 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Vision Tasks with Simple Photoreceptors Instead of Cameras
Jun 17, 2024A de facto standard in solving computer vision problems is to use a common high-resolution camera and choose its placement on an agent (i.e., position and orientation) based on human intuition. On the other hand, extremely simple and well-designed visual sensors found throughout nature allow many organisms to perform diverse, complex behaviors. In this work, motivated by these examples, we raise the following questions: 1. How effective simple visual sensors are in solving vision tasks? 2. What role does their design play in their effectiveness? We explore simple sensors with resolutions as low as one-by-one pixel, representing a single photoreceptor First, we demonstrate that just a few photoreceptors can be enough to solve many tasks, such as visual navigation and continuous control, reasonably well, with performance comparable to that of a high-resolution camera. Second, we show that the design of these simple visual sensors plays a crucial role in their ability to provide useful information and successfully solve these tasks. To find a well-performing design, we present a computational design optimization algorithm and evaluate its effectiveness across different tasks and domains, showing promising results. Finally, we perform a human survey to evaluate the effectiveness of intuitive designs devised manually by humans, showing that the computationally found design is among the best designs in most cases.
Sim-to-Real of Soft Robots with Learned Residual Physics
Feb 02, 2024Accurately modeling soft robots in simulation is computationally expensive and commonly falls short of representing the real world. This well-known discrepancy, known as the sim-to-real gap, can have several causes, such as coarsely approximated geometry and material models, manufacturing defects, viscoelasticity and plasticity, and hysteresis effects. Residual physics networks learn from real-world data to augment a discrepant model and bring it closer to reality. Here, we present a residual physics method for modeling soft robots with large degrees of freedom. We train neural networks to learn a residual term -- the modeling error between simulated and physical systems. Concretely, the residual term is a force applied on the whole simulated mesh, while real position data is collected with only sparse motion markers. The physical prior of the analytical simulation provides a starting point for the residual network, and the combined model is more informed than if physics were learned tabula rasa. We demonstrate our method on 1) a silicone elastomeric beam and 2) a soft pneumatic arm with hard-to-model, anisotropic fiber reinforcements. Our method outperforms traditional system identification up to 60%. We show that residual physics need not be limited to low degrees of freedom but can effectively bridge the sim-to-real gap for high dimensional systems.
DiffuseBot: Breeding Soft Robots With Physics-Augmented Generative Diffusion Models
Nov 28, 2023



Nature evolves creatures with a high complexity of morphological and behavioral intelligence, meanwhile computational methods lag in approaching that diversity and efficacy. Co-optimization of artificial creatures' morphology and control in silico shows promise for applications in physical soft robotics and virtual character creation; such approaches, however, require developing new learning algorithms that can reason about function atop pure structure. In this paper, we present DiffuseBot, a physics-augmented diffusion model that generates soft robot morphologies capable of excelling in a wide spectrum of tasks. DiffuseBot bridges the gap between virtually generated content and physical utility by (i) augmenting the diffusion process with a physical dynamical simulation which provides a certificate of performance, and (ii) introducing a co-design procedure that jointly optimizes physical design and control by leveraging information about physical sensitivities from differentiable simulation. We showcase a range of simulated and fabricated robots along with their capabilities. Check our website at https://diffusebot.github.io/
Differentiable Visual Computing for Inverse Problems and Machine Learning
Nov 21, 2023Originally designed for applications in computer graphics, visual computing (VC) methods synthesize information about physical and virtual worlds, using prescribed algorithms optimized for spatial computing. VC is used to analyze geometry, physically simulate solids, fluids, and other media, and render the world via optical techniques. These fine-tuned computations that operate explicitly on a given input solve so-called forward problems, VC excels at. By contrast, deep learning (DL) allows for the construction of general algorithmic models, side stepping the need for a purely first principles-based approach to problem solving. DL is powered by highly parameterized neural network architectures -- universal function approximators -- and gradient-based search algorithms which can efficiently search that large parameter space for optimal models. This approach is predicated by neural network differentiability, the requirement that analytic derivatives of a given problem's task metric can be computed with respect to neural network's parameters. Neural networks excel when an explicit model is not known, and neural network training solves an inverse problem in which a model is computed from data.
How Can Large Language Models Help Humans in Design and Manufacturing?
Jul 25, 2023The advancement of Large Language Models (LLMs), including GPT-4, provides exciting new opportunities for generative design. We investigate the application of this tool across the entire design and manufacturing workflow. Specifically, we scrutinize the utility of LLMs in tasks such as: converting a text-based prompt into a design specification, transforming a design into manufacturing instructions, producing a design space and design variations, computing the performance of a design, and searching for designs predicated on performance. Through a series of examples, we highlight both the benefits and the limitations of the current LLMs. By exposing these limitations, we aspire to catalyze the continued improvement and progression of these models.
Neural Fields with Hard Constraints of Arbitrary Differential Order
Jun 15, 2023



While deep learning techniques have become extremely popular for solving a broad range of optimization problems, methods to enforce hard constraints during optimization, particularly on deep neural networks, remain underdeveloped. Inspired by the rich literature on meshless interpolation and its extension to spectral collocation methods in scientific computing, we develop a series of approaches for enforcing hard constraints on neural fields, which we refer to as \emph{Constrained Neural Fields} (CNF). The constraints can be specified as a linear operator applied to the neural field and its derivatives. We also design specific model representations and training strategies for problems where standard models may encounter difficulties, such as conditioning of the system, memory consumption, and capacity of the network when being constrained. Our approaches are demonstrated in a wide range of real-world applications. Additionally, we develop a framework that enables highly efficient model and constraint specification, which can be readily applied to any downstream task where hard constraints need to be explicitly satisfied during optimization.
Efficient automatic design of robots
Jun 05, 2023Robots are notoriously difficult to design because of complex interdependencies between their physical structure, sensory and motor layouts, and behavior. Despite this, almost every detail of every robot built to date has been manually determined by a human designer after several months or years of iterative ideation, prototyping, and testing. Inspired by evolutionary design in nature, the automated design of robots using evolutionary algorithms has been attempted for two decades, but it too remains inefficient: days of supercomputing are required to design robots in simulation that, when manufactured, exhibit desired behavior. Here we show for the first time de-novo optimization of a robot's structure to exhibit a desired behavior, within seconds on a single consumer-grade computer, and the manufactured robot's retention of that behavior. Unlike other gradient-based robot design methods, this algorithm does not presuppose any particular anatomical form; starting instead from a randomly-generated apodous body plan, it consistently discovers legged locomotion, the most efficient known form of terrestrial movement. If combined with automated fabrication and scaled up to more challenging tasks, this advance promises near instantaneous design, manufacture, and deployment of unique and useful machines for medical, environmental, vehicular, and space-based tasks.
Zero-Shot Transfer of Haptics-Based Object Insertion Policies
Jan 31, 2023



Humans naturally exploit haptic feedback during contact-rich tasks like loading a dishwasher or stocking a bookshelf. Current robotic systems focus on avoiding unexpected contact, often relying on strategically placed environment sensors. Recently, contact-exploiting manipulation policies have been trained in simulation and deployed on real robots. However, they require some form of real-world adaptation to bridge the sim-to-real gap, which might not be feasible in all scenarios. In this paper we train a contact-exploiting manipulation policy in simulation for the contact-rich household task of loading plates into a slotted holder, which transfers without any fine-tuning to the real robot. We investigate various factors necessary for this zero-shot transfer, like time delay modeling, memory representation, and domain randomization. Our policy transfers with minimal sim-to-real gap and significantly outperforms heuristic and learnt baselines. It also generalizes to plates of different sizes and weights. Demonstration videos and code are available at https://sites.google.com/view/compliant-object-insertion.
Sim-to-Real for Soft Robots using Differentiable FEM: Recipes for Meshing, Damping, and Actuation
Feb 17, 2022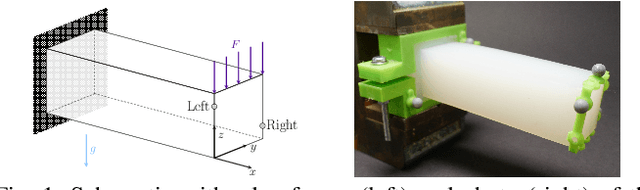
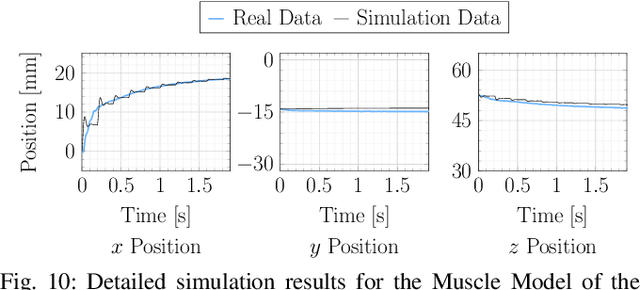
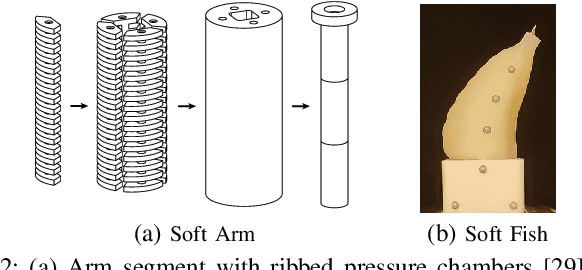
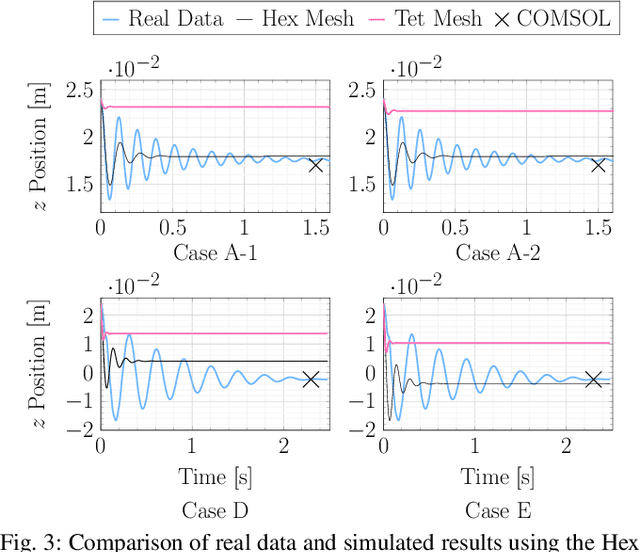
An accurate, physically-based, and differentiable model of soft robots can unlock downstream applications in optimal control. The Finite Element Method (FEM) is an expressive approach for modeling highly deformable structures such as dynamic, elastomeric soft robots. In this paper, we compare virtual robot models simulated using differentiable FEM with measurements from their physical counterparts. In particular, we examine several soft structures with different morphologies: a clamped soft beam under external force, a pneumatically actuated soft robotic arm, and a soft robotic fish tail. We benchmark and analyze different meshing resolutions and elements (tetrahedra and hexahedra), numerical damping, and the efficacy of differentiability for parameter calibration using a simulator based on the fast Differentiable Projective Dynamics (DiffPD). We also advance FEM modeling in application to soft robotics by proposing a predictive model for pneumatic soft robotic actuation. Through our recipes and case studies, we provide strategies and algorithms for matching real-world physics in simulation, making FEM useful for soft robots
Multi-Objective Graph Heuristic Search for Terrestrial Robot Design
Jul 13, 2021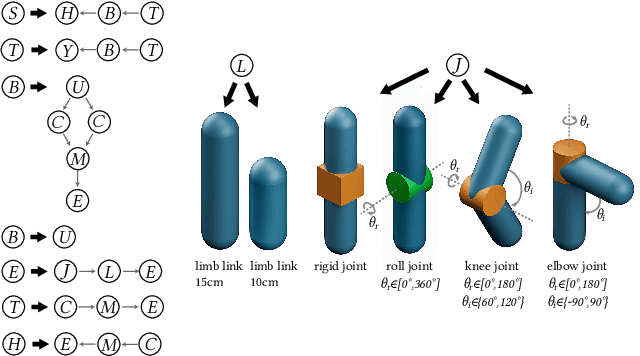
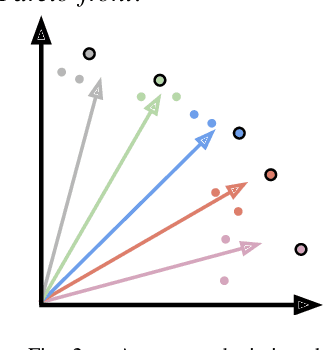
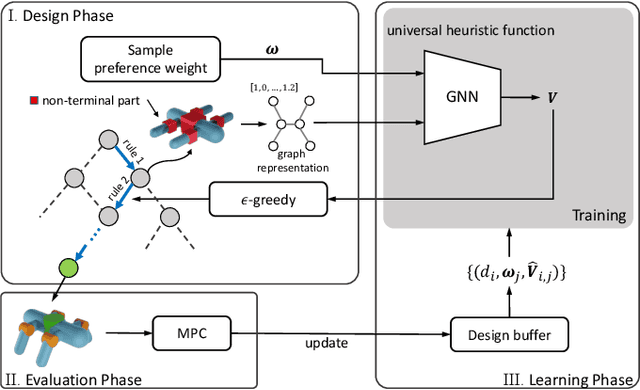
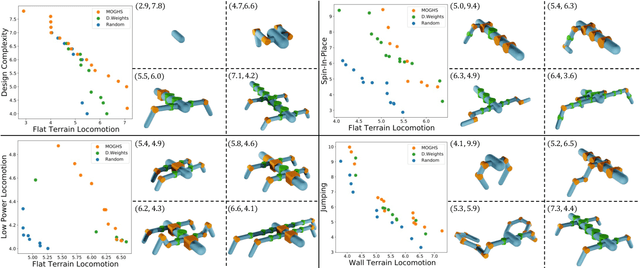
We present methods for co-designing rigid robots over control and morphology (including discrete topology) over multiple objectives. Previous work has addressed problems in single-objective robot co-design or multi-objective control. However, the joint multi-objective co-design problem is extremely important for generating capable, versatile, algorithmically designed robots. In this work, we present Multi-Objective Graph Heuristic Search, which extends a single-objective graph heuristic search from previous work to enable a highly efficient multi-objective search in a combinatorial design topology space. Core to this approach, we introduce a new universal, multi-objective heuristic function based on graph neural networks that is able to effectively leverage learned information between different task trade-offs. We demonstrate our approach on six combinations of seven terrestrial locomotion and design tasks, including one three-objective example. We compare the captured Pareto fronts across different methods and demonstrate that our multi-objective graph heuristic search quantitatively and qualitatively outperforms other techniques.