 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-H-Embodiment: A Large-Scale Dataset for Enabling Foundation Models in Medical Robotics
Apr 22, 2026Autonomous medical robots hold promise to improve patient outcomes, reduce provider workload, democratize access to care, and enable superhuman precision. However, autonomous medical robotics has been limited by a fundamental data problem: existing medical robotic datasets are small, single-embodiment, and rarely shared openly, restricting the development of foundation models that the field needs to advance. We introduce Open-H-Embodiment, the largest open dataset of medical robotic video with synchronized kinematics to date, spanning more than 49 institutions and multiple robotic platforms including the CMR Versius, Intuitive Surgical's da Vinci, da Vinci Research Kit (dVRK), Rob Surgical BiTrack, Virtual Incision's MIRA, Moon Surgical Maestro, and a variety of custom systems, spanning surgical manipulation, robotic ultrasound, and endoscopy procedures. We demonstrate the research enabled by this dataset through two foundation models. GR00T-H is the first open foundation vision-language-action model for medical robotics, which is the only evaluated model to achieve full end-to-end task completion on a structured suturing benchmark (25% of trials vs. 0% for all others) and achieves 64% average success across a 29-step ex vivo suturing sequence. We also train Cosmos-H-Surgical-Simulator, the first action-conditioned world model to enable multi-embodiment surgical simulation from a single checkpoint, spanning nine robotic platforms and supporting in silico policy evaluation and synthetic data generation for the medical domain. These results suggest that open, large-scale medical robot data collection can serve as critical infrastructure for the research community, enabling advances in robot learning, world modeling, and beyond.
SuFIA-BC: Generating High Quality Demonstration Data for Visuomotor Policy Learning in Surgical Subtasks
Apr 21, 2025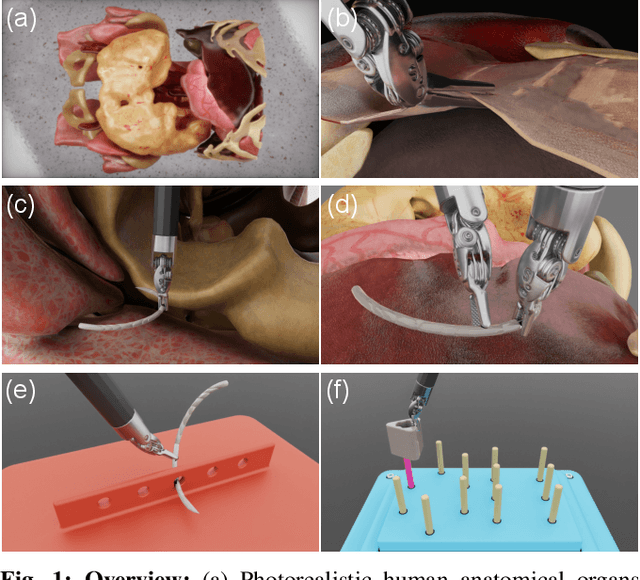
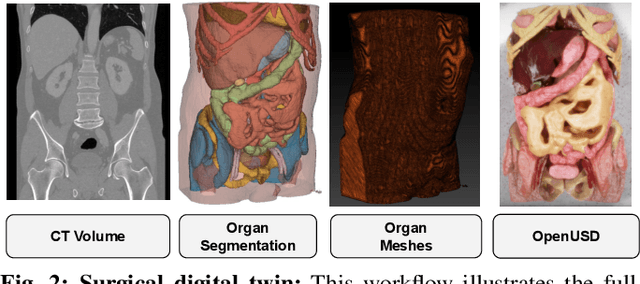
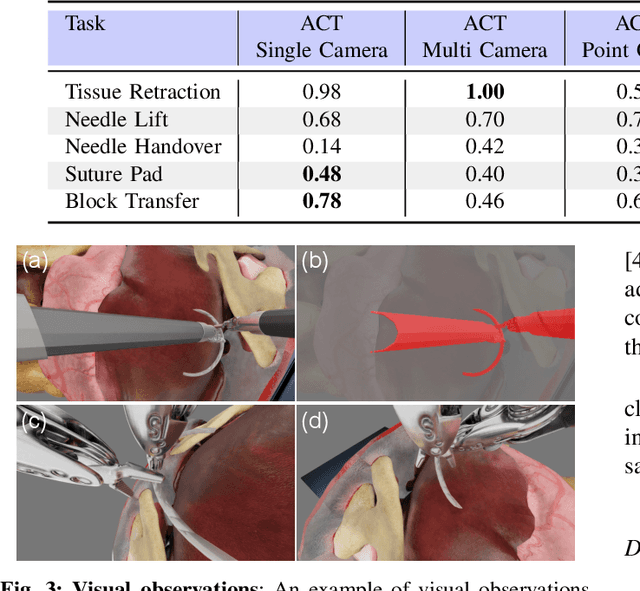

Behavior cloning facilitates the learning of dexterous manipulation skills, yet the complexity of surgical environments, the difficulty and expense of obtaining patient data, and robot calibration errors present unique challenges for surgical robot learning. We provide an enhanced surgical digital twin with photorealistic human anatomical organs, integrated into a comprehensive simulator designed to generate high-quality synthetic data to solve fundamental tasks in surgical autonomy. We present SuFIA-BC: visual Behavior Cloning policies for Surgical First Interactive Autonomy Assistants. We investigate visual observation spaces including multi-view cameras and 3D visual representations extracted from a single endoscopic camera view. Through systematic evaluation, we find that the diverse set of photorealistic surgical tasks introduced in this work enables a comprehensive evaluation of prospective behavior cloning models for the unique challenges posed by surgical environments. We observe that current state-of-the-art behavior cloning techniques struggle to solve the contact-rich and complex tasks evaluated in this work, regardless of their underlying perception or control architectures. These findings highlight the importance of customizing perception pipelines and control architectures, as well as curating larger-scale synthetic datasets that meet the specific demands of surgical tasks. Project website: https://orbit-surgical.github.io/sufia-bc/