 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Token-Shuffle: Towards High-Resolution Image Generation with Autoregressive Models
Apr 24, 2025Autoregressive (AR) models, long dominant in language generation, are increasingly applied to image synthesis but are often considered less competitive than Diffusion-based models. A primary limitation is the substantial number of image tokens required for AR models, which constrains both training and inference efficiency, as well as image resolution. To address this, we present Token-Shuffle, a novel yet simple method that reduces the number of image tokens in Transformer. Our key insight is the dimensional redundancy of visual vocabularies in Multimodal Large Language Models (MLLMs), where low-dimensional visual codes from visual encoder are directly mapped to high-dimensional language vocabularies. Leveraging this, we consider two key operations: token-shuffle, which merges spatially local tokens along channel dimension to decrease the input token number, and token-unshuffle, which untangles the inferred tokens after Transformer blocks to restore the spatial arrangement for output. Jointly training with textual prompts, our strategy requires no additional pretrained text-encoder and enables MLLMs to support extremely high-resolution image synthesis in a unified next-token prediction way while maintaining efficient training and inference. For the first time, we push the boundary of AR text-to-image generation to a resolution of 2048x2048 with gratifying generation performance. In GenAI-benchmark, our 2.7B model achieves 0.77 overall score on hard prompts, outperforming AR models LlamaGen by 0.18 and diffusion models LDM by 0.15. Exhaustive large-scale human evaluations also demonstrate our prominent image generation ability in terms of text-alignment, visual flaw, and visual appearance. We hope that Token-Shuffle can serve as a foundational design for efficient high-resolution image generation within MLLMs.
LinGen: Towards High-Resolution Minute-Length Text-to-Video Generation with Linear Computational Complexity
Dec 13, 2024



Text-to-video generation enhances content creation but is highly computationally intensive: The computational cost of Diffusion Transformers (DiTs) scales quadratically in the number of pixels. This makes minute-length video generation extremely expensive, limiting most existing models to generating videos of only 10-20 seconds length. We propose a Linear-complexity text-to-video Generation (LinGen) framework whose cost scales linearly in the number of pixels. For the first time, LinGen enables high-resolution minute-length video generation on a single GPU without compromising quality. It replaces the computationally-dominant and quadratic-complexity block, self-attention, with a linear-complexity block called MATE, which consists of an MA-branch and a TE-branch. The MA-branch targets short-to-long-range correlations, combining a bidirectional Mamba2 block with our token rearrangement method, Rotary Major Scan, and our review tokens developed for long video generation. The TE-branch is a novel TEmporal Swin Attention block that focuses on temporal correlations between adjacent tokens and medium-range tokens. The MATE block addresses the adjacency preservation issue of Mamba and improves the consistency of generated videos significantly. Experimental results show that LinGen outperforms DiT (with a 75.6% win rate) in video quality with up to 15$\times$ (11.5$\times$) FLOPs (latency) reduction. Furthermore, both automatic metrics and human evaluation demonstrate our LinGen-4B yields comparable video quality to state-of-the-art models (with a 50.5%, 52.1%, 49.1% win rate with respect to Gen-3, LumaLabs, and Kling, respectively). This paves the way to hour-length movie generation and real-time interactive video generation. We provide 68s video generation results and more examples in our project website: https://lineargen.github.io/.
Movie Gen: A Cast of Media Foundation Models
Oct 17, 2024



We present Movie Gen, a cast of foundation models that generates high-quality, 1080p HD videos with different aspect ratios and synchronized audio. We also show additional capabilities such as precise instruction-based video editing and generation of personalized videos based on a user's image. Our models set a new state-of-the-art on multiple tasks: text-to-video synthesis, video personalization, video editing, video-to-audio generation, and text-to-audio generation. Our largest video generation model is a 30B parameter transformer trained with a maximum context length of 73K video tokens, corresponding to a generated video of 16 seconds at 16 frames-per-second. We show multiple technical innovations and simplifications on the architecture, latent spaces, training objectives and recipes, data curation, evaluation protocols, parallelization techniques, and inference optimizations that allow us to reap the benefits of scaling pre-training data, model size, and training compute for training large scale media generation models. We hope this paper helps the research community to accelerate progress and innovation in media generation models. All videos from this paper are available at https://go.fb.me/MovieGenResearchVideos.
Fast Trainable Projection for Robust Fine-Tuning
Oct 29, 2023



Robust fine-tuning aims to achieve competitive in-distribution (ID) performance while maintaining the out-of-distribution (OOD) robustness of a pre-trained model when transferring it to a downstream task. Recently, projected gradient descent has been successfully used in robust fine-tuning by constraining the deviation from the initialization of the fine-tuned model explicitly through projection. However, algorithmically, two limitations prevent this method from being adopted more widely, scalability and efficiency. In this paper, we propose a new projection-based fine-tuning algorithm, Fast Trainable Projection (FTP) for computationally efficient learning of per-layer projection constraints, resulting in an average $35\%$ speedup on our benchmarks compared to prior works. FTP can be combined with existing optimizers such as AdamW, and be used in a plug-and-play fashion. Finally, we show that FTP is a special instance of hyper-optimizers that tune the hyper-parameters of optimizers in a learnable manner through nested differentiation. Empirically, we show superior robustness on OOD datasets, including domain shifts and natural corruptions, across four different vision tasks with five different pre-trained models. Additionally, we demonstrate that FTP is broadly applicable and beneficial to other learning scenarios such as low-label and continual learning settings thanks to its easy adaptability. The code will be available at https://github.com/GT-RIPL/FTP.git.
Missing Modality Robustness in Semi-Supervised Multi-Modal Semantic Segmentation
Apr 21, 2023



Using multiple spatial modalities has been proven helpful in improving semantic segmentation performance. However, there are several real-world challenges that have yet to be addressed: (a) improving label efficiency and (b) enhancing robustness in realistic scenarios where modalities are missing at the test time. To address these challenges, we first propose a simple yet efficient multi-modal fusion mechanism Linear Fusion, that performs better than the state-of-the-art multi-modal models even with limited supervision. Second, we propose M3L: Multi-modal Teacher for Masked Modality Learning, a semi-supervised framework that not only improves the multi-modal performance but also makes the model robust to the realistic missing modality scenario using unlabeled data. We create the first benchmark for semi-supervised multi-modal semantic segmentation and also report the robustness to missing modalities. Our proposal shows an absolute improvement of up to 10% on robust mIoU above the most competitive baselines. Our code is available at https://github.com/harshm121/M3L
Trainable Projected Gradient Method for Robust Fine-tuning
Mar 28, 2023Recent studies on transfer learning have shown that selectively fine-tuning a subset of layers or customizing different learning rates for each layer can greatly improve robustness to out-of-distribution (OOD) data and retain generalization capability in the pre-trained models. However, most of these methods employ manually crafted heuristics or expensive hyper-parameter searches, which prevent them from scaling up to large datasets and neural networks. To solve this problem, we propose Trainable Projected Gradient Method (TPGM) to automatically learn the constraint imposed for each layer for a fine-grained fine-tuning regularization. This is motivated by formulating fine-tuning as a bi-level constrained optimization problem. Specifically, TPGM maintains a set of projection radii, i.e., distance constraints between the fine-tuned model and the pre-trained model, for each layer, and enforces them through weight projections. To learn the constraints, we propose a bi-level optimization to automatically learn the best set of projection radii in an end-to-end manner. Theoretically, we show that the bi-level optimization formulation could explain the regularization capability of TPGM. Empirically, with little hyper-parameter search cost, TPGM outperforms existing fine-tuning methods in OOD performance while matching the best in-distribution (ID) performance. For example, when fine-tuned on DomainNet-Real and ImageNet, compared to vanilla fine-tuning, TPGM shows $22\%$ and $10\%$ relative OOD improvement respectively on their sketch counterparts. Code is available at \url{https://github.com/PotatoTian/TPGM}.
* Accepted to CVPR2023
Polyhistor: Parameter-Efficient Multi-Task Adaptation for Dense Vision Tasks
Oct 07, 2022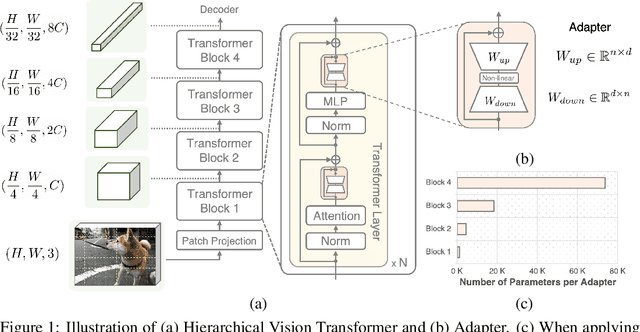
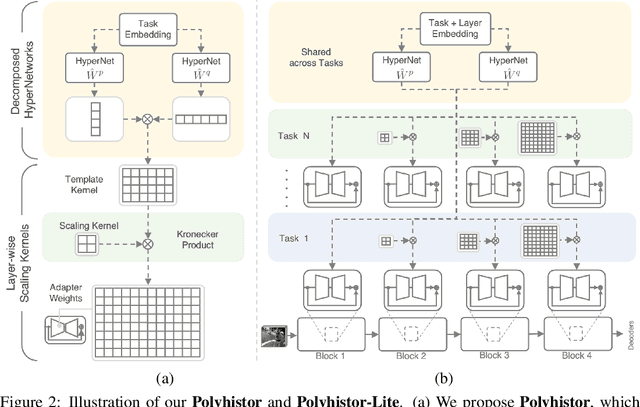

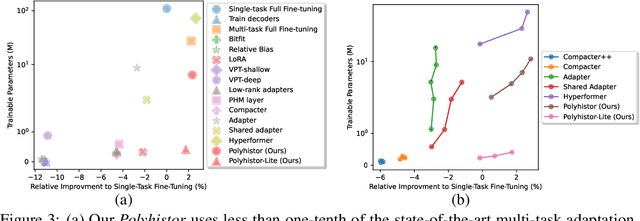
Adapting large-scale pretrained models to various downstream tasks via fine-tuning is a standard method in machine learning. Recently, parameter-efficient fine-tuning methods show promise in adapting a pretrained model to different tasks while training only a few parameters. Despite their success, most existing methods are proposed in Natural Language Processing tasks with language Transformers, and adaptation to Computer Vision tasks with Vision Transformers remains under-explored, especially for dense vision tasks. Further, in multi-task settings, individually fine-tuning and storing separate models for different tasks is inefficient. In this work, we provide an extensive multi-task parameter-efficient benchmark and examine existing parameter-efficient fine-tuning NLP methods for vision tasks. Our results on four different dense vision tasks showed that existing methods cannot be efficiently integrated due to the hierarchical nature of the Hierarchical Vision Transformers. To overcome this issue, we propose Polyhistor and Polyhistor-Lite, consisting of Decomposed HyperNetworks and Layer-wise Scaling Kernels, to share information across different tasks with a few trainable parameters. This leads to favorable performance improvements against existing parameter-efficient methods while using fewer trainable parameters. Specifically, Polyhistor achieves competitive accuracy compared to the state-of-the-art while only using ~10% of their trainable parameters. Furthermore, our methods show larger performance gains when large networks and more pretraining data are used.
Open-Set Semi-Supervised Object Detection
Aug 29, 2022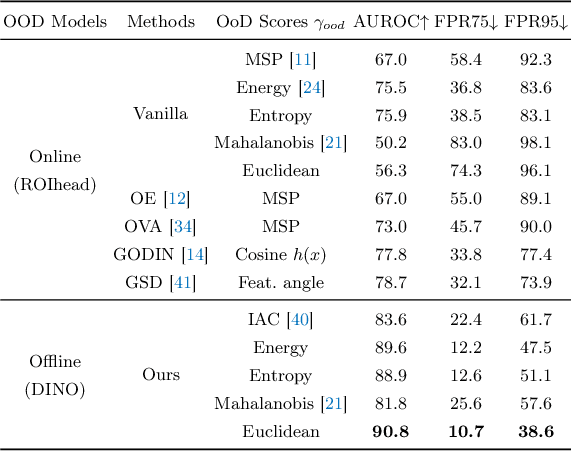
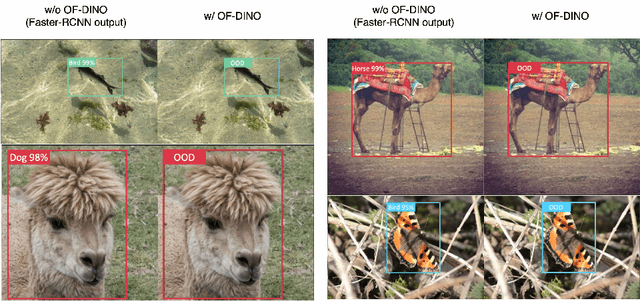
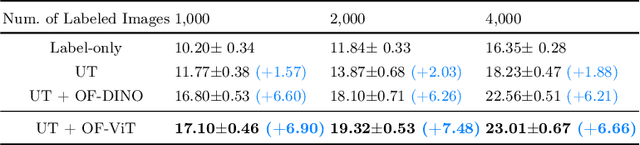

Recent developments for Semi-Supervised Object Detection (SSOD) have shown the promise of leveraging unlabeled data to improve an object detector. However, thus far these methods have assumed that the unlabeled data does not contain out-of-distribution (OOD) classes, which is unrealistic with larger-scale unlabeled datasets. In this paper, we consider a more practical yet challenging problem, Open-Set Semi-Supervised Object Detection (OSSOD). We first find the existing SSOD method obtains a lower performance gain in open-set conditions, and this is caused by the semantic expansion, where the distracting OOD objects are mispredicted as in-distribution pseudo-labels for the semi-supervised training. To address this problem, we consider online and offline OOD detection modules, which are integrated with SSOD methods. With the extensive studies, we found that leveraging an offline OOD detector based on a self-supervised vision transformer performs favorably against online OOD detectors due to its robustness to the interference of pseudo-labeling. In the experiment, our proposed framework effectively addresses the semantic expansion issue and shows consistent improvements on many OSSOD benchmarks, including large-scale COCO-OpenImages. We also verify the effectiveness of our framework under different OSSOD conditions, including varying numbers of in-distribution classes, different degrees of supervision, and different combinations of unlabeled sets.
Unbiased Teacher v2: Semi-supervised Object Detection for Anchor-free and Anchor-based Detectors
Jun 19, 2022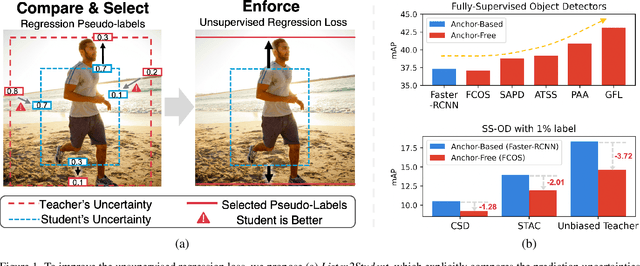

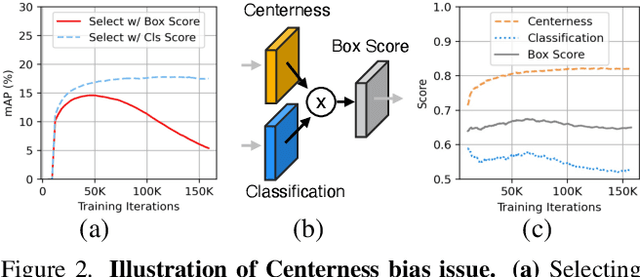
With the recent development of Semi-Supervised Object Detection (SS-OD) techniques, object detectors can be improved by using a limited amount of labeled data and abundant unlabeled data. However, there are still two challenges that are not addressed: (1) there is no prior SS-OD work on anchor-free detectors, and (2) prior works are ineffective when pseudo-labeling bounding box regression. In this paper, we present Unbiased Teacher v2, which shows the generalization of SS-OD method to anchor-free detectors and also introduces Listen2Student mechanism for the unsupervised regression loss. Specifically, we first present a study examining the effectiveness of existing SS-OD methods on anchor-free detectors and find that they achieve much lower performance improvements under the semi-supervised setting. We also observe that box selection with centerness and the localization-based labeling used in anchor-free detectors cannot work well under the semi-supervised setting. On the other hand, our Listen2Student mechanism explicitly prevents misleading pseudo-labels in the training of bounding box regression; we specifically develop a novel pseudo-labeling selection mechanism based on the Teacher and Student's relative uncertainties. This idea contributes to favorable improvement in the regression branch in the semi-supervised setting. Our method, which works for both anchor-free and anchor-based methods, consistently performs favorably against the state-of-the-art methods in VOC, COCO-standard, and COCO-additional.