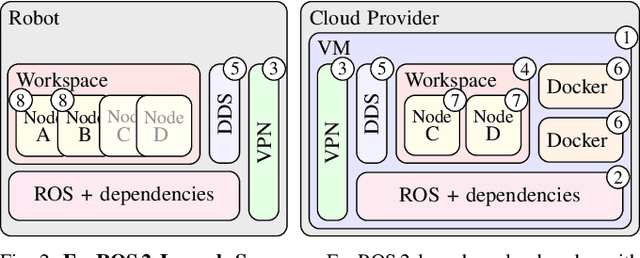
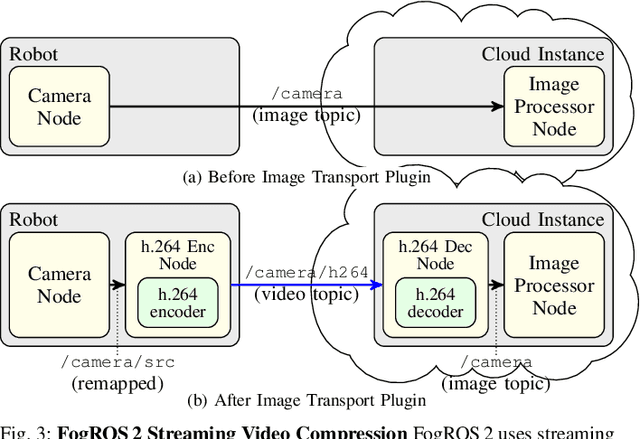
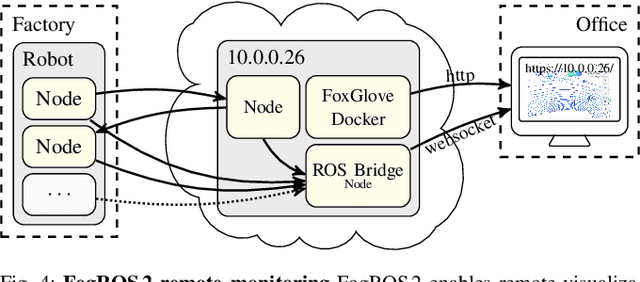
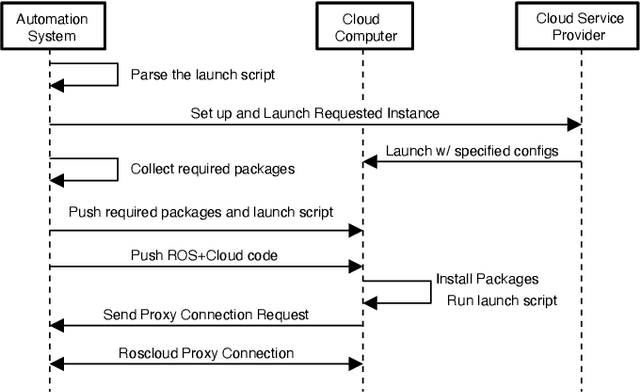
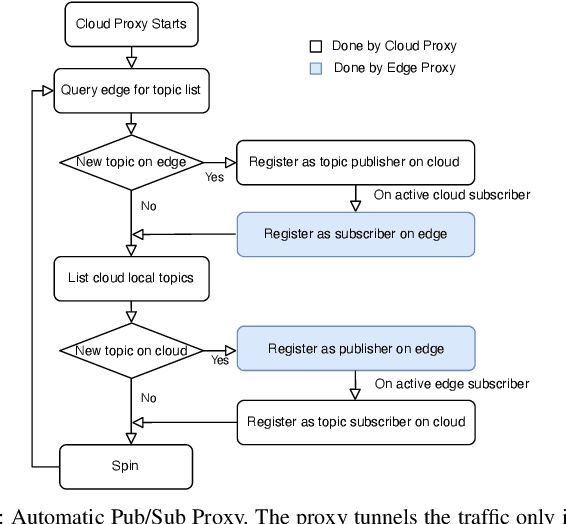
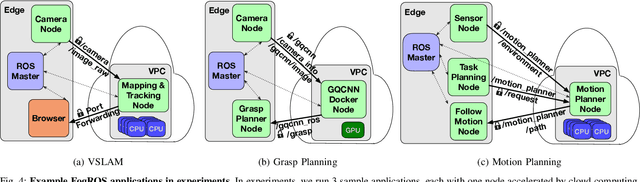
Mobility, power, and price points often dictate that robots do not have sufficient computing power on board to run modern robot algorithms at desired rates. Cloud computing providers such as AWS, GCP, and Azure offer immense computing power on demand, but tapping into that power from a robot is non-trivial. In this paper, we present FogROS 2, an easy-to-use, open-source platform to facilitate cloud and fog robotics compatible with the emerging ROS 2 standard, extending the open-source Robot Operating System (ROS). FogROS 2 provisions a cloud computer, deploys and launches ROS 2 nodes to the cloud computer, sets up secure networking between the robot and cloud, and starts the application running. FogROS 2 is completely redesigned and distinct from its predecessor to support ROS 2 applications, transparent video compression and communication, improved performance and security, support for multiple cloud-computing providers, and remote monitoring and visualization. We demonstrate in example applications that the performance gained by using cloud computers can overcome the network latency to significantly speed up robot performance. In examples, FogROS 2 reduces SLAM latency by 50%, reduces grasp planning time from 14s to 1.2s, and speeds up motion planning 28x. When compared to alternatives, FogROS 2 reduces network utilization by up to 3.8x. FogROS 2, source, examples, and documentation is available at https://github.com/BerkeleyAutomation/FogROS2 .
FogROS: An Adaptive Framework for Automating Fog Robotics Deployment
Aug 25, 2021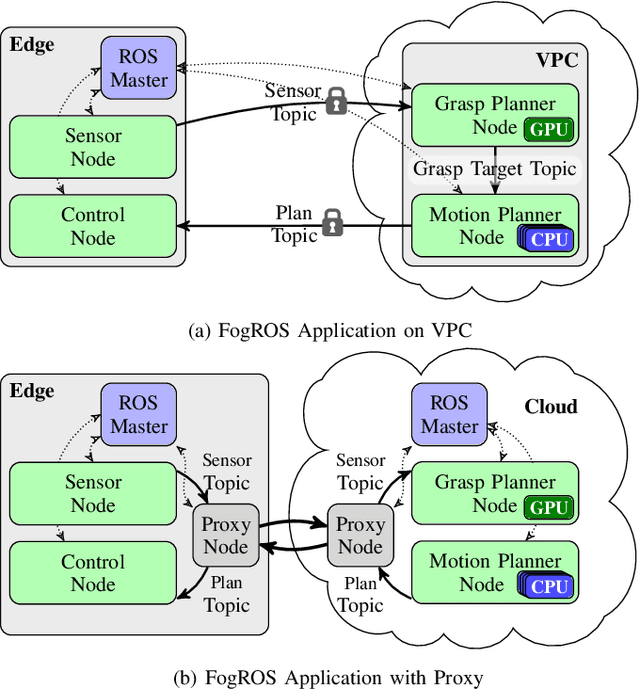
As many robot automation applications increasingly rely on multi-core processing or deep-learning models, cloud computing is becoming an attractive and economically viable resource for systems that do not contain high computing power onboard. Despite its immense computing capacity, it is often underused by the robotics and automation community due to lack of expertise in cloud computing and cloud-based infrastructure. Fog Robotics balances computing and data between cloud edge devices. We propose a software framework, FogROS, as an extension of the Robot Operating System (ROS), the de-facto standard for creating robot automation applications and components. It allows researchers to deploy components of their software to the cloud with minimal effort, and correspondingly gain access to additional computing cores, GPUs, FPGAs, and TPUs, as well as predeployed software made available by other researchers. FogROS allows a researcher to specify which components of their software will be deployed to the cloud and to what type of computing hardware. We evaluate FogROS on 3 examples: (1) simultaneous localization and mapping (ORB-SLAM2), (2) Dexterity Network (Dex-Net) GPU-based grasp planning, and (3) multi-core motion planning using a 96-core cloud-based server. In all three examples, a component is deployed to the cloud and accelerated with a small change in system launch configuration, while incurring additional latency of 1.2 s, 0.6 s, and 0.5 s due to network communication, the computation speed is improved by 2.6x, 6.0x and 34.2x, respectively. Code, videos, and supplementary material can be found at https://github.com/BerkeleyAutomation/FogROS.
A Fog Robotics Approach to Deep Robot Learning: Application to Object Recognition and Grasp Planning in Surface Decluttering
Mar 22, 2019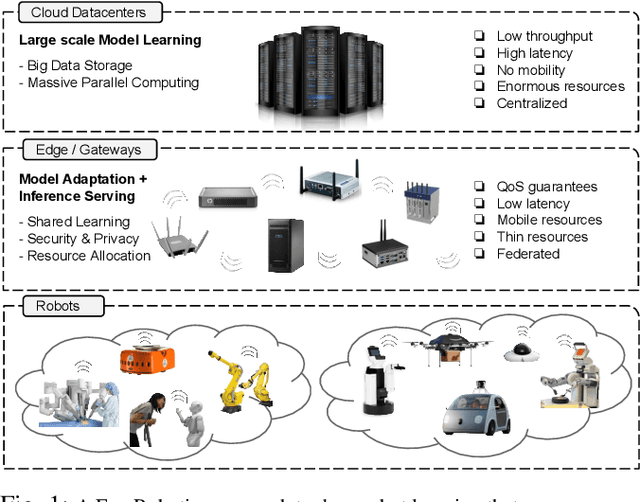
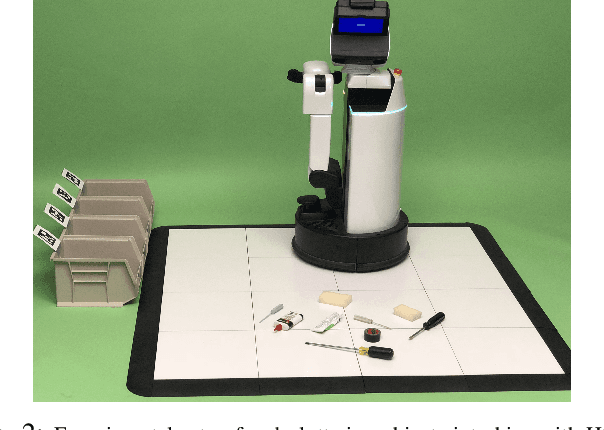
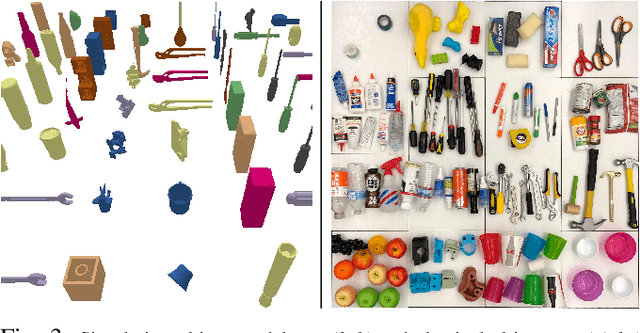
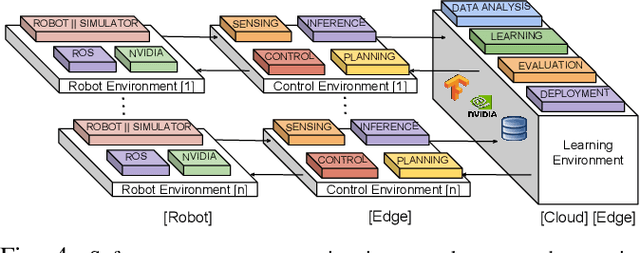
The growing demand of industrial, automotive and service robots presents a challenge to the centralized Cloud Robotics model in terms of privacy, security, latency, bandwidth, and reliability. In this paper, we present a `Fog Robotics' approach to deep robot learning that distributes compute, storage and networking resources between the Cloud and the Edge in a federated manner. Deep models are trained on non-private (public) synthetic images in the Cloud; the models are adapted to the private real images of the environment at the Edge within a trusted network and subsequently, deployed as a service for low-latency and secure inference/prediction for other robots in the network. We apply this approach to surface decluttering, where a mobile robot picks and sorts objects from a cluttered floor by learning a deep object recognition and a grasp planning model. Experiments suggest that Fog Robotics can improve performance by sim-to-real domain adaptation in comparison to exclusively using Cloud or Edge resources, while reducing the inference cycle time by 4\times to successfully declutter 86% of objects over 213 attempts.