 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOBALT: Crowdsourcing Robot Learning via Cloud-Based Teleoperation with Smartphones
May 20, 2026The scarcity of large-scale, high-quality demonstration data remains a bottleneck in scaling imitation learning for robotic manipulation. We present COBALT, a teleoperation platform designed to democratize robot learning at scale both in simulation and in the real world. By leveraging vectorized environments, our scalable, load-balanced infrastructure supports concurrent teleoperation by multiple users on a single GPU, yielding a significant reduction in teleoperation cost. Operators can connect from nearly anywhere on Earth using commonly available devices, including single or dual smartphones, VR headsets, 3D mice, and keyboards. An inmemory data cache and efficient video streaming keep control and rendering synchronous, sustaining dozens of concurrent users at 20 Hz with sub-100 ms end-to-end latency for up to 8 concurrent users per GPU. We also demonstrate stable operation supporting 256 simulated clients across 8 GPUs, underscoring the system's ability to scale across hardware and within individual servers. We perform a comprehensive user study showing that phone-based teleoperation performs comparably to or better than specialized hardware, enabling faster, more ergonomic data collection. To ensure data quality, COBALT logs a suite of real-time metrics to automatically filter suboptimal demonstrations. We further demonstrate that a structured user training curriculum significantly improves data collection quality. Guided by insights from our user study, we crowdsource the collection of a large-scale, high-quality pilot dataset with 7500+ demonstrations (50+ hours) collected with smartphones across nine countries over five days. We validate the dataset's quality by training state-of-the-art imitation learning algorithms. Please visit https://cobalt-teleop.github.io/ for more details.
SoftMimicGen: A Data Generation System for Scalable Robot Learning in Deformable Object Manipulation
Mar 26, 2026Large-scale robot datasets have facilitated the learning of a wide range of robot manipulation skills, but these datasets remain difficult to collect and scale further, owing to the intractable amount of human time, effort, and cost required. Simulation and synthetic data generation have proven to be an effective alternative to fuel this need for data, especially with the advent of recent work showing that such synthetic datasets can dramatically reduce real-world data requirements and facilitate generalization to novel scenarios unseen in real-world demonstrations. However, this paradigm has been limited to rigid-body tasks, which are easy to simulate. Deformable object manipulation encompasses a large portion of real-world manipulation and remains a crucial gap to address towards increasing adoption of the synthetic simulation data paradigm. In this paper, we introduce SoftMimicGen, an automated data generation pipeline for deformable object manipulation tasks. We introduce a suite of high-fidelity simulation environments that encompasses a wide range of deformable objects (stuffed animal, rope, tissue, towel) and manipulation behaviors (high-precision threading, dynamic whipping, folding, pick-and-place), across four robot embodiments: a single-arm manipulator, bimanual arms, a humanoid, and a surgical robot. We apply SoftMimicGen to generate datasets across the task suite, train high-performing policies from the data, and systematically analyze the data generation system. Project website: \href{https://softmimicgen.github.io}{softmimicgen.github.io}.
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
SonoGym: High Performance Simulation for Challenging Surgical Tasks with Robotic Ultrasound
Jul 01, 2025Ultrasound (US) is a widely used medical imaging modality due to its real-time capabilities, non-invasive nature, and cost-effectiveness. Robotic ultrasound can further enhance its utility by reducing operator dependence and improving access to complex anatomical regions. For this, while deep reinforcement learning (DRL) and imitation learning (IL) have shown potential for autonomous navigation, their use in complex surgical tasks such as anatomy reconstruction and surgical guidance remains limited -- largely due to the lack of realistic and efficient simulation environments tailored to these tasks. We introduce SonoGym, a scalable simulation platform for complex robotic ultrasound tasks that enables parallel simulation across tens to hundreds of environments. Our framework supports realistic and real-time simulation of US data from CT-derived 3D models of the anatomy through both a physics-based and a generative modeling approach. Sonogym enables the training of DRL and recent IL agents (vision transformers and diffusion policies) for relevant tasks in robotic orthopedic surgery by integrating common robotic platforms and orthopedic end effectors. We further incorporate submodular DRL -- a recent method that handles history-dependent rewards -- for anatomy reconstruction and safe reinforcement learning for surgery. Our results demonstrate successful policy learning across a range of scenarios, while also highlighting the limitations of current methods in clinically relevant environments. We believe our simulation can facilitate research in robot learning approaches for such challenging robotic surgery applications. Dataset, codes, and videos are publicly available at https://sonogym.github.io/.
SuFIA-BC: Generating High Quality Demonstration Data for Visuomotor Policy Learning in Surgical Subtasks
Apr 21, 2025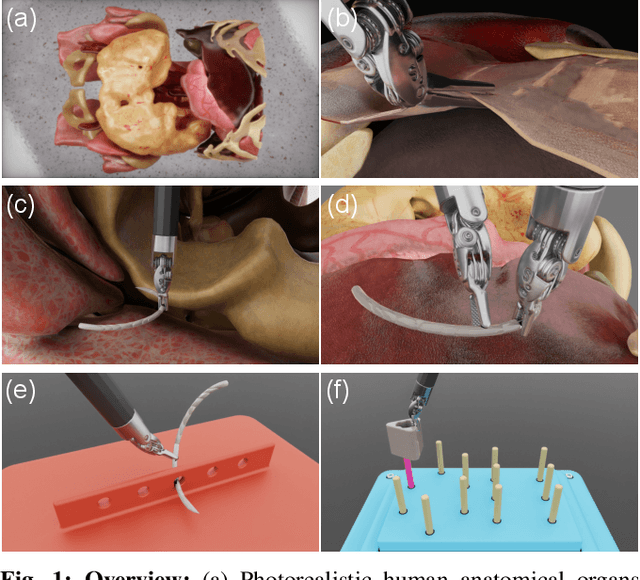
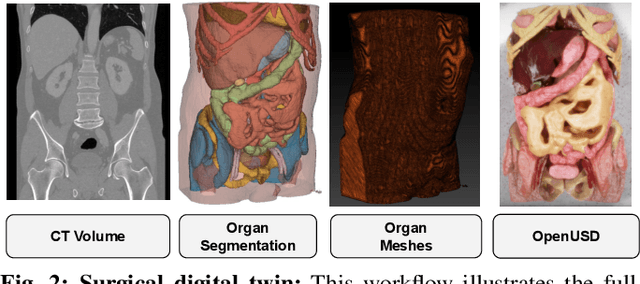
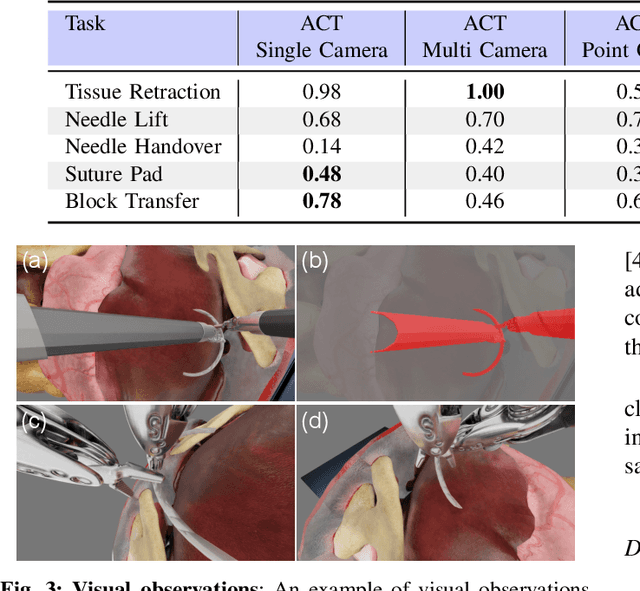

Behavior cloning facilitates the learning of dexterous manipulation skills, yet the complexity of surgical environments, the difficulty and expense of obtaining patient data, and robot calibration errors present unique challenges for surgical robot learning. We provide an enhanced surgical digital twin with photorealistic human anatomical organs, integrated into a comprehensive simulator designed to generate high-quality synthetic data to solve fundamental tasks in surgical autonomy. We present SuFIA-BC: visual Behavior Cloning policies for Surgical First Interactive Autonomy Assistants. We investigate visual observation spaces including multi-view cameras and 3D visual representations extracted from a single endoscopic camera view. Through systematic evaluation, we find that the diverse set of photorealistic surgical tasks introduced in this work enables a comprehensive evaluation of prospective behavior cloning models for the unique challenges posed by surgical environments. We observe that current state-of-the-art behavior cloning techniques struggle to solve the contact-rich and complex tasks evaluated in this work, regardless of their underlying perception or control architectures. These findings highlight the importance of customizing perception pipelines and control architectures, as well as curating larger-scale synthetic datasets that meet the specific demands of surgical tasks. Project website: https://orbit-surgical.github.io/sufia-bc/
Adapt3R: Adaptive 3D Scene Representation for Domain Transfer in Imitation Learning
Mar 06, 2025



Imitation Learning (IL) has been very effective in training robots to perform complex and diverse manipulation tasks. However, its performance declines precipitously when the observations are out of the training distribution. 3D scene representations that incorporate observations from calibrated RGBD cameras have been proposed as a way to improve generalizability of IL policies, but our evaluations in cross-embodiment and novel camera pose settings found that they show only modest improvement. To address those challenges, we propose Adaptive 3D Scene Representation (Adapt3R), a general-purpose 3D observation encoder which uses a novel architecture to synthesize data from one or more RGBD cameras into a single vector that can then be used as conditioning for arbitrary IL algorithms. The key idea is to use a pretrained 2D backbone to extract semantic information about the scene, using 3D only as a medium for localizing this semantic information with respect to the end-effector. We show that when trained end-to-end with several SOTA multi-task IL algorithms, Adapt3R maintains these algorithms' multi-task learning capacity while enabling zero-shot transfer to novel embodiments and camera poses. Furthermore, we provide a detailed suite of ablation and sensitivity experiments to elucidate the design space for point cloud observation encoders.
SuFIA: Language-Guided Augmented Dexterity for Robotic Surgical Assistants
May 08, 2024



In this work, we present SuFIA, the first framework for natural language-guided augmented dexterity for robotic surgical assistants. SuFIA incorporates the strong reasoning capabilities of large language models (LLMs) with perception modules to implement high-level planning and low-level control of a robot for surgical sub-task execution. This enables a learning-free approach to surgical augmented dexterity without any in-context examples or motion primitives. SuFIA uses a human-in-the-loop paradigm by restoring control to the surgeon in the case of insufficient information, mitigating unexpected errors for mission-critical tasks. We evaluate SuFIA on four surgical sub-tasks in a simulation environment and two sub-tasks on a physical surgical robotic platform in the lab, demonstrating its ability to perform common surgical sub-tasks through supervised autonomous operation under challenging physical and workspace conditions. Project website: orbit-surgical.github.io/sufia
ORBIT-Surgical: An Open-Simulation Framework for Learning Surgical Augmented Dexterity
Apr 24, 2024



Physics-based simulations have accelerated progress in robot learning for driving, manipulation, and locomotion. Yet, a fast, accurate, and robust surgical simulation environment remains a challenge. In this paper, we present ORBIT-Surgical, a physics-based surgical robot simulation framework with photorealistic rendering in NVIDIA Omniverse. We provide 14 benchmark surgical tasks for the da Vinci Research Kit (dVRK) and Smart Tissue Autonomous Robot (STAR) which represent common subtasks in surgical training. ORBIT-Surgical leverages GPU parallelization to train reinforcement learning and imitation learning algorithms to facilitate study of robot learning to augment human surgical skills. ORBIT-Surgical also facilitates realistic synthetic data generation for active perception tasks. We demonstrate ORBIT-Surgical sim-to-real transfer of learned policies onto a physical dVRK robot. Project website: orbit-surgical.github.io