 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLANGTRAJ: Diffusion Model and Dataset for Language-Conditioned Trajectory Simulation
Apr 15, 2025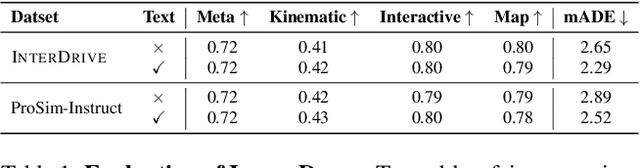
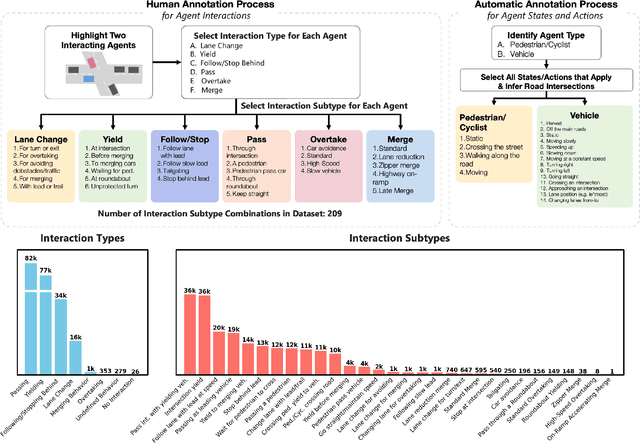
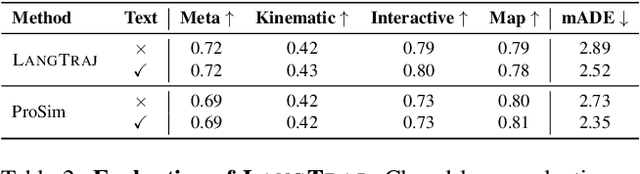
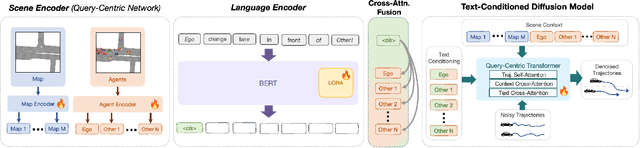
Evaluating autonomous vehicles with controllability enables scalable testing in counterfactual or structured settings, enhancing both efficiency and safety. We introduce LangTraj, a language-conditioned scene-diffusion model that simulates the joint behavior of all agents in traffic scenarios. By conditioning on natural language inputs, LangTraj provides flexible and intuitive control over interactive behaviors, generating nuanced and realistic scenarios. Unlike prior approaches that depend on domain-specific guidance functions, LangTraj incorporates language conditioning during training, facilitating more intuitive traffic simulation control. We propose a novel closed-loop training strategy for diffusion models, explicitly tailored to enhance stability and realism during closed-loop simulation. To support language-conditioned simulation, we develop Inter-Drive, a large-scale dataset with diverse and interactive labels for training language-conditioned diffusion models. Our dataset is built upon a scalable pipeline for annotating agent-agent interactions and single-agent behaviors, ensuring rich and varied supervision. Validated on the Waymo Motion Dataset, LangTraj demonstrates strong performance in realism, language controllability, and language-conditioned safety-critical simulation, establishing a new paradigm for flexible and scalable autonomous vehicle testing.
REMAC: Self-Reflective and Self-Evolving Multi-Agent Collaboration for Long-Horizon Robot Manipulation
Mar 28, 2025



Vision-language models (VLMs) have demonstrated remarkable capabilities in robotic planning, particularly for long-horizon tasks that require a holistic understanding of the environment for task decomposition. Existing methods typically rely on prior environmental knowledge or carefully designed task-specific prompts, making them struggle with dynamic scene changes or unexpected task conditions, e.g., a robot attempting to put a carrot in the microwave but finds the door was closed. Such challenges underscore two critical issues: adaptability and efficiency. To address them, in this work, we propose an adaptive multi-agent planning framework, termed REMAC, that enables efficient, scene-agnostic multi-robot long-horizon task planning and execution through continuous reflection and self-evolution. REMAC incorporates two key modules: a self-reflection module performing pre-condition and post-condition checks in the loop to evaluate progress and refine plans, and a self-evolvement module dynamically adapting plans based on scene-specific reasoning. It offers several appealing benefits: 1) Robots can initially explore and reason about the environment without complex prompt design. 2) Robots can keep reflecting on potential planning errors and adapting the plan based on task-specific insights. 3) After iterations, a robot can call another one to coordinate tasks in parallel, maximizing the task execution efficiency. To validate REMAC's effectiveness, we build a multi-agent environment for long-horizon robot manipulation and navigation based on RoboCasa, featuring 4 task categories with 27 task styles and 50+ different objects. Based on it, we further benchmark state-of-the-art reasoning models, including DeepSeek-R1, o3-mini, QwQ, and Grok3, demonstrating REMAC's superiority by boosting average success rates by 40% and execution efficiency by 52.7% over the single robot baseline.
Residual Policy Gradient: A Reward View of KL-regularized Objective
Mar 14, 2025



Reinforcement Learning and Imitation Learning have achieved widespread success in many domains but remain constrained during real-world deployment. One of the main issues is the additional requirements that were not considered during training. To address this challenge, policy customization has been introduced, aiming to adapt a prior policy while preserving its inherent properties and meeting new task-specific requirements. A principled approach to policy customization is Residual Q-Learning (RQL), which formulates the problem as a Markov Decision Process (MDP) and derives a family of value-based learning algorithms. However, RQL has not yet been applied to policy gradient methods, which restricts its applicability, especially in tasks where policy gradient has already proven more effective. In this work, we first derive a concise form of Soft Policy Gradient as a preliminary. Building on this, we introduce Residual Policy Gradient (RPG), which extends RQL to policy gradient methods, allowing policy customization in gradient-based RL settings. With the view of RPG, we rethink the KL-regularized objective widely used in RL fine-tuning. We show that under certain assumptions, KL-regularized objective leads to a maximum-entropy policy that balances the inherent properties and task-specific requirements on a reward-level. Our experiments in MuJoCo demonstrate the effectiveness of Soft Policy Gradient and Residual Policy Gradient.
Prismatic-Bending Transformable (PBT) Joint for a Modular, Foldable Manipulator with Enhanced Reachability and Dexterity
Mar 07, 2025



Robotic manipulators, traditionally designed with classical joint-link articulated structures, excel in industrial applications but face challenges in human-centered and general-purpose tasks requiring greater dexterity and adaptability. Addressing these limitations, we introduce the Prismatic-Bending Transformable (PBT) Joint, a novel design inspired by the scissors mechanism, enabling transformable kinematic chains. Each PBT joint module provides three degrees of freedom-bending, rotation, and elongation/contraction-allowing scalable and reconfigurable assemblies to form diverse kinematic configurations tailored to specific tasks. This innovative design surpasses conventional systems, delivering superior flexibility and performance across various applications. We present the design, modeling, and experimental validation of the PBT joint, demonstrating its integration into modular and foldable robotic arms. The PBT joint functions as a single SKU, enabling manipulators to be constructed entirely from standardized PBT joints without additional customized components. It also serves as a modular extension for existing systems, such as wrist modules, streamlining design, deployment, transportation, and maintenance. Three sizes-large, medium, and small-have been developed and integrated into robotic manipulators, highlighting their enhanced dexterity, reachability, and adaptability for manipulation tasks. This work represents a significant advancement in robotic design, offering scalable and efficient solutions for dynamic and unstructured environments.
Fair Play in the Fast Lane: Integrating Sportsmanship into Autonomous Racing Systems
Mar 04, 2025Autonomous racing has gained significant attention as a platform for high-speed decision-making and motion control. While existing methods primarily focus on trajectory planning and overtaking strategies, the role of sportsmanship in ensuring fair competition remains largely unexplored. In human racing, rules such as the one-motion rule and the enough-space rule prevent dangerous and unsportsmanlike behavior. However, autonomous racing systems often lack mechanisms to enforce these principles, potentially leading to unsafe maneuvers. This paper introduces a bi-level game-theoretic framework to integrate sportsmanship (SPS) into versus racing. At the high level, we model racing intentions using a Stackelberg game, where Monte Carlo Tree Search (MCTS) is employed to derive optimal strategies. At the low level, vehicle interactions are formulated as a Generalized Nash Equilibrium Problem (GNEP), ensuring that all agents follow sportsmanship constraints while optimizing their trajectories. Simulation results demonstrate the effectiveness of the proposed approach in enforcing sportsmanship rules while maintaining competitive performance. We analyze different scenarios where attackers and defenders adhere to or disregard sportsmanship rules and show how knowledge of these constraints influences strategic decision-making. This work highlights the importance of balancing competition and fairness in autonomous racing and provides a foundation for developing ethical and safe AI-driven racing systems.
Few-shot Sim2Real Based on High Fidelity Rendering with Force Feedback Teleoperation
Mar 03, 2025Teleoperation offers a promising approach to robotic data collection and human-robot interaction. However, existing teleoperation methods for data collection are still limited by efficiency constraints in time and space, and the pipeline for simulation-based data collection remains unclear. The problem is how to enhance task performance while minimizing reliance on real-world data. To address this challenge, we propose a teleoperation pipeline for collecting robotic manipulation data in simulation and training a few-shot sim-to-real visual-motor policy. Force feedback devices are integrated into the teleoperation system to provide precise end-effector gripping force feedback. Experiments across various manipulation tasks demonstrate that force feedback significantly improves both success rates and execution efficiency, particularly in simulation. Furthermore, experiments with different levels of visual rendering quality reveal that enhanced visual realism in simulation substantially boosts task performance while reducing the need for real-world data.
Physics-Aware Robotic Palletization with Online Masking Inference
Feb 19, 2025The efficient planning of stacking boxes, especially in the online setting where the sequence of item arrivals is unpredictable, remains a critical challenge in modern warehouse and logistics management. Existing solutions often address box size variations, but overlook their intrinsic and physical properties, such as density and rigidity, which are crucial for real-world applications. We use reinforcement learning (RL) to solve this problem by employing action space masking to direct the RL policy toward valid actions. Unlike previous methods that rely on heuristic stability assessments which are difficult to assess in physical scenarios, our framework utilizes online learning to dynamically train the action space mask, eliminating the need for manual heuristic design. Extensive experiments demonstrate that our proposed method outperforms existing state-of-the-arts. Furthermore, we deploy our learned task planner in a real-world robotic palletizer, validating its practical applicability in operational settings.
Dobi-SVD: Differentiable SVD for LLM Compression and Some New Perspectives
Feb 04, 2025



We provide a new LLM-compression solution via SVD, unlocking new possibilities for LLM compression beyond quantization and pruning. We point out that the optimal use of SVD lies in truncating activations, rather than merely using activations as an optimization distance. Building on this principle, we address three critical challenges in SVD-based LLM compression: including (1) How can we determine the optimal activation truncation position for each weight matrix in LLMs? (2) How can we efficiently reconstruct the weight matrices based on truncated activations? (3) How can we address the inherent "injection" nature that results in the information loss of the SVD? We propose Dobi-SVD, which establishes a new, principled approach to SVD-based LLM compression.
FDPP: Fine-tune Diffusion Policy with Human Preference
Jan 14, 2025



Imitation learning from human demonstrations enables robots to perform complex manipulation tasks and has recently witnessed huge success. However, these techniques often struggle to adapt behavior to new preferences or changes in the environment. To address these limitations, we propose Fine-tuning Diffusion Policy with Human Preference (FDPP). FDPP learns a reward function through preference-based learning. This reward is then used to fine-tune the pre-trained policy with reinforcement learning (RL), resulting in alignment of pre-trained policy with new human preferences while still solving the original task. Our experiments across various robotic tasks and preferences demonstrate that FDPP effectively customizes policy behavior without compromising performance. Additionally, we show that incorporating Kullback-Leibler (KL) regularization during fine-tuning prevents over-fitting and helps maintain the competencies of the initial policy.
Testing Human-Hand Segmentation on In-Distribution and Out-of-Distribution Data in Human-Robot Interactions Using a Deep Ensemble Model
Jan 13, 2025



Reliable detection and segmentation of human hands are critical for enhancing safety and facilitating advanced interactions in human-robot collaboration. Current research predominantly evaluates hand segmentation under in-distribution (ID) data, which reflects the training data of deep learning (DL) models. However, this approach fails to address out-of-distribution (OOD) scenarios that often arise in real-world human-robot interactions. In this study, we present a novel approach by evaluating the performance of pre-trained DL models under both ID data and more challenging OOD scenarios. To mimic realistic industrial scenarios, we designed a diverse dataset featuring simple and cluttered backgrounds with industrial tools, varying numbers of hands (0 to 4), and hands with and without gloves. For OOD scenarios, we incorporated unique and rare conditions such as finger-crossing gestures and motion blur from fast-moving hands, addressing both epistemic and aleatoric uncertainties. To ensure multiple point of views (PoVs), we utilized both egocentric cameras, mounted on the operator's head, and static cameras to capture RGB images of human-robot interactions. This approach allowed us to account for multiple camera perspectives while also evaluating the performance of models trained on existing egocentric datasets as well as static-camera datasets. For segmentation, we used a deep ensemble model composed of UNet and RefineNet as base learners. Performance evaluation was conducted using segmentation metrics and uncertainty quantification via predictive entropy. Results revealed that models trained on industrial datasets outperformed those trained on non-industrial datasets, highlighting the importance of context-specific training. Although all models struggled with OOD scenarios, those trained on industrial datasets demonstrated significantly better generalization.