 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Guidelines for Nonlinear Kalman Filters via Covariance Compensation
Mar 24, 2026Nonlinear extensions of the Kalman filter (KF), such as the extended Kalman filter (EKF) and the unscented Kalman filter (UKF), are indispensable for state estimation in complex dynamical systems, yet the conditions for a nonlinear KF to provide robust and accurate estimations remain poorly understood. This work proposes a theoretical framework that identifies the causes of failure and success in certain nonlinear KFs and establishes guidelines for their improvement. Central to our framework is the concept of covariance compensation: the deviation between the covariance predicted by a nonlinear KF and that of the EKF. With this definition and detailed theoretical analysis, we derive three design guidelines for nonlinear KFs: (i) invariance under orthogonal transformations, (ii) sufficient covariance compensation beyond the EKF baseline, and (iii) selection of compensation magnitude that favors underconfidence. Both theoretical analysis and empirical validation confirm that adherence to these principles significantly improves estimation accuracy, whereas fixed parameter choices commonly adopted in the literature are often suboptimal. The codes and the proofs for all the theorems in this paper are available at https://github.com/Shida-Jiang/Guidelines-for-Nonlinear-Kalman-Filters.
Energy-Aware Lane Planning for Connected Electric Vehicles in Urban Traffic: Design and Vehicle-in-the-Loop Validation
Mar 29, 2025Urban driving with connected and automated vehicles (CAVs) offers potential for energy savings, yet most eco-driving strategies focus solely on longitudinal speed control within a single lane. This neglects the significant impact of lateral decisions, such as lane changes, on overall energy efficiency, especially in environments with traffic signals and heterogeneous traffic flow. To address this gap, we propose a novel energy-aware motion planning framework that jointly optimizes longitudinal speed and lateral lane-change decisions using vehicle-to-infrastructure (V2I) communication. Our approach estimates long-term energy costs using a graph-based approximation and solves short-horizon optimal control problems under traffic constraints. Using a data-driven energy model calibrated to an actual battery electric vehicle, we demonstrate with vehicle-in-the-loop experiments that our method reduces motion energy consumption by up to 24 percent compared to a human driver, highlighting the potential of connectivity-enabled planning for sustainable urban autonomy.
Physics-Aware Robotic Palletization with Online Masking Inference
Feb 19, 2025The efficient planning of stacking boxes, especially in the online setting where the sequence of item arrivals is unpredictable, remains a critical challenge in modern warehouse and logistics management. Existing solutions often address box size variations, but overlook their intrinsic and physical properties, such as density and rigidity, which are crucial for real-world applications. We use reinforcement learning (RL) to solve this problem by employing action space masking to direct the RL policy toward valid actions. Unlike previous methods that rely on heuristic stability assessments which are difficult to assess in physical scenarios, our framework utilizes online learning to dynamically train the action space mask, eliminating the need for manual heuristic design. Extensive experiments demonstrate that our proposed method outperforms existing state-of-the-arts. Furthermore, we deploy our learned task planner in a real-world robotic palletizer, validating its practical applicability in operational settings.
A New Framework for Nonlinear Kalman Filters
Jul 08, 2024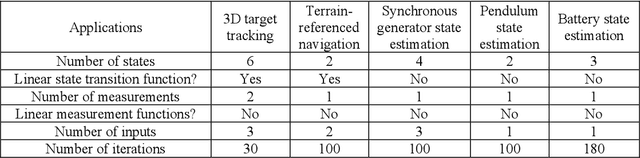
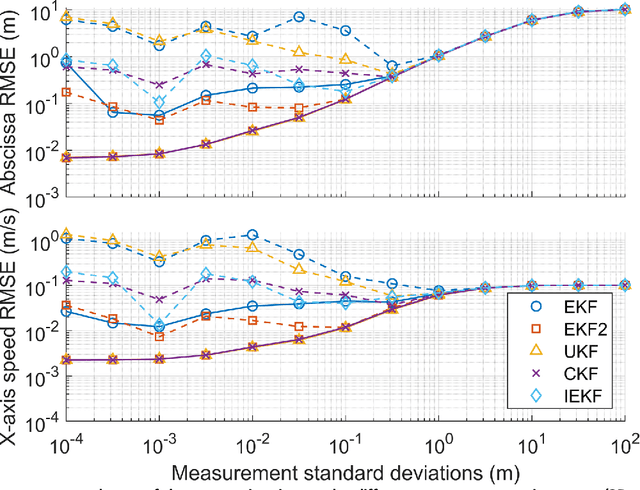
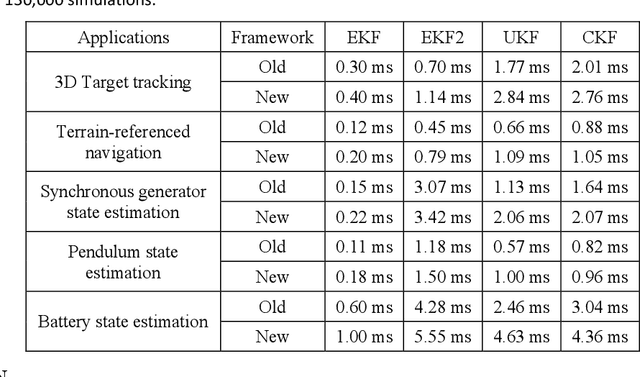

The Kalman filter (KF) is a state estimation algorithm that optimally combines system knowledge and measurements to minimize the mean squared error of the estimated states. While KF was initially designed for linear systems, numerous extensions of it, such as extended Kalman filter (EKF), unscented Kalman filter (UKF), cubature Kalman filter (CKF), etc., have been proposed for nonlinear systems. Although different types of nonlinear KFs have different pros and cons, they all use the same framework of linear KF, which, according to what we found in this paper, tends to give overconfident and less accurate state estimations when the measurement functions are nonlinear. Therefore, in this study, we designed a new framework for nonlinear KFs and showed theoretically and empirically that the new framework estimates the states and covariance matrix more accurately than the old one. The new framework was tested on four different nonlinear KFs and five different tasks, showcasing its ability to reduce the estimation errors by several orders of magnitude in low-measurement-noise conditions, with only about a 10 to 90% increase in computational time. All types of nonlinear KFs can benefit from the new framework, and the benefit will increase as the sensors become more and more accurate in the future. As an example, EKF, the simplest nonlinear KF that was previously believed to work poorly for strongly nonlinear systems, can now provide fast and fairly accurate state estimations with the help of the new framework. The codes are available at https://github.com/Shida-Jiang/A-new-framework-for-nonlinear-Kalman-filters.
HumanLight: Incentivizing Ridesharing via Human-centric Deep Reinforcement Learning in Traffic Signal Control
Apr 05, 2023Single occupancy vehicles are the most attractive transportation alternative for many commuters, leading to increased traffic congestion and air pollution. Advancements in information technologies create opportunities for smart solutions that incentivize ridesharing and mode shift to higher occupancy vehicles (HOVs) to achieve the car lighter vision of cities. In this study, we present HumanLight, a novel decentralized adaptive traffic signal control algorithm designed to optimize people throughput at intersections. Our proposed controller is founded on reinforcement learning with the reward function embedding the transportation-inspired concept of pressure at the person-level. By rewarding HOV commuters with travel time savings for their efforts to merge into a single ride, HumanLight achieves equitable allocation of green times. Apart from adopting FRAP, a state-of-the-art (SOTA) base model, HumanLight introduces the concept of active vehicles, loosely defined as vehicles in proximity to the intersection within the action interval window. The proposed algorithm showcases significant headroom and scalability in different network configurations considering multimodal vehicle splits at various scenarios of HOV adoption. Improvements in person delays and queues range from 15% to over 55% compared to vehicle-level SOTA controllers. We quantify the impact of incorporating active vehicles in the formulation of our RL model for different network structures. HumanLight also enables regulation of the aggressiveness of the HOV prioritization. The impact of parameter setting on the generated phase profile is investigated as a key component of acyclic signal controllers affecting pedestrian waiting times. HumanLight's scalable, decentralized design can reshape the resolution of traffic management to be more human-centric and empower policies that incentivize ridesharing and public transit systems.
Integrating Physics-Based Modeling with Machine Learning for Lithium-Ion Batteries
Dec 24, 2021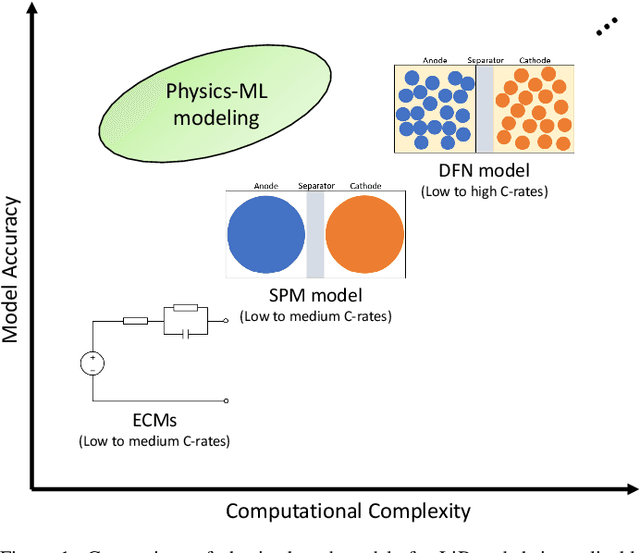
Mathematical modeling of lithium-ion batteries (LiBs) is a primary challenge in advanced battery management. This paper proposes two new frameworks to integrate a physics-based model with machine learning to achieve high-precision modeling for LiBs. The frameworks are characterized by informing the machine learning model of the state information of the physical model, enabling a deep integration between physics and machine learning. Based on the frameworks, a series of hybrid models are constructed, through combining an electrochemical model and an equivalent circuit model, respectively, with a feedforward neural network. The hybrid models are relatively parsimonious in structure and can provide considerable predictive accuracy under a broad range of C-rates, as shown by extensive simulations and experiments. The study further expands to conduct aging-aware hybrid modeling, leading to the design of a hybrid model conscious of the state-of-health to make prediction. Experiments show that the model has high predictive accuracy throughout a LiB's cycle life.
Integrating Electrochemical Modeling with Machine Learning for Lithium-Ion Batteries
Apr 15, 2021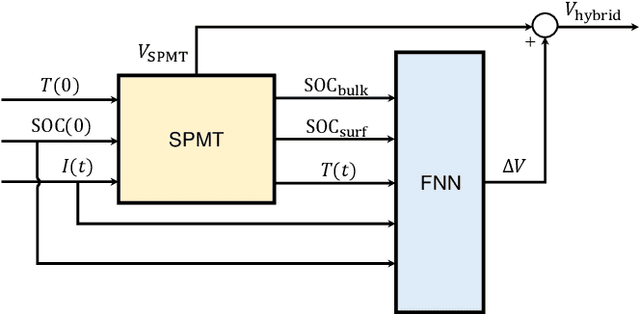
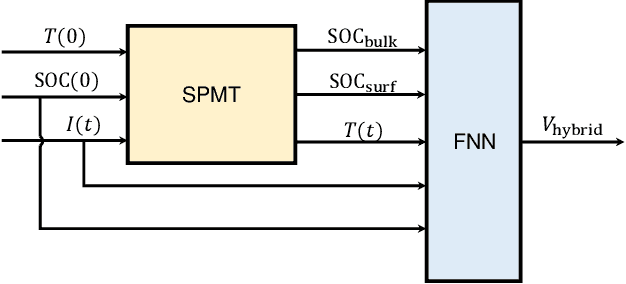
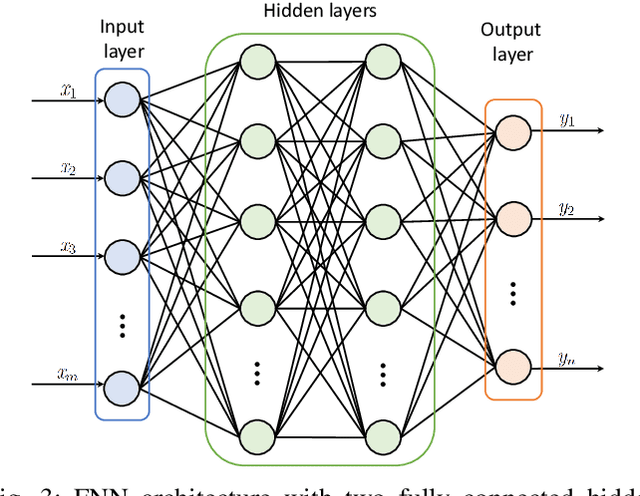
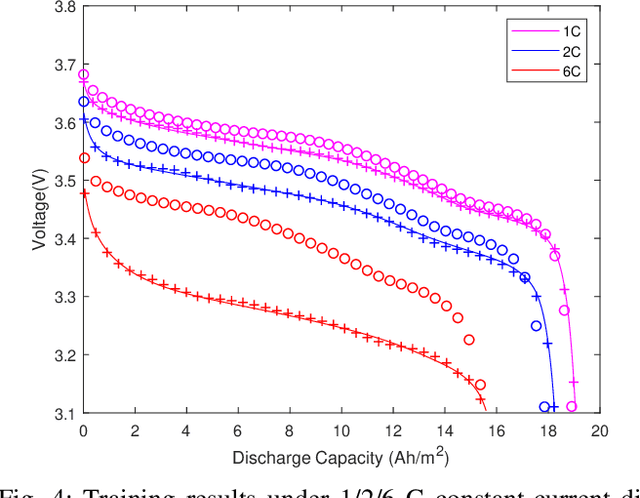
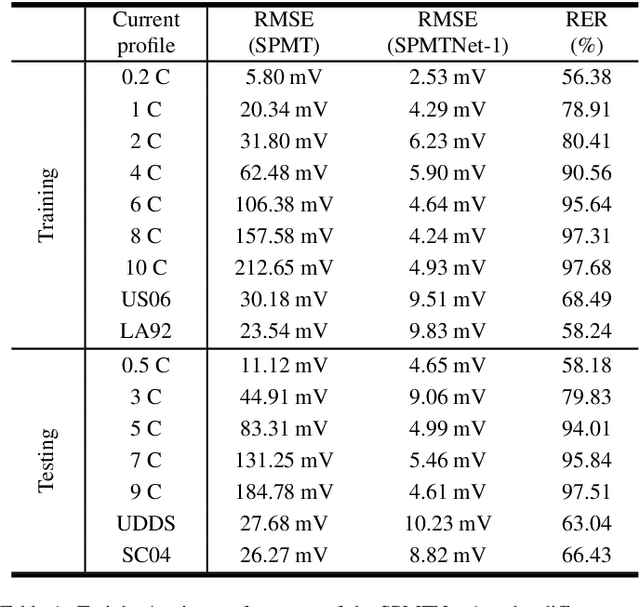
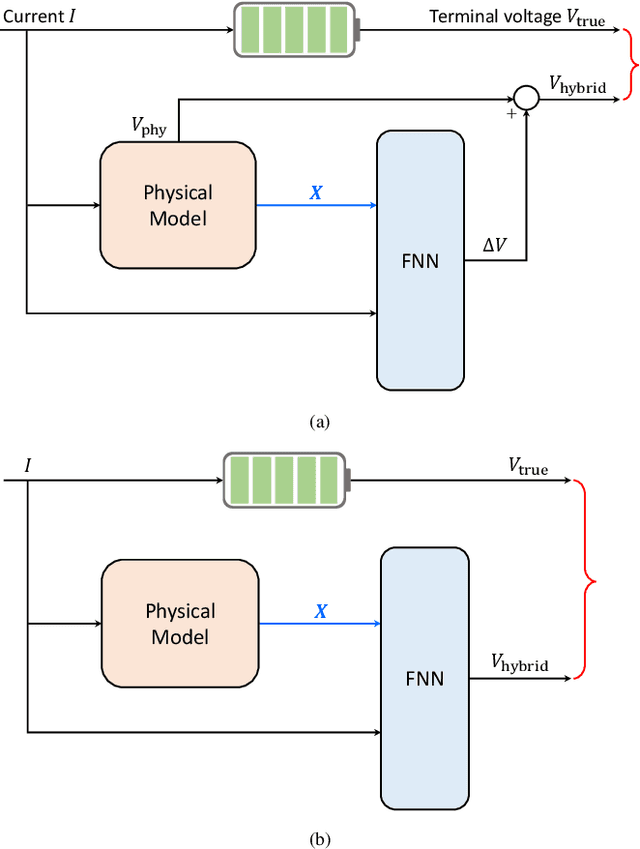
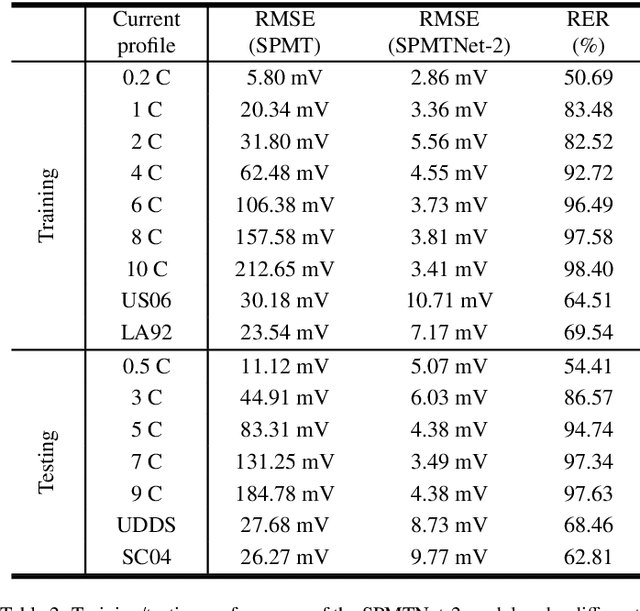
Mathematical modeling of lithium-ion batteries (LiBs) is a central challenge in advanced battery management. This paper presents a new approach to integrate a physics-based model with machine learning to achieve high-precision modeling for LiBs. This approach uniquely proposes to inform the machine learning model of the dynamic state of the physical model, enabling a deep integration between physics and machine learning. We propose two hybrid physics-machine learning models based on the approach, which blend a single particle model with thermal dynamics (SPMT) with a feedforward neural network (FNN) to perform physics-informed learning of a LiB's dynamic behavior. The proposed models are relatively parsimonious in structure and can provide considerable predictive accuracy even at high C-rates, as shown by extensive simulations.
Cooperation-Aware Lane Change Maneuver in Dense Traffic based on Model Predictive Control with Recurrent Neural Network
Sep 29, 2019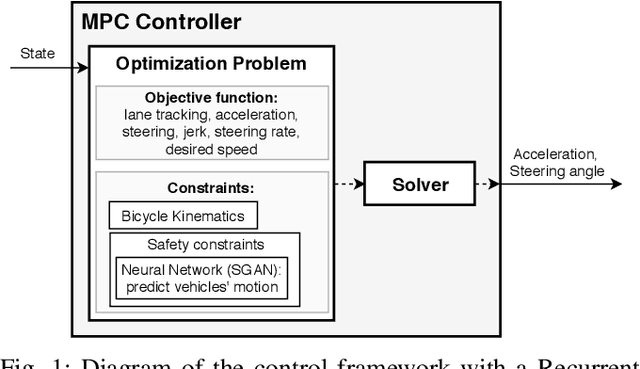
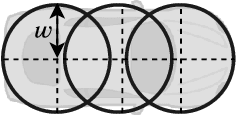
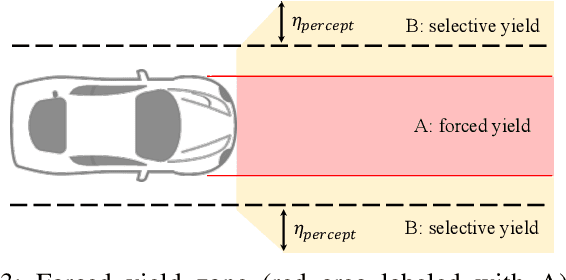
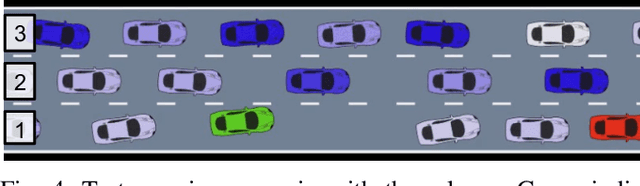
This paper presents a real-time lane change control framework of autonomous driving in dense traffic, which exploits cooperative behaviors of other drivers. This paper focuses on heavy traffic where vehicles cannot change lanes without cooperating with other drivers. In this case, classical robust controls may not apply since there is no safe area to merge to without interacting with the other drivers. That said, modeling complex and interactive human behaviors is highly non-trivial from the perspective of control engineers. We propose a mathematical control framework based on Model Predictive Control (MPC) encompassing a state-of-the-art Recurrent Neural network (RNN) architecture. In particular, RNN predicts interactive motions of other drivers in response to potential actions of the autonomous vehicle, which are then systematically evaluated in safety constraints. We also propose a real-time heuristic algorithm to find locally optimal control inputs. Finally, quantitative and qualitative analysis on simulation studies are presented to illustrate the benefits of the proposed framework.