 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHorizonWeaver: Generalizable Multi-Level Semantic Editing for Driving Scenes
Apr 06, 2026Ensuring safety in autonomous driving requires scalable generation of realistic, controllable driving scenes beyond what real-world testing provides. Yet existing instruction guided image editors, trained on object-centric or artistic data, struggle with dense, safety-critical driving layouts. We propose HorizonWeaver, which tackles three fundamental challenges in driving scene editing: (1) multi-level granularity, requiring coherent object- and scene-level edits in dense environments; (2) rich high-level semantics, preserving diverse objects while following detailed instructions; and (3) ubiquitous domain shifts, handling changes in climate, layout, and traffic across unseen environments. The core of HorizonWeaver is a set of complementary contributions across data, model, and training: (1) Data: Large-scale dataset generation, where we build a paired real/synthetic dataset from Boreas, nuScenes, and Argoverse2 to improve generalization; (2) Model: Language-Guided Masks for fine-grained editing, where semantics-enriched masks and prompts enable precise, language-guided edits; and (3) Training: Content preservation and instruction alignment, where joint losses enforce scene consistency and instruction fidelity. Together, HorizonWeaver provides a scalable framework for photorealistic, instruction-driven editing of complex driving scenes, collecting 255K images across 13 editing categories and outperforming prior methods in L1, CLIP, and DINO metrics, achieving +46.4% user preference and improving BEV segmentation IoU by +33%. Project page: https://msoroco.github.io/horizonweaver/
RAD-LAD: Rule and Language Grounded Autonomous Driving in Real-Time
Mar 31, 2026We present LAD, a real-time language--action planner with an interruptible architecture that produces a motion plan in a single forward pass (~20 Hz) or generates textual reasoning alongside a motion plan (~10 Hz). LAD is fast enough for real-time closed-loop deployment, achieving ~3x lower latency than prior driving language models while setting a new learning-based state of the art on nuPlan Test14-Hard and InterPlan. We also introduce RAD, a rule-based planner designed to address structural limitations of PDM-Closed. RAD achieves state-of-the-art performance among rule-based planners on nuPlan Test14-Hard and InterPlan. Finally, we show that combining RAD and LAD enables hybrid planning that captures the strengths of both approaches. This hybrid system demonstrates that rules and learning provide complementary capabilities: rules support reliable maneuvering, while language enables adaptive and explainable decision-making.
HorizonForge: Driving Scene Editing with Any Trajectories and Any Vehicles
Feb 24, 2026Controllable driving scene generation is critical for realistic and scalable autonomous driving simulation, yet existing approaches struggle to jointly achieve photorealism and precise control. We introduce HorizonForge, a unified framework that reconstructs scenes as editable Gaussian Splats and Meshes, enabling fine-grained 3D manipulation and language-driven vehicle insertion. Edits are rendered through a noise-aware video diffusion process that enforces spatial and temporal consistency, producing diverse scene variations in a single feed-forward pass without per-trajectory optimization. To standardize evaluation, we further propose HorizonSuite, a comprehensive benchmark spanning ego- and agent-level editing tasks such as trajectory modifications and object manipulation. Extensive experiments show that Gaussian-Mesh representation delivers substantially higher fidelity than alternative 3D representations, and that temporal priors from video diffusion are essential for coherent synthesis. Combining these findings, HorizonForge establishes a simple yet powerful paradigm for photorealistic, controllable driving simulation, achieving an 83.4% user-preference gain and a 25.19% FID improvement over the second best state-of-the-art method. Project page: https://horizonforge.github.io/ .
LangDriveCTRL: Natural Language Controllable Driving Scene Editing with Multi-modal Agents
Dec 19, 2025
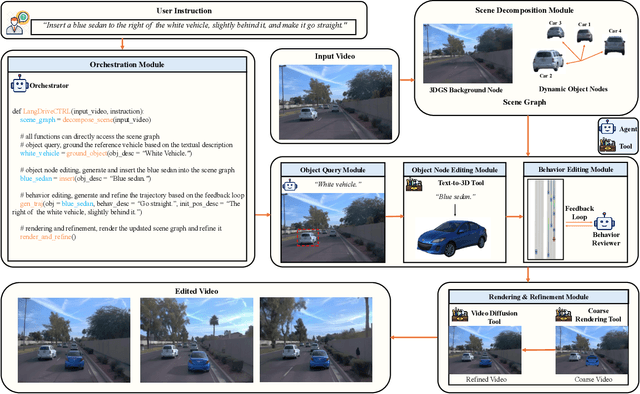
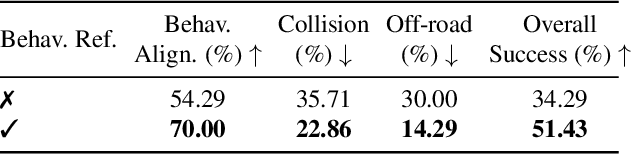
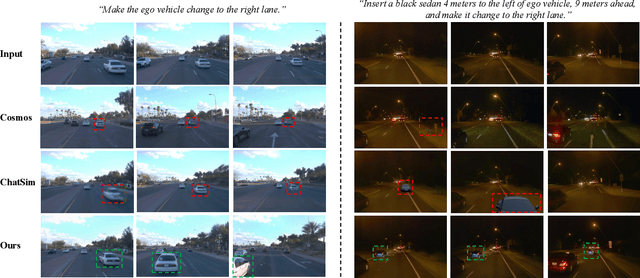
LangDriveCTRL is a natural-language-controllable framework for editing real-world driving videos to synthesize diverse traffic scenarios. It leverages explicit 3D scene decomposition to represent driving videos as a scene graph, containing static background and dynamic objects. To enable fine-grained editing and realism, it incorporates an agentic pipeline in which an Orchestrator transforms user instructions into execution graphs that coordinate specialized agents and tools. Specifically, an Object Grounding Agent establishes correspondence between free-form text descriptions and target object nodes in the scene graph; a Behavior Editing Agent generates multi-object trajectories from language instructions; and a Behavior Reviewer Agent iteratively reviews and refines the generated trajectories. The edited scene graph is rendered and then refined using a video diffusion tool to address artifacts introduced by object insertion and significant view changes. LangDriveCTRL supports both object node editing (removal, insertion and replacement) and multi-object behavior editing from a single natural-language instruction. Quantitatively, it achieves nearly $2\times$ higher instruction alignment than the previous SoTA, with superior structural preservation, photorealism, and traffic realism. Project page is available at: https://yunhe24.github.io/langdrivectrl/.
LANGTRAJ: Diffusion Model and Dataset for Language-Conditioned Trajectory Simulation
Apr 15, 2025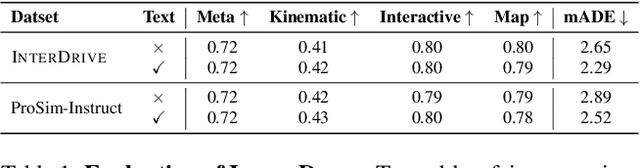
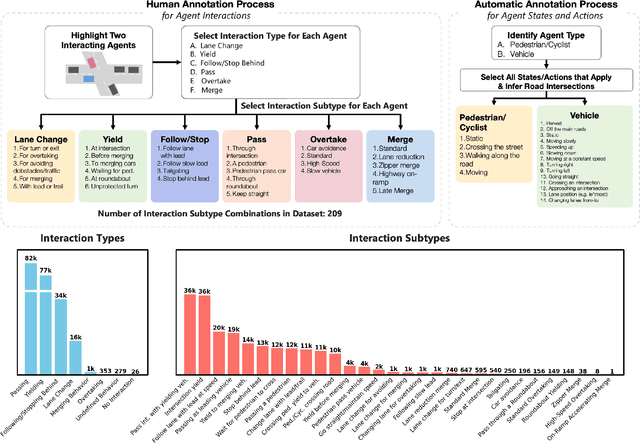
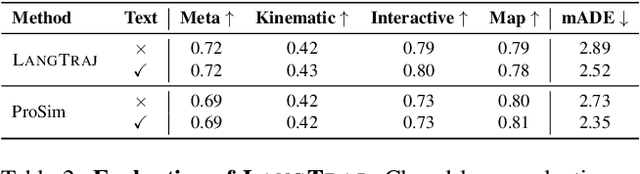
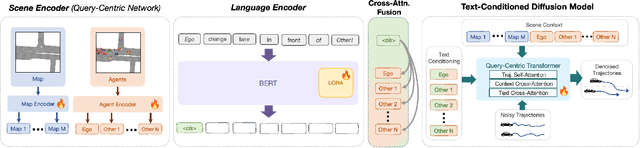
Evaluating autonomous vehicles with controllability enables scalable testing in counterfactual or structured settings, enhancing both efficiency and safety. We introduce LangTraj, a language-conditioned scene-diffusion model that simulates the joint behavior of all agents in traffic scenarios. By conditioning on natural language inputs, LangTraj provides flexible and intuitive control over interactive behaviors, generating nuanced and realistic scenarios. Unlike prior approaches that depend on domain-specific guidance functions, LangTraj incorporates language conditioning during training, facilitating more intuitive traffic simulation control. We propose a novel closed-loop training strategy for diffusion models, explicitly tailored to enhance stability and realism during closed-loop simulation. To support language-conditioned simulation, we develop Inter-Drive, a large-scale dataset with diverse and interactive labels for training language-conditioned diffusion models. Our dataset is built upon a scalable pipeline for annotating agent-agent interactions and single-agent behaviors, ensuring rich and varied supervision. Validated on the Waymo Motion Dataset, LangTraj demonstrates strong performance in realism, language controllability, and language-conditioned safety-critical simulation, establishing a new paradigm for flexible and scalable autonomous vehicle testing.
Controllable Safety-Critical Closed-loop Traffic Simulation via Guided Diffusion
Dec 31, 2023Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail traffic scenarios. Traditional methods for generating safety-critical scenarios often fall short in realism and controllability. Furthermore, these techniques generally neglect the dynamics of agent interactions. To mitigate these limitations, we introduce a novel closed-loop simulation framework rooted in guided diffusion models. Our approach yields two distinct advantages: 1) the generation of realistic long-tail scenarios that closely emulate real-world conditions, and 2) enhanced controllability, enabling more comprehensive and interactive evaluations. We achieve this through novel guidance objectives that enhance road progress while lowering collision and off-road rates. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process, which allows the adversarial agent to challenge a planner with plausible maneuvers, while all agents in the scene exhibit reactive and realistic behaviors. We validate our framework empirically using the NuScenes dataset, demonstrating improvements in both realism and controllability. These findings affirm that guided diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader landscape of autonomous driving. For additional resources and demonstrations, visit our project page at https://safe-sim.github.io.
LLM-Assist: Enhancing Closed-Loop Planning with Language-Based Reasoning
Dec 30, 2023Although planning is a crucial component of the autonomous driving stack, researchers have yet to develop robust planning algorithms that are capable of safely handling the diverse range of possible driving scenarios. Learning-based planners suffer from overfitting and poor long-tail performance. On the other hand, rule-based planners generalize well, but might fail to handle scenarios that require complex driving maneuvers. To address these limitations, we investigate the possibility of leveraging the common-sense reasoning capabilities of Large Language Models (LLMs) such as GPT4 and Llama2 to generate plans for self-driving vehicles. In particular, we develop a novel hybrid planner that leverages a conventional rule-based planner in conjunction with an LLM-based planner. Guided by commonsense reasoning abilities of LLMs, our approach navigates complex scenarios which existing planners struggle with, produces well-reasoned outputs while also remaining grounded through working alongside the rule-based approach. Through extensive evaluation on the nuPlan benchmark, we achieve state-of-the-art performance, outperforming all existing pure learning- and rule-based methods across most metrics. Our code will be available at https://llmassist.github.io.
OpEnCam: Lensless Optical Encryption Camera
Dec 02, 2023Lensless cameras multiplex the incoming light before it is recorded by the sensor. This ability to multiplex the incoming light has led to the development of ultra-thin, high-speed, and single-shot 3D imagers. Recently, there have been various attempts at demonstrating another useful aspect of lensless cameras - their ability to preserve the privacy of a scene by capturing encrypted measurements. However, existing lensless camera designs suffer numerous inherent privacy vulnerabilities. To demonstrate this, we develop the first comprehensive attack model for encryption cameras, and propose OpEnCam -- a novel lensless OPtical ENcryption CAmera design that overcomes these vulnerabilities. OpEnCam encrypts the incoming light before capturing it using the modulating ability of optical masks. Recovery of the original scene from an OpEnCam measurement is possible only if one has access to the camera's encryption key, defined by the unique optical elements of each camera. Our OpEnCam design introduces two major improvements over existing lensless camera designs - (a) the use of two co-axially located optical masks, one stuck to the sensor and the other a few millimeters above the sensor and (b) the design of mask patterns, which are derived heuristically from signal processing ideas. We show, through experiments, that OpEnCam is robust against a range of attack types while still maintaining the imaging capabilities of existing lensless cameras. We validate the efficacy of OpEnCam using simulated and real data. Finally, we built and tested a prototype in the lab for proof-of-concept.
DP-Mix: Mixup-based Data Augmentation for Differentially Private Learning
Nov 02, 2023



Data augmentation techniques, such as simple image transformations and combinations, are highly effective at improving the generalization of computer vision models, especially when training data is limited. However, such techniques are fundamentally incompatible with differentially private learning approaches, due to the latter's built-in assumption that each training image's contribution to the learned model is bounded. In this paper, we investigate why naive applications of multi-sample data augmentation techniques, such as mixup, fail to achieve good performance and propose two novel data augmentation techniques specifically designed for the constraints of differentially private learning. Our first technique, DP-Mix_Self, achieves SoTA classification performance across a range of datasets and settings by performing mixup on self-augmented data. Our second technique, DP-Mix_Diff, further improves performance by incorporating synthetic data from a pre-trained diffusion model into the mixup process. We open-source the code at https://github.com/wenxuan-Bao/DP-Mix.
LDP-Feat: Image Features with Local Differential Privacy
Aug 22, 2023Modern computer vision services often require users to share raw feature descriptors with an untrusted server. This presents an inherent privacy risk, as raw descriptors may be used to recover the source images from which they were extracted. To address this issue, researchers recently proposed privatizing image features by embedding them within an affine subspace containing the original feature as well as adversarial feature samples. In this paper, we propose two novel inversion attacks to show that it is possible to (approximately) recover the original image features from these embeddings, allowing us to recover privacy-critical image content. In light of such successes and the lack of theoretical privacy guarantees afforded by existing visual privacy methods, we further propose the first method to privatize image features via local differential privacy, which, unlike prior approaches, provides a guaranteed bound for privacy leakage regardless of the strength of the attacks. In addition, our method yields strong performance in visual localization as a downstream task while enjoying the privacy guarantee.