 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMask Transfiner for High-Quality Instance Segmentation
Nov 26, 2021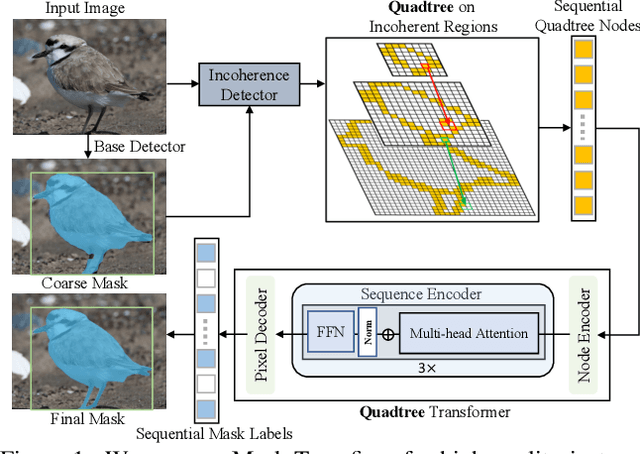
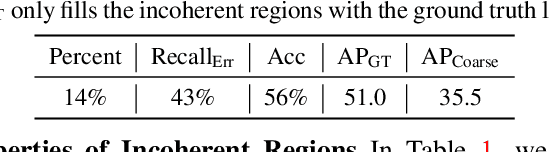

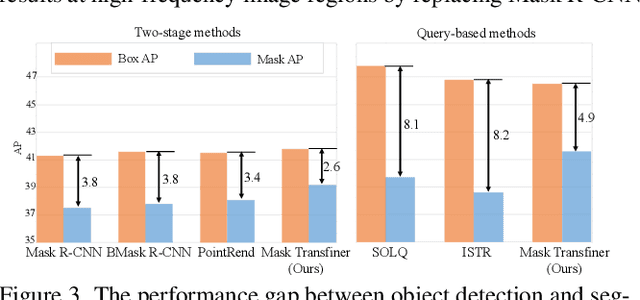
Two-stage and query-based instance segmentation methods have achieved remarkable results. However, their segmented masks are still very coarse. In this paper, we present Mask Transfiner for high-quality and efficient instance segmentation. Instead of operating on regular dense tensors, our Mask Transfiner decomposes and represents the image regions as a quadtree. Our transformer-based approach only processes detected error-prone tree nodes and self-corrects their errors in parallel. While these sparse pixels only constitute a small proportion of the total number, they are critical to the final mask quality. This allows Mask Transfiner to predict highly accurate instance masks, at a low computational cost. Extensive experiments demonstrate that Mask Transfiner outperforms current instance segmentation methods on three popular benchmarks, significantly improving both two-stage and query-based frameworks by a large margin of +3.0 mask AP on COCO and BDD100K, and +6.6 boundary AP on Cityscapes. Our code and trained models will be available at http://vis.xyz/pub/transfiner.
Normalizing Flow as a Flexible Fidelity Objective for Photo-Realistic Super-resolution
Nov 05, 2021
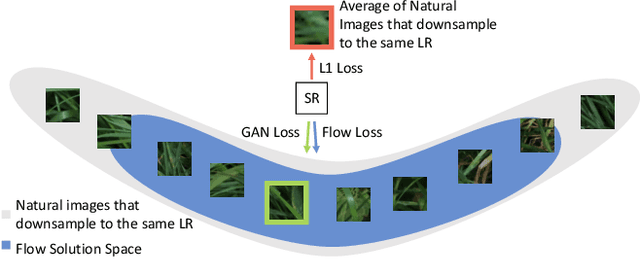
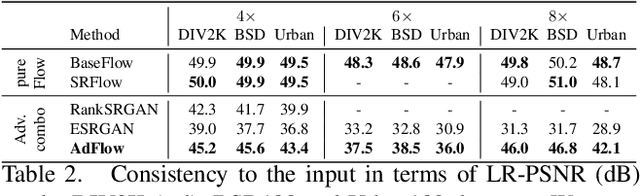
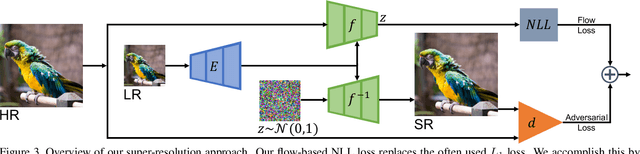
Super-resolution is an ill-posed problem, where a ground-truth high-resolution image represents only one possibility in the space of plausible solutions. Yet, the dominant paradigm is to employ pixel-wise losses, such as L_1, which drive the prediction towards a blurry average. This leads to fundamentally conflicting objectives when combined with adversarial losses, which degrades the final quality. We address this issue by revisiting the L_1 loss and show that it corresponds to a one-layer conditional flow. Inspired by this relation, we explore general flows as a fidelity-based alternative to the L_1 objective. We demonstrate that the flexibility of deeper flows leads to better visual quality and consistency when combined with adversarial losses. We conduct extensive user studies for three datasets and scale factors, where our approach is shown to outperform state-of-the-art methods for photo-realistic super-resolution. Code and trained models will be available at: git.io/AdFlow
Dense Prediction with Attentive Feature Aggregation
Nov 01, 2021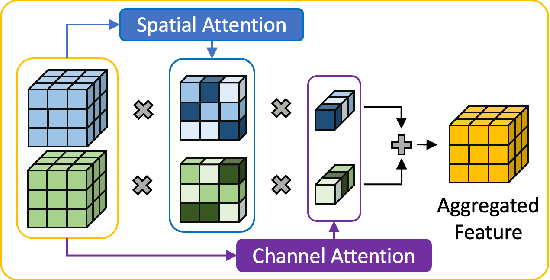
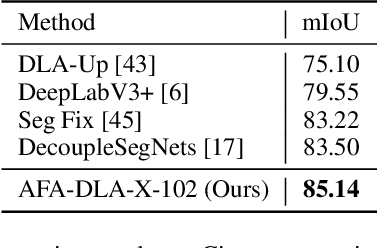
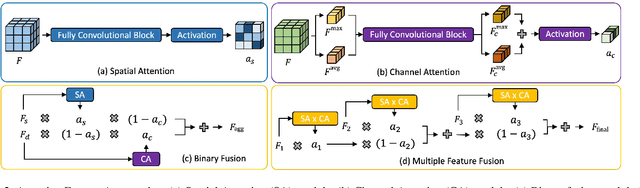
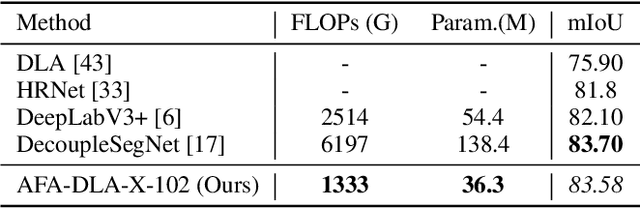
Aggregating information from features across different layers is an essential operation for dense prediction models. Despite its limited expressiveness, feature concatenation dominates the choice of aggregation operations. In this paper, we introduce Attentive Feature Aggregation (AFA) to fuse different network layers with more expressive non-linear operations. AFA exploits both spatial and channel attention to compute weighted average of the layer activations. Inspired by neural volume rendering, we extend AFA with Scale-Space Rendering (SSR) to perform late fusion of multi-scale predictions. AFA is applicable to a wide range of existing network designs. Our experiments show consistent and significant improvements on challenging semantic segmentation benchmarks, including Cityscapes, BDD100K, and Mapillary Vistas, at negligible computational and parameter overhead. In particular, AFA improves the performance of the Deep Layer Aggregation (DLA) model by nearly 6% mIoU on Cityscapes. Our experimental analyses show that AFA learns to progressively refine segmentation maps and to improve boundary details, leading to new state-of-the-art results on boundary detection benchmarks on BSDS500 and NYUDv2. Code and video resources are available at http://vis.xyz/pub/dla-afa.
TADA: Taxonomy Adaptive Domain Adaptation
Sep 10, 2021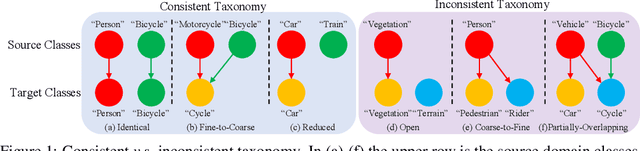
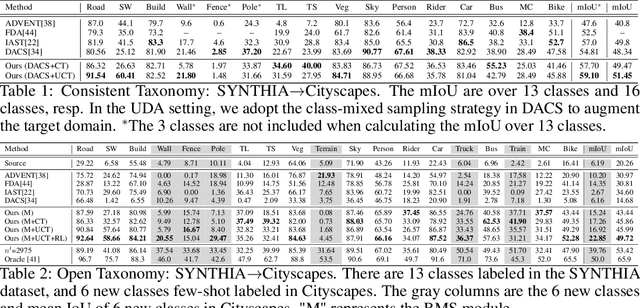
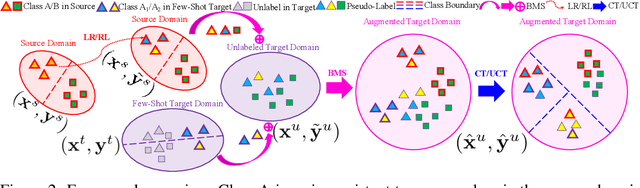
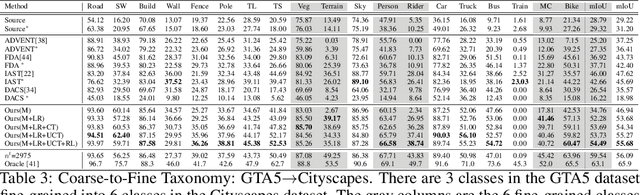
Traditional domain adaptation addresses the task of adapting a model to a novel target domain under limited or no additional supervision. While tackling the input domain gap, the standard domain adaptation settings assume no domain change in the output space. In semantic prediction tasks, different datasets are often labeled according to different semantic taxonomies. In many real-world settings, the target domain task requires a different taxonomy than the one imposed by the source domain. We therefore introduce the more general taxonomy adaptive domain adaptation (TADA) problem, allowing for inconsistent taxonomies between the two domains. We further propose an approach that jointly addresses the image-level and label-level domain adaptation. On the label-level, we employ a bilateral mixed sampling strategy to augment the target domain, and a relabelling method to unify and align the label spaces. We address the image-level domain gap by proposing an uncertainty-rectified contrastive learning method, leading to more domain-invariant and class discriminative features. We extensively evaluate the effectiveness of our framework under different TADA settings: open taxonomy, coarse-to-fine taxonomy, and partially-overlapping taxonomy. Our framework outperforms previous state-of-the-art by a large margin, while capable of adapting to new target domain taxonomies.
End-to-End Urban Driving by Imitating a Reinforcement Learning Coach
Aug 26, 2021End-to-end approaches to autonomous driving commonly rely on expert demonstrations. Although humans are good drivers, they are not good coaches for end-to-end algorithms that demand dense on-policy supervision. On the contrary, automated experts that leverage privileged information can efficiently generate large scale on-policy and off-policy demonstrations. However, existing automated experts for urban driving make heavy use of hand-crafted rules and perform suboptimally even on driving simulators, where ground-truth information is available. To address these issues, we train a reinforcement learning expert that maps bird's-eye view images to continuous low-level actions. While setting a new performance upper-bound on CARLA, our expert is also a better coach that provides informative supervision signals for imitation learning agents to learn from. Supervised by our reinforcement learning coach, a baseline end-to-end agent with monocular camera-input achieves expert-level performance. Our end-to-end agent achieves a 78% success rate while generalizing to a new town and new weather on the NoCrash-dense benchmark and state-of-the-art performance on the more challenging CARLA LeaderBoard.
Deep Reparametrization of Multi-Frame Super-Resolution and Denoising
Aug 18, 2021
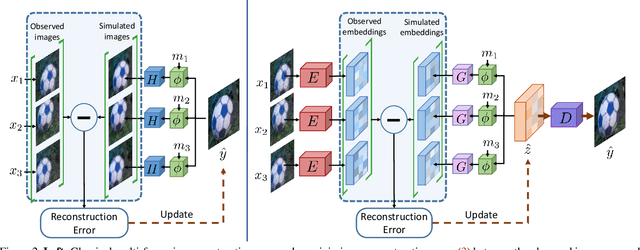

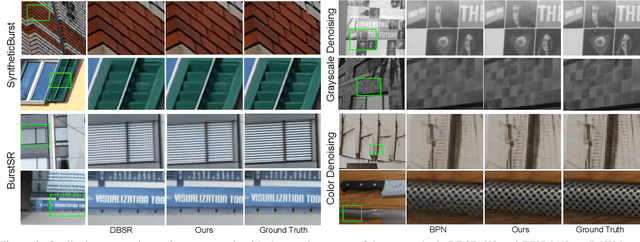
We propose a deep reparametrization of the maximum a posteriori formulation commonly employed in multi-frame image restoration tasks. Our approach is derived by introducing a learned error metric and a latent representation of the target image, which transforms the MAP objective to a deep feature space. The deep reparametrization allows us to directly model the image formation process in the latent space, and to integrate learned image priors into the prediction. Our approach thereby leverages the advantages of deep learning, while also benefiting from the principled multi-frame fusion provided by the classical MAP formulation. We validate our approach through comprehensive experiments on burst denoising and burst super-resolution datasets. Our approach sets a new state-of-the-art for both tasks, demonstrating the generality and effectiveness of the proposed formulation.
On the Practicality of Deterministic Epistemic Uncertainty
Jul 13, 2021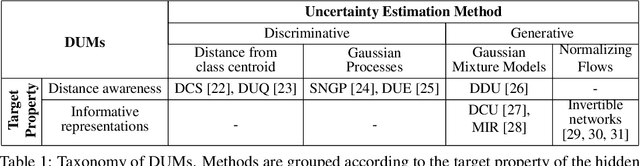
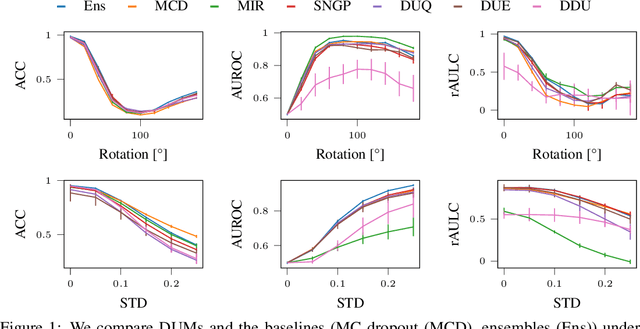
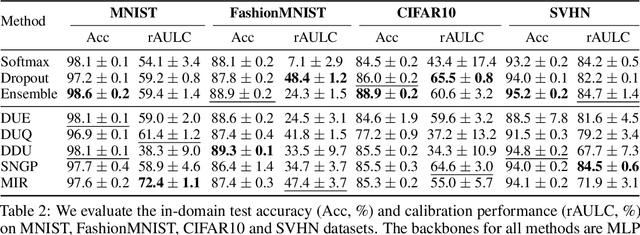
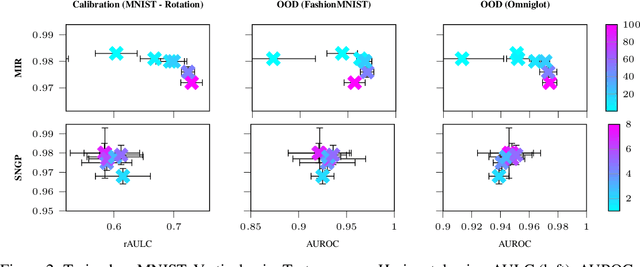
A set of novel approaches for estimating epistemic uncertainty in deep neural networks with a single forward pass has recently emerged as a valid alternative to Bayesian Neural Networks. On the premise of informative representations, these deterministic uncertainty methods (DUMs) achieve strong performance on detecting out-of-distribution (OOD) data while adding negligible computational costs at inference time. However, it remains unclear whether DUMs are well calibrated and can seamlessly scale to real-world applications - both prerequisites for their practical deployment. To this end, we first provide a taxonomy of DUMs, evaluate their calibration under continuous distributional shifts and their performance on OOD detection for image classification tasks. Then, we extend the most promising approaches to semantic segmentation. We find that, while DUMs scale to realistic vision tasks and perform well on OOD detection, the practicality of current methods is undermined by poor calibration under realistic distributional shifts.
Prototypical Cross-Attention Networks for Multiple Object Tracking and Segmentation
Jun 22, 2021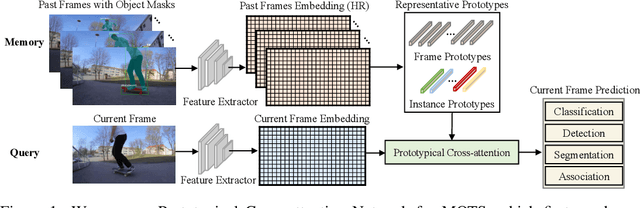
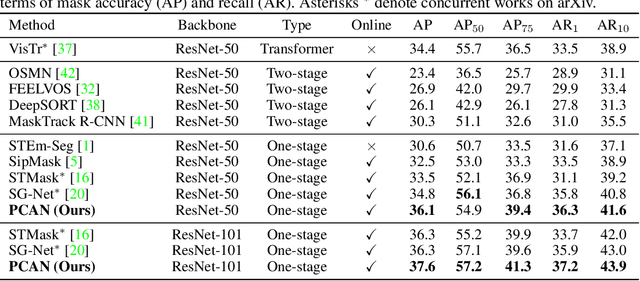
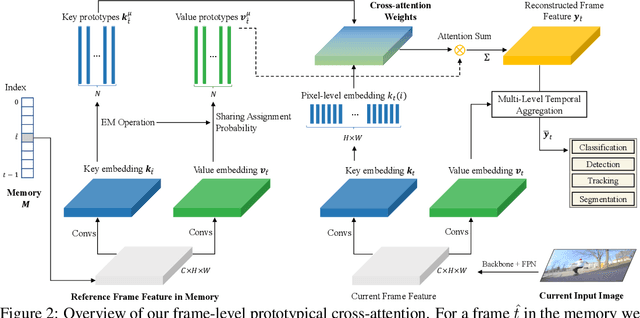
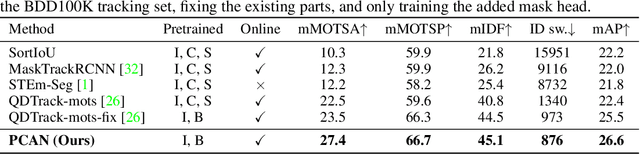
Multiple object tracking and segmentation requires detecting, tracking, and segmenting objects belonging to a set of given classes. Most approaches only exploit the temporal dimension to address the association problem, while relying on single frame predictions for the segmentation mask itself. We propose Prototypical Cross-Attention Network (PCAN), capable of leveraging rich spatio-temporal information for online multiple object tracking and segmentation. PCAN first distills a space-time memory into a set of prototypes and then employs cross-attention to retrieve rich information from the past frames. To segment each object, PCAN adopts a prototypical appearance module to learn a set of contrastive foreground and background prototypes, which are then propagated over time. Extensive experiments demonstrate that PCAN outperforms current video instance tracking and segmentation competition winners on both Youtube-VIS and BDD100K datasets, and shows efficacy to both one-stage and two-stage segmentation frameworks. Code will be available at http://vis.xyz/pub/pcan.
Robust Object Detection via Instance-Level Temporal Cycle Confusion
Apr 16, 2021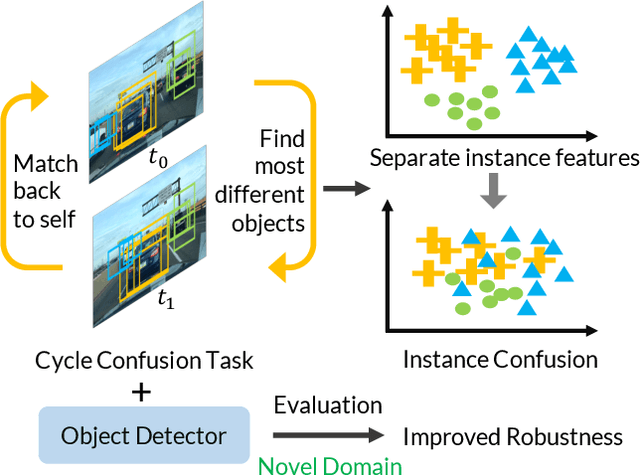
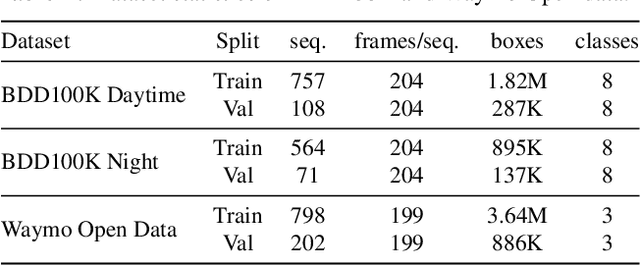
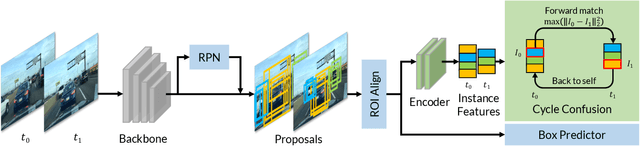
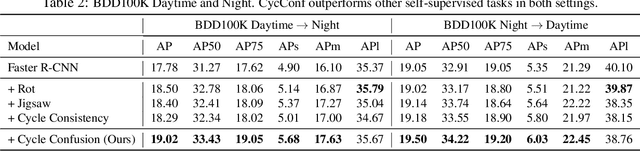
Building reliable object detectors that are robust to domain shifts, such as various changes in context, viewpoint, and object appearances, is critical for real-world applications. In this work, we study the effectiveness of auxiliary self-supervised tasks to improve the out-of-distribution generalization of object detectors. Inspired by the principle of maximum entropy, we introduce a novel self-supervised task, instance-level temporal cycle confusion (CycConf), which operates on the region features of the object detectors. For each object, the task is to find the most different object proposals in the adjacent frame in a video and then cycle back to itself for self-supervision. CycConf encourages the object detector to explore invariant structures across instances under various motions, which leads to improved model robustness in unseen domains at test time. We observe consistent out-of-domain performance improvements when training object detectors in tandem with self-supervised tasks on large-scale video datasets (BDD100K and Waymo open data). The joint training framework also establishes a new state-of-the-art on standard unsupervised domain adaptative detection benchmarks (Cityscapes, Foggy Cityscapes, and Sim10K). The project page is available at https://xinw.ai/cyc-conf.
Warp Consistency for Unsupervised Learning of Dense Correspondences
Apr 08, 2021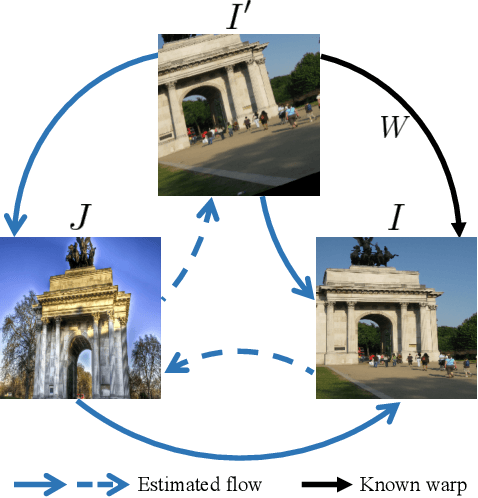
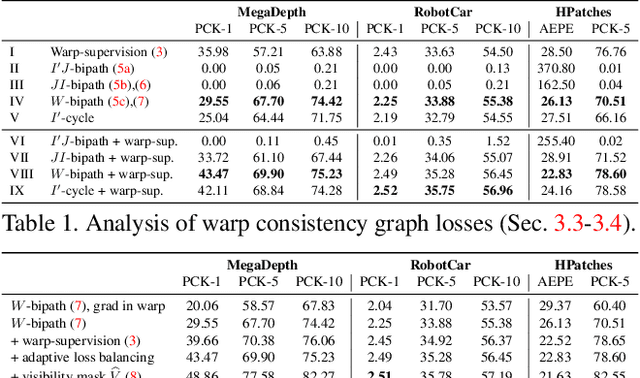
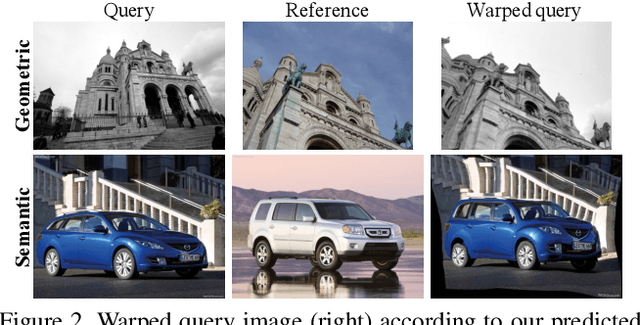
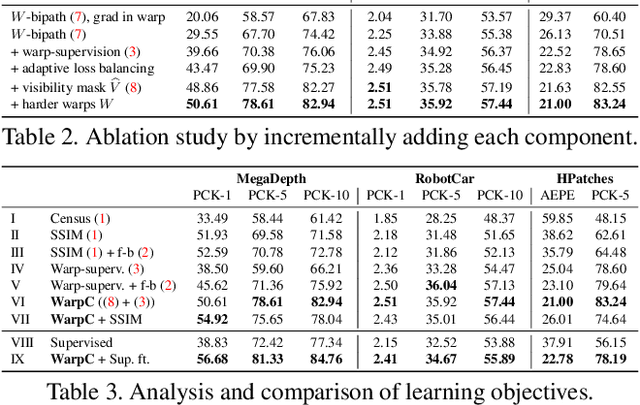
The key challenge in learning dense correspondences lies in the lack of ground-truth matches for real image pairs. While photometric consistency losses provide unsupervised alternatives, they struggle with large appearance changes, which are ubiquitous in geometric and semantic matching tasks. Moreover, methods relying on synthetic training pairs often suffer from poor generalisation to real data. We propose Warp Consistency, an unsupervised learning objective for dense correspondence regression. Our objective is effective even in settings with large appearance and view-point changes. Given a pair of real images, we first construct an image triplet by applying a randomly sampled warp to one of the original images. We derive and analyze all flow-consistency constraints arising between the triplet. From our observations and empirical results, we design a general unsupervised objective employing two of the derived constraints. We validate our warp consistency loss by training three recent dense correspondence networks for the geometric and semantic matching tasks. Our approach sets a new state-of-the-art on several challenging benchmarks, including MegaDepth, RobotCar and TSS. Code and models will be released at https://github.com/PruneTruong/DenseMatching.