 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Generation with a Sphere Encoder
Feb 16, 2026We introduce the Sphere Encoder, an efficient generative framework capable of producing images in a single forward pass and competing with many-step diffusion models using fewer than five steps. Our approach works by learning an encoder that maps natural images uniformly onto a spherical latent space, and a decoder that maps random latent vectors back to the image space. Trained solely through image reconstruction losses, the model generates an image by simply decoding a random point on the sphere. Our architecture naturally supports conditional generation, and looping the encoder/decoder a few times can further enhance image quality. Across several datasets, the sphere encoder approach yields performance competitive with state of the art diffusions, but with a small fraction of the inference cost. Project page is available at https://sphere-encoder.github.io .
HairWeaver: Few-Shot Photorealistic Hair Motion Synthesis with Sim-to-Real Guided Video Diffusion
Feb 11, 2026We present HairWeaver, a diffusion-based pipeline that animates a single human image with realistic and expressive hair dynamics. While existing methods successfully control body pose, they lack specific control over hair, and as a result, fail to capture the intricate hair motions, resulting in stiff and unrealistic animations. HairWeaver overcomes this limitation using two specialized modules: a Motion-Context-LoRA to integrate motion conditions and a Sim2Real-Domain-LoRA to preserve the subject's photoreal appearance across different data domains. These lightweight components are designed to guide a video diffusion backbone while maintaining its core generative capabilities. By training on a specialized dataset of dynamic human motion generated from a CG simulator, HairWeaver affords fine control over hair motion and ultimately learns to produce highly realistic hair that responds naturally to movement. Comprehensive evaluations demonstrate that our approach sets a new state of the art, producing lifelike human hair animations with dynamic details.
The Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
PhyGDPO: Physics-Aware Groupwise Direct Preference Optimization for Physically Consistent Text-to-Video Generation
Dec 31, 2025Recent advances in text-to-video (T2V) generation have achieved good visual quality, yet synthesizing videos that faithfully follow physical laws remains an open challenge. Existing methods mainly based on graphics or prompt extension struggle to generalize beyond simple simulated environments or learn implicit physical reasoning. The scarcity of training data with rich physics interactions and phenomena is also a problem. In this paper, we first introduce a Physics-Augmented video data construction Pipeline, PhyAugPipe, that leverages a vision-language model (VLM) with chain-of-thought reasoning to collect a large-scale training dataset, PhyVidGen-135K. Then we formulate a principled Physics-aware Groupwise Direct Preference Optimization, PhyGDPO, framework that builds upon the groupwise Plackett-Luce probabilistic model to capture holistic preferences beyond pairwise comparisons. In PhyGDPO, we design a Physics-Guided Rewarding (PGR) scheme that embeds VLM-based physics rewards to steer optimization toward physical consistency. We also propose a LoRA-Switch Reference (LoRA-SR) scheme that eliminates memory-heavy reference duplication for efficient training. Experiments show that our method significantly outperforms state-of-the-art open-source methods on PhyGenBench and VideoPhy2. Please check our project page at https://caiyuanhao1998.github.io/project/PhyGDPO for more video results. Our code, models, and data will be released at https://github.com/caiyuanhao1998/Open-PhyGDPO
Exploring MLLM-Diffusion Information Transfer with MetaCanvas
Dec 12, 2025Multimodal learning has rapidly advanced visual understanding, largely via multimodal large language models (MLLMs) that use powerful LLMs as cognitive cores. In visual generation, however, these powerful core models are typically reduced to global text encoders for diffusion models, leaving most of their reasoning and planning ability unused. This creates a gap: current multimodal LLMs can parse complex layouts, attributes, and knowledge-intensive scenes, yet struggle to generate images or videos with equally precise and structured control. We propose MetaCanvas, a lightweight framework that lets MLLMs reason and plan directly in spatial and spatiotemporal latent spaces and interface tightly with diffusion generators. We empirically implement MetaCanvas on three different diffusion backbones and evaluate it across six tasks, including text-to-image generation, text/image-to-video generation, image/video editing, and in-context video generation, each requiring precise layouts, robust attribute binding, and reasoning-intensive control. MetaCanvas consistently outperforms global-conditioning baselines, suggesting that treating MLLMs as latent-space planners is a promising direction for narrowing the gap between multimodal understanding and generation.
Token-Shuffle: Towards High-Resolution Image Generation with Autoregressive Models
Apr 24, 2025Autoregressive (AR) models, long dominant in language generation, are increasingly applied to image synthesis but are often considered less competitive than Diffusion-based models. A primary limitation is the substantial number of image tokens required for AR models, which constrains both training and inference efficiency, as well as image resolution. To address this, we present Token-Shuffle, a novel yet simple method that reduces the number of image tokens in Transformer. Our key insight is the dimensional redundancy of visual vocabularies in Multimodal Large Language Models (MLLMs), where low-dimensional visual codes from visual encoder are directly mapped to high-dimensional language vocabularies. Leveraging this, we consider two key operations: token-shuffle, which merges spatially local tokens along channel dimension to decrease the input token number, and token-unshuffle, which untangles the inferred tokens after Transformer blocks to restore the spatial arrangement for output. Jointly training with textual prompts, our strategy requires no additional pretrained text-encoder and enables MLLMs to support extremely high-resolution image synthesis in a unified next-token prediction way while maintaining efficient training and inference. For the first time, we push the boundary of AR text-to-image generation to a resolution of 2048x2048 with gratifying generation performance. In GenAI-benchmark, our 2.7B model achieves 0.77 overall score on hard prompts, outperforming AR models LlamaGen by 0.18 and diffusion models LDM by 0.15. Exhaustive large-scale human evaluations also demonstrate our prominent image generation ability in terms of text-alignment, visual flaw, and visual appearance. We hope that Token-Shuffle can serve as a foundational design for efficient high-resolution image generation within MLLMs.
Transfer between Modalities with MetaQueries
Apr 08, 2025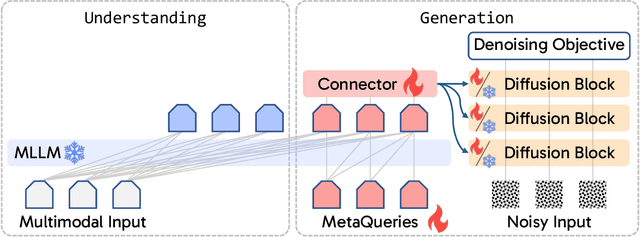


Unified multimodal models aim to integrate understanding (text output) and generation (pixel output), but aligning these different modalities within a single architecture often demands complex training recipes and careful data balancing. We introduce MetaQueries, a set of learnable queries that act as an efficient interface between autoregressive multimodal LLMs (MLLMs) and diffusion models. MetaQueries connects the MLLM's latents to the diffusion decoder, enabling knowledge-augmented image generation by leveraging the MLLM's deep understanding and reasoning capabilities. Our method simplifies training, requiring only paired image-caption data and standard diffusion objectives. Notably, this transfer is effective even when the MLLM backbone remains frozen, thereby preserving its state-of-the-art multimodal understanding capabilities while achieving strong generative performance. Additionally, our method is flexible and can be easily instruction-tuned for advanced applications such as image editing and subject-driven generation.
MoCha: Towards Movie-Grade Talking Character Synthesis
Mar 30, 2025



Recent advancements in video generation have achieved impressive motion realism, yet they often overlook character-driven storytelling, a crucial task for automated film, animation generation. We introduce Talking Characters, a more realistic task to generate talking character animations directly from speech and text. Unlike talking head, Talking Characters aims at generating the full portrait of one or more characters beyond the facial region. In this paper, we propose MoCha, the first of its kind to generate talking characters. To ensure precise synchronization between video and speech, we propose a speech-video window attention mechanism that effectively aligns speech and video tokens. To address the scarcity of large-scale speech-labeled video datasets, we introduce a joint training strategy that leverages both speech-labeled and text-labeled video data, significantly improving generalization across diverse character actions. We also design structured prompt templates with character tags, enabling, for the first time, multi-character conversation with turn-based dialogue-allowing AI-generated characters to engage in context-aware conversations with cinematic coherence. Extensive qualitative and quantitative evaluations, including human preference studies and benchmark comparisons, demonstrate that MoCha sets a new standard for AI-generated cinematic storytelling, achieving superior realism, expressiveness, controllability and generalization.
LinGen: Towards High-Resolution Minute-Length Text-to-Video Generation with Linear Computational Complexity
Dec 13, 2024



Text-to-video generation enhances content creation but is highly computationally intensive: The computational cost of Diffusion Transformers (DiTs) scales quadratically in the number of pixels. This makes minute-length video generation extremely expensive, limiting most existing models to generating videos of only 10-20 seconds length. We propose a Linear-complexity text-to-video Generation (LinGen) framework whose cost scales linearly in the number of pixels. For the first time, LinGen enables high-resolution minute-length video generation on a single GPU without compromising quality. It replaces the computationally-dominant and quadratic-complexity block, self-attention, with a linear-complexity block called MATE, which consists of an MA-branch and a TE-branch. The MA-branch targets short-to-long-range correlations, combining a bidirectional Mamba2 block with our token rearrangement method, Rotary Major Scan, and our review tokens developed for long video generation. The TE-branch is a novel TEmporal Swin Attention block that focuses on temporal correlations between adjacent tokens and medium-range tokens. The MATE block addresses the adjacency preservation issue of Mamba and improves the consistency of generated videos significantly. Experimental results show that LinGen outperforms DiT (with a 75.6% win rate) in video quality with up to 15$\times$ (11.5$\times$) FLOPs (latency) reduction. Furthermore, both automatic metrics and human evaluation demonstrate our LinGen-4B yields comparable video quality to state-of-the-art models (with a 50.5%, 52.1%, 49.1% win rate with respect to Gen-3, LumaLabs, and Kling, respectively). This paves the way to hour-length movie generation and real-time interactive video generation. We provide 68s video generation results and more examples in our project website: https://lineargen.github.io/.
Movie Gen: A Cast of Media Foundation Models
Oct 17, 2024



We present Movie Gen, a cast of foundation models that generates high-quality, 1080p HD videos with different aspect ratios and synchronized audio. We also show additional capabilities such as precise instruction-based video editing and generation of personalized videos based on a user's image. Our models set a new state-of-the-art on multiple tasks: text-to-video synthesis, video personalization, video editing, video-to-audio generation, and text-to-audio generation. Our largest video generation model is a 30B parameter transformer trained with a maximum context length of 73K video tokens, corresponding to a generated video of 16 seconds at 16 frames-per-second. We show multiple technical innovations and simplifications on the architecture, latent spaces, training objectives and recipes, data curation, evaluation protocols, parallelization techniques, and inference optimizations that allow us to reap the benefits of scaling pre-training data, model size, and training compute for training large scale media generation models. We hope this paper helps the research community to accelerate progress and innovation in media generation models. All videos from this paper are available at https://go.fb.me/MovieGenResearchVideos.