 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning, Solving and Optimizing PDEs with TensorGalerkin: an efficient high-performance Galerkin assembly algorithm
Feb 04, 2026We present a unified algorithmic framework for the numerical solution, constrained optimization, and physics-informed learning of PDEs with a variational structure. Our framework is based on a Galerkin discretization of the underlying variational forms, and its high efficiency stems from a novel highly-optimized and GPU-compliant TensorGalerkin framework for linear system assembly (stiffness matrices and load vectors). TensorGalerkin operates by tensorizing element-wise operations within a Python-level Map stage and then performs global reduction with a sparse matrix multiplication that performs message passing on the mesh-induced sparsity graph. It can be seamlessly employed downstream as i) a highly-efficient numerical PDEs solver, ii) an end-to-end differentiable framework for PDE-constrained optimization, and iii) a physics-informed operator learning algorithm for PDEs. With multiple benchmarks, including 2D and 3D elliptic, parabolic, and hyperbolic PDEs on unstructured meshes, we demonstrate that the proposed framework provides significant computational efficiency and accuracy gains over a variety of baselines in all the targeted downstream applications.
Sim-to-Real of Soft Robots with Learned Residual Physics
Feb 02, 2024Accurately modeling soft robots in simulation is computationally expensive and commonly falls short of representing the real world. This well-known discrepancy, known as the sim-to-real gap, can have several causes, such as coarsely approximated geometry and material models, manufacturing defects, viscoelasticity and plasticity, and hysteresis effects. Residual physics networks learn from real-world data to augment a discrepant model and bring it closer to reality. Here, we present a residual physics method for modeling soft robots with large degrees of freedom. We train neural networks to learn a residual term -- the modeling error between simulated and physical systems. Concretely, the residual term is a force applied on the whole simulated mesh, while real position data is collected with only sparse motion markers. The physical prior of the analytical simulation provides a starting point for the residual network, and the combined model is more informed than if physics were learned tabula rasa. We demonstrate our method on 1) a silicone elastomeric beam and 2) a soft pneumatic arm with hard-to-model, anisotropic fiber reinforcements. Our method outperforms traditional system identification up to 60%. We show that residual physics need not be limited to low degrees of freedom but can effectively bridge the sim-to-real gap for high dimensional systems.
Real Robot Challenge 2022: Learning Dexterous Manipulation from Offline Data in the Real World
Sep 04, 2023Experimentation on real robots is demanding in terms of time and costs. For this reason, a large part of the reinforcement learning (RL) community uses simulators to develop and benchmark algorithms. However, insights gained in simulation do not necessarily translate to real robots, in particular for tasks involving complex interactions with the environment. The Real Robot Challenge 2022 therefore served as a bridge between the RL and robotics communities by allowing participants to experiment remotely with a real robot - as easily as in simulation. In the last years, offline reinforcement learning has matured into a promising paradigm for learning from pre-collected datasets, alleviating the reliance on expensive online interactions. We therefore asked the participants to learn two dexterous manipulation tasks involving pushing, grasping, and in-hand orientation from provided real-robot datasets. An extensive software documentation and an initial stage based on a simulation of the real set-up made the competition particularly accessible. By giving each team plenty of access budget to evaluate their offline-learned policies on a cluster of seven identical real TriFinger platforms, we organized an exciting competition for machine learners and roboticists alike. In this work we state the rules of the competition, present the methods used by the winning teams and compare their results with a benchmark of state-of-the-art offline RL algorithms on the challenge datasets.
On Linear Interpolation in the Latent Space of Deep Generative Models
May 08, 2021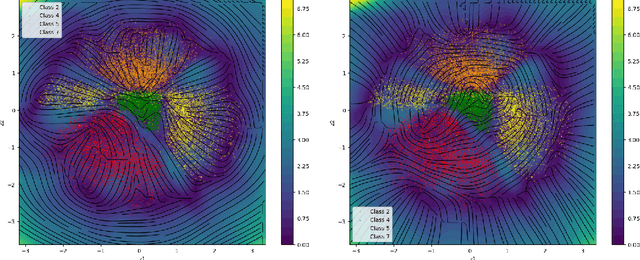
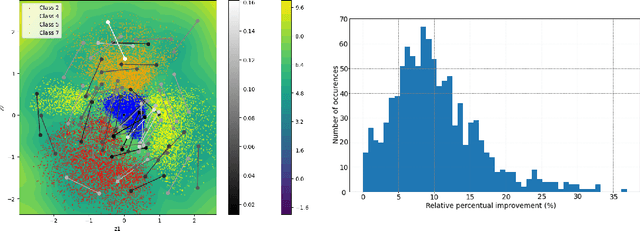

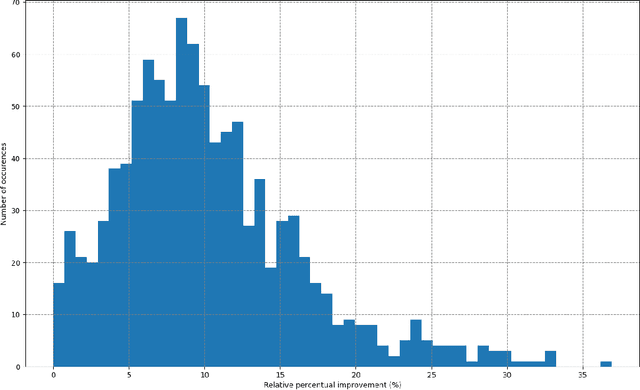
The underlying geometrical structure of the latent space in deep generative models is in most cases not Euclidean, which may lead to biases when comparing interpolation capabilities of two models. Smoothness and plausibility of linear interpolations in latent space are associated with the quality of the underlying generative model. In this paper, we show that not all such interpolations are comparable as they can deviate arbitrarily from the shortest interpolation curve given by the geodesic. This deviation is revealed by computing curve lengths with the pull-back metric of the generative model, finding shorter curves than the straight line between endpoints, and measuring a non-zero relative length improvement on this straight line. This leads to a strategy to compare linear interpolations across two generative models. We also show the effect and importance of choosing an appropriate output space for computing shorter curves. For this computation we derive an extension of the pull-back metric.