 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLight Field Networks: Neural Scene Representations with Single-Evaluation Rendering
Jun 04, 2021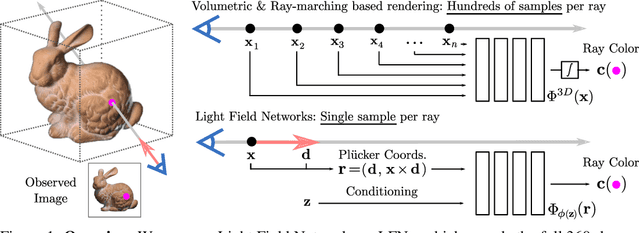

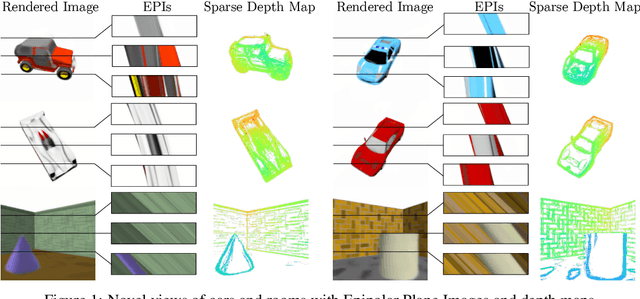
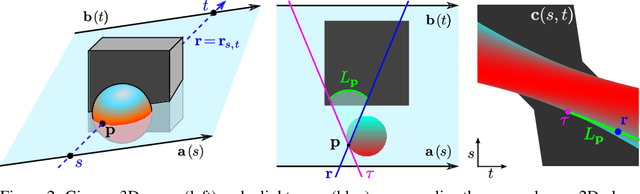
Inferring representations of 3D scenes from 2D observations is a fundamental problem of computer graphics, computer vision, and artificial intelligence. Emerging 3D-structured neural scene representations are a promising approach to 3D scene understanding. In this work, we propose a novel neural scene representation, Light Field Networks or LFNs, which represent both geometry and appearance of the underlying 3D scene in a 360-degree, four-dimensional light field parameterized via a neural implicit representation. Rendering a ray from an LFN requires only a *single* network evaluation, as opposed to hundreds of evaluations per ray for ray-marching or volumetric based renderers in 3D-structured neural scene representations. In the setting of simple scenes, we leverage meta-learning to learn a prior over LFNs that enables multi-view consistent light field reconstruction from as little as a single image observation. This results in dramatic reductions in time and memory complexity, and enables real-time rendering. The cost of storing a 360-degree light field via an LFN is two orders of magnitude lower than conventional methods such as the Lumigraph. Utilizing the analytical differentiability of neural implicit representations and a novel parameterization of light space, we further demonstrate the extraction of sparse depth maps from LFNs.
Learning Neuro-Symbolic Relational Transition Models for Bilevel Planning
May 28, 2021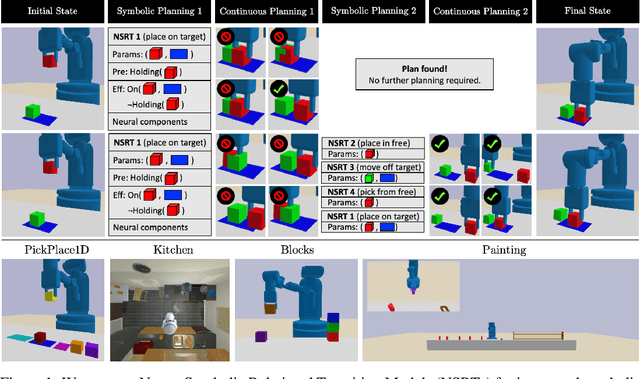

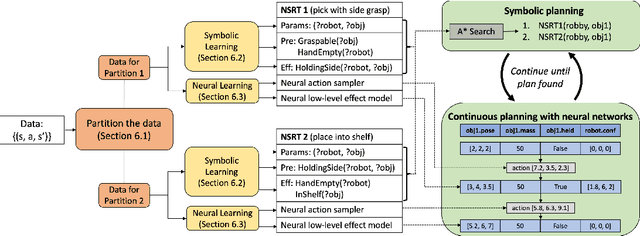

Despite recent, independent progress in model-based reinforcement learning and integrated symbolic-geometric robotic planning, synthesizing these techniques remains challenging because of their disparate assumptions and strengths. In this work, we take a step toward bridging this gap with Neuro-Symbolic Relational Transition Models (NSRTs), a novel class of transition models that are data-efficient to learn, compatible with powerful robotic planning methods, and generalizable over objects. NSRTs have both symbolic and neural components, enabling a bilevel planning scheme where symbolic AI planning in an outer loop guides continuous planning with neural models in an inner loop. Experiments in four robotic planning domains show that NSRTs can be learned after only tens or hundreds of training episodes, and then used for fast planning in new tasks that require up to 60 actions to reach the goal and involve many more objects than were seen during training. Video: https://tinyurl.com/chitnis-nsrts
PlasticineLab: A Soft-Body Manipulation Benchmark with Differentiable Physics
Apr 07, 2021
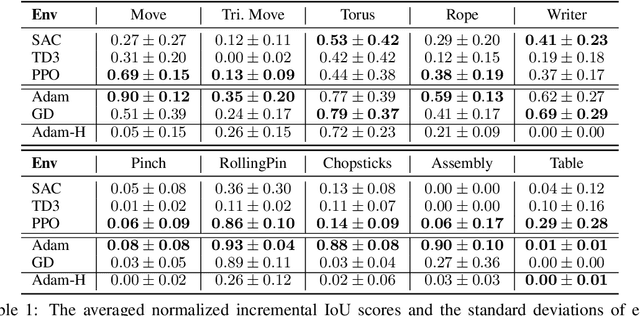
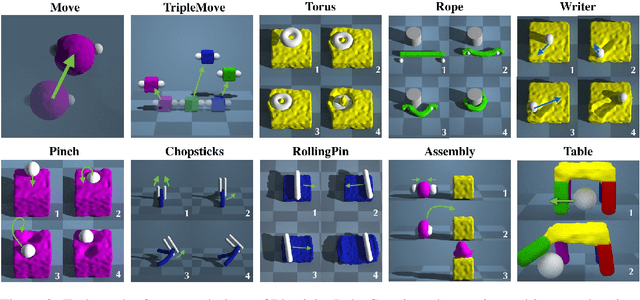
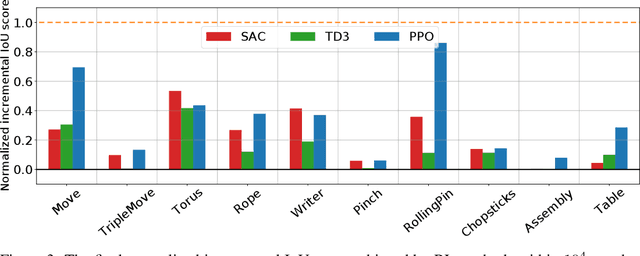
Simulated virtual environments serve as one of the main driving forces behind developing and evaluating skill learning algorithms. However, existing environments typically only simulate rigid body physics. Additionally, the simulation process usually does not provide gradients that might be useful for planning and control optimizations. We introduce a new differentiable physics benchmark called PasticineLab, which includes a diverse collection of soft body manipulation tasks. In each task, the agent uses manipulators to deform the plasticine into the desired configuration. The underlying physics engine supports differentiable elastic and plastic deformation using the DiffTaichi system, posing many under-explored challenges to robotic agents. We evaluate several existing reinforcement learning (RL) methods and gradient-based methods on this benchmark. Experimental results suggest that 1) RL-based approaches struggle to solve most of the tasks efficiently; 2) gradient-based approaches, by optimizing open-loop control sequences with the built-in differentiable physics engine, can rapidly find a solution within tens of iterations, but still fall short on multi-stage tasks that require long-term planning. We expect that PlasticineLab will encourage the development of novel algorithms that combine differentiable physics and RL for more complex physics-based skill learning tasks.
Grounding Physical Concepts of Objects and Events Through Dynamic Visual Reasoning
Mar 30, 2021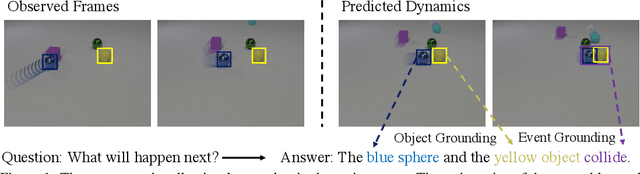
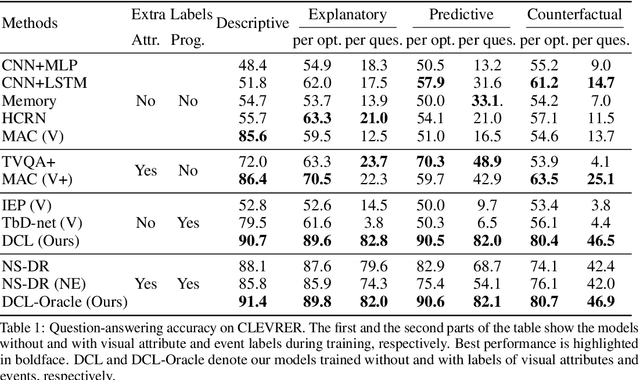
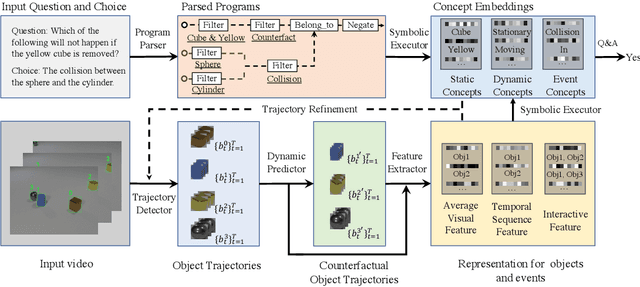

We study the problem of dynamic visual reasoning on raw videos. This is a challenging problem; currently, state-of-the-art models often require dense supervision on physical object properties and events from simulation, which are impractical to obtain in real life. In this paper, we present the Dynamic Concept Learner (DCL), a unified framework that grounds physical objects and events from video and language. DCL first adopts a trajectory extractor to track each object over time and to represent it as a latent, object-centric feature vector. Building upon this object-centric representation, DCL learns to approximate the dynamic interaction among objects using graph networks. DCL further incorporates a semantic parser to parse questions into semantic programs and, finally, a program executor to run the program to answer the question, levering the learned dynamics model. After training, DCL can detect and associate objects across the frames, ground visual properties, and physical events, understand the causal relationship between events, make future and counterfactual predictions, and leverage these extracted presentations for answering queries. DCL achieves state-of-the-art performance on CLEVRER, a challenging causal video reasoning dataset, even without using ground-truth attributes and collision labels from simulations for training. We further test DCL on a newly proposed video-retrieval and event localization dataset derived from CLEVRER, showing its strong generalization capacity.
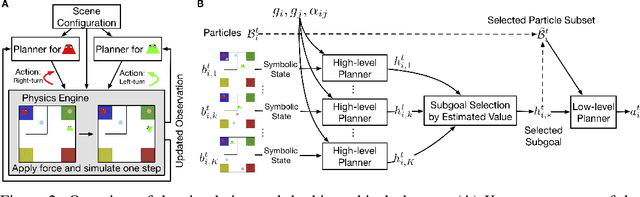
The ThreeDWorld Transport Challenge: A Visually Guided Task-and-Motion Planning Benchmark for Physically Realistic Embodied AI
Mar 25, 2021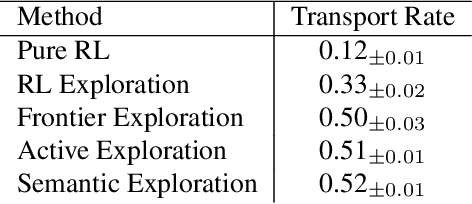
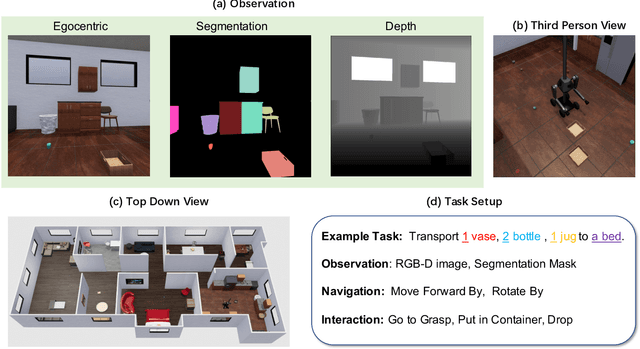
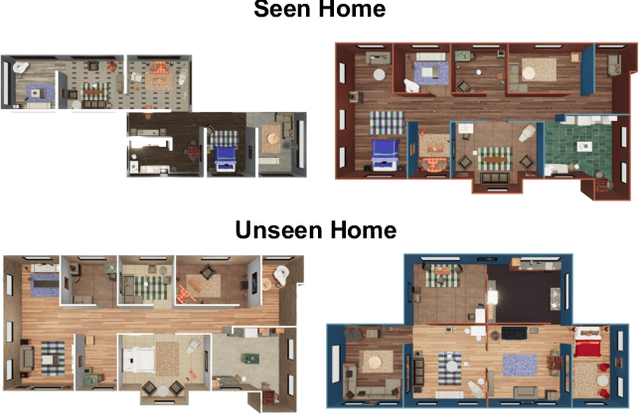
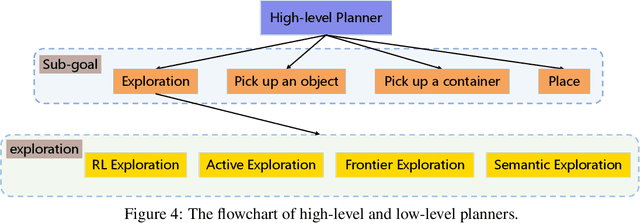
We introduce a visually-guided and physics-driven task-and-motion planning benchmark, which we call the ThreeDWorld Transport Challenge. In this challenge, an embodied agent equipped with two 9-DOF articulated arms is spawned randomly in a simulated physical home environment. The agent is required to find a small set of objects scattered around the house, pick them up, and transport them to a desired final location. We also position containers around the house that can be used as tools to assist with transporting objects efficiently. To complete the task, an embodied agent must plan a sequence of actions to change the state of a large number of objects in the face of realistic physical constraints. We build this benchmark challenge using the ThreeDWorld simulation: a virtual 3D environment where all objects respond to physics, and where can be controlled using fully physics-driven navigation and interaction API. We evaluate several existing agents on this benchmark. Experimental results suggest that: 1) a pure RL model struggles on this challenge; 2) hierarchical planning-based agents can transport some objects but still far from solving this task. We anticipate that this benchmark will empower researchers to develop more intelligent physics-driven robots for the physical world.
PHASE: PHysically-grounded Abstract Social Events for Machine Social Perception
Mar 19, 2021

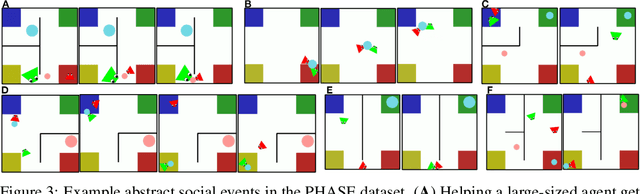
The ability to perceive and reason about social interactions in the context of physical environments is core to human social intelligence and human-machine cooperation. However, no prior dataset or benchmark has systematically evaluated physically grounded perception of complex social interactions that go beyond short actions, such as high-fiving, or simple group activities, such as gathering. In this work, we create a dataset of physically-grounded abstract social events, PHASE, that resemble a wide range of real-life social interactions by including social concepts such as helping another agent. PHASE consists of 2D animations of pairs of agents moving in a continuous space generated procedurally using a physics engine and a hierarchical planner. Agents have a limited field of view, and can interact with multiple objects, in an environment that has multiple landmarks and obstacles. Using PHASE, we design a social recognition task and a social prediction task. PHASE is validated with human experiments demonstrating that humans perceive rich interactions in the social events, and that the simulated agents behave similarly to humans. As a baseline model, we introduce a Bayesian inverse planning approach, SIMPLE (SIMulation, Planning and Local Estimation), which outperforms state-of-the-art feed-forward neural networks. We hope that PHASE can serve as a difficult new challenge for developing new models that can recognize complex social interactions.
Learning Task Decomposition with Ordered Memory Policy Network
Mar 19, 2021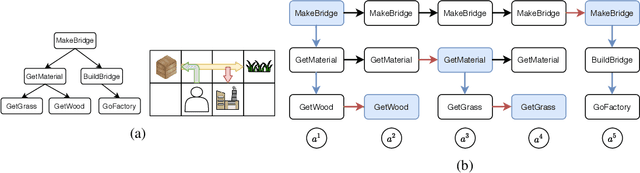
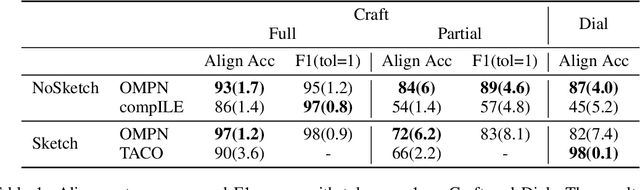
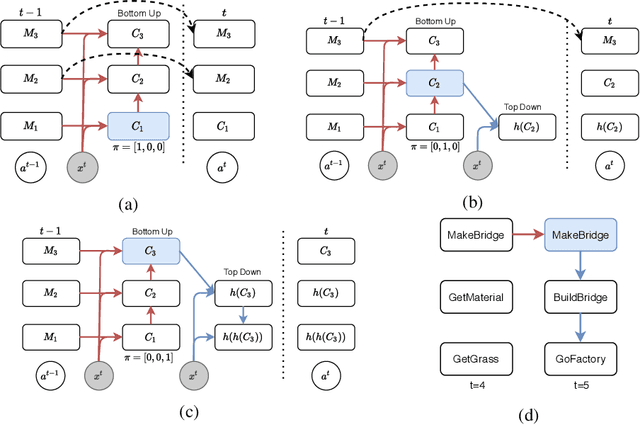
Many complex real-world tasks are composed of several levels of sub-tasks. Humans leverage these hierarchical structures to accelerate the learning process and achieve better generalization. In this work, we study the inductive bias and propose Ordered Memory Policy Network (OMPN) to discover subtask hierarchy by learning from demonstration. The discovered subtask hierarchy could be used to perform task decomposition, recovering the subtask boundaries in an unstruc-tured demonstration. Experiments on Craft and Dial demonstrate that our modelcan achieve higher task decomposition performance under both unsupervised and weakly supervised settings, comparing with strong baselines. OMPN can also bedirectly applied to partially observable environments and still achieve higher task decomposition performance. Our visualization further confirms that the subtask hierarchy can emerge in our model.
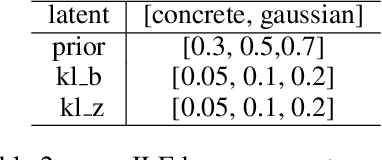
AGENT: A Benchmark for Core Psychological Reasoning
Feb 25, 2021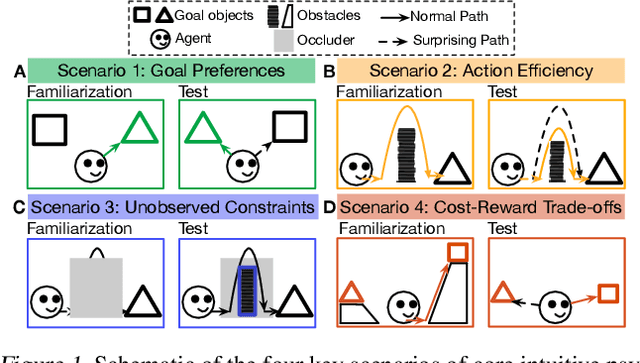
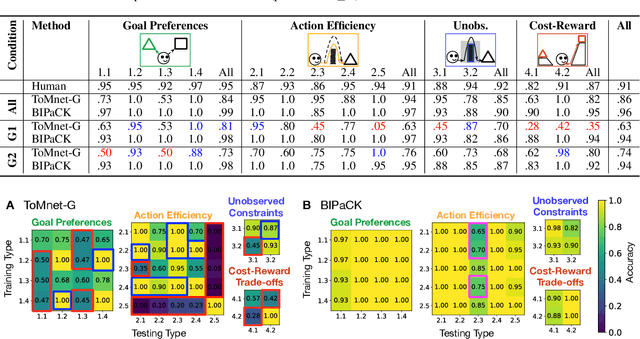
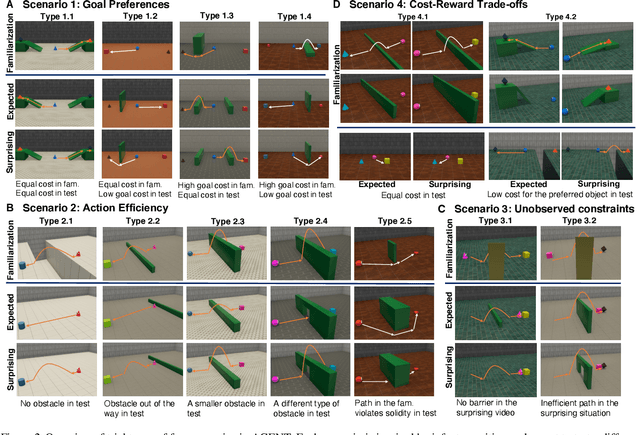
For machine agents to successfully interact with humans in real-world settings, they will need to develop an understanding of human mental life. Intuitive psychology, the ability to reason about hidden mental variables that drive observable actions, comes naturally to people: even pre-verbal infants can tell agents from objects, expecting agents to act efficiently to achieve goals given constraints. Despite recent interest in machine agents that reason about other agents, it is not clear if such agents learn or hold the core psychology principles that drive human reasoning. Inspired by cognitive development studies on intuitive psychology, we present a benchmark consisting of a large dataset of procedurally generated 3D animations, AGENT (Action, Goal, Efficiency, coNstraint, uTility), structured around four scenarios (goal preferences, action efficiency, unobserved constraints, and cost-reward trade-offs) that probe key concepts of core intuitive psychology. We validate AGENT with human-ratings, propose an evaluation protocol emphasizing generalization, and compare two strong baselines built on Bayesian inverse planning and a Theory of Mind neural network. Our results suggest that to pass the designed tests of core intuitive psychology at human levels, a model must acquire or have built-in representations of how agents plan, combining utility computations and core knowledge of objects and physics.
Augmenting Policy Learning with Routines Discovered from a Demonstration
Dec 24, 2020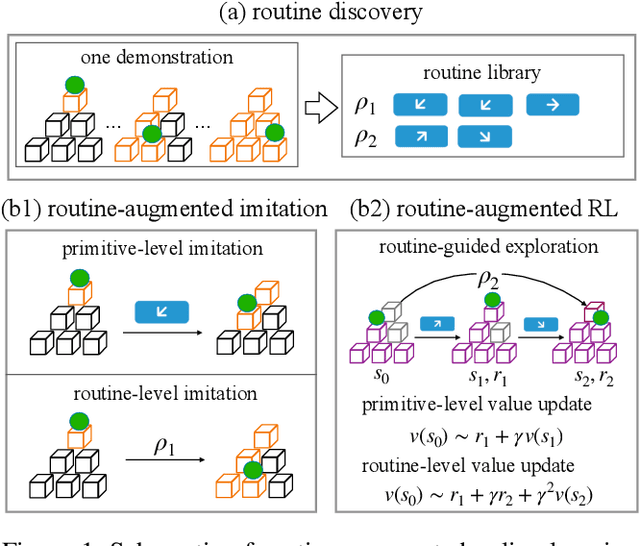
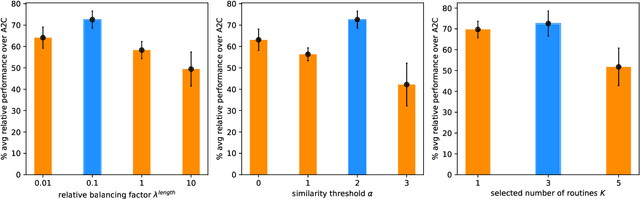
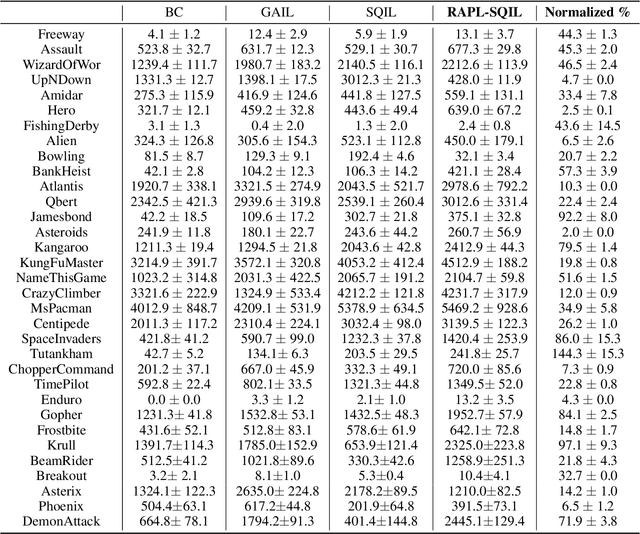
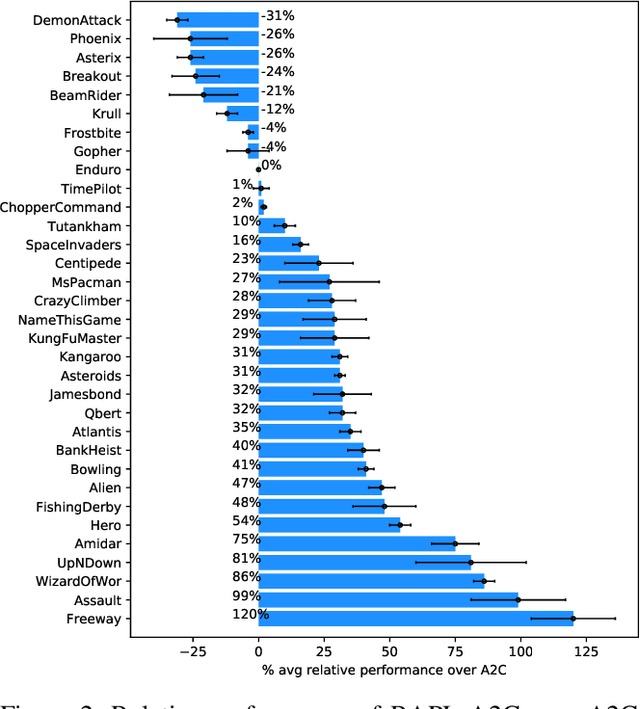
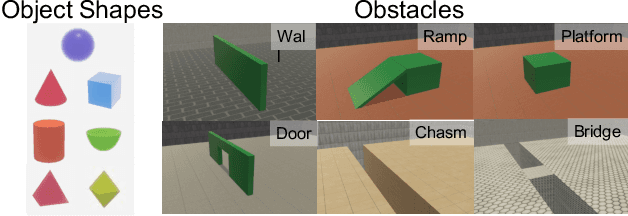
Humans can abstract prior knowledge from very little data and use it to boost skill learning. In this paper, we propose routine-augmented policy learning (RAPL), which discovers routines composed of primitive actions from a single demonstration and uses discovered routines to augment policy learning. To discover routines from the demonstration, we first abstract routine candidates by identifying grammar over the demonstrated action trajectory. Then, the best routines measured by length and frequency are selected to form a routine library. We propose to learn policy simultaneously at primitive-level and routine-level with discovered routines, leveraging the temporal structure of routines. Our approach enables imitating expert behavior at multiple temporal scales for imitation learning and promotes reinforcement learning exploration. Extensive experiments on Atari games demonstrate that RAPL improves the state-of-the-art imitation learning method SQIL and reinforcement learning method A2C. Further, we show that discovered routines can generalize to unseen levels and difficulties on the CoinRun benchmark.
Representing Partial Programs with Blended Abstract Semantics
Dec 23, 2020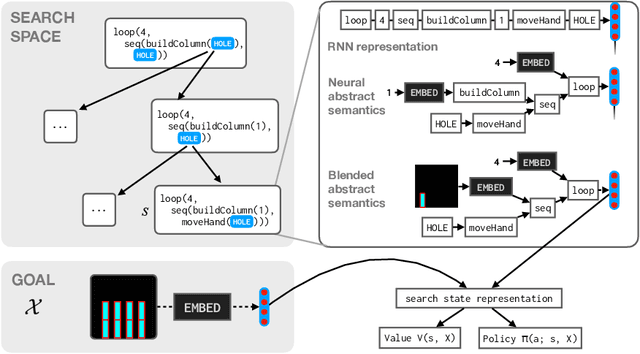
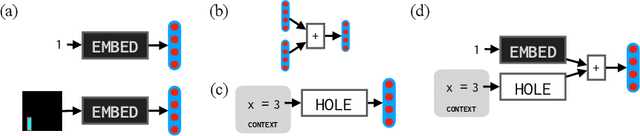
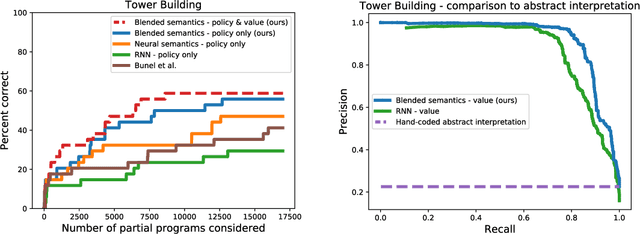

Synthesizing programs from examples requires searching over a vast, combinatorial space of possible programs. In this search process, a key challenge is representing the behavior of a partially written program before it can be executed, to judge if it is on the right track and predict where to search next. We introduce a general technique for representing partially written programs in a program synthesis engine. We take inspiration from the technique of abstract interpretation, in which an approximate execution model is used to determine if an unfinished program will eventually satisfy a goal specification. Here we learn an approximate execution model implemented as a modular neural network. By constructing compositional program representations that implicitly encode the interpretation semantics of the underlying programming language, we can represent partial programs using a flexible combination of concrete execution state and learned neural representations, using the learned approximate semantics when concrete semantics are not known (in unfinished parts of the program). We show that these hybrid neuro-symbolic representations enable execution-guided synthesizers to use more powerful language constructs, such as loops and higher-order functions, and can be used to synthesize programs more accurately for a given search budget than pure neural approaches in several domains.