 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Architectures for Kolmogorov-Arnold Networks
Dec 13, 2025



Efforts to improve Kolmogorov-Arnold networks (KANs) with architectural enhancements have been stymied by the complexity those enhancements bring, undermining the interpretability that makes KANs attractive in the first place. Here we study overprovisioned architectures combined with sparsification to learn compact, interpretable KANs without sacrificing accuracy. Crucially, we focus on differentiable sparsification, turning architecture search into an end-to-end optimization problem. Across function approximation benchmarks, dynamical systems forecasting, and real-world prediction tasks, we demonstrate competitive or superior accuracy while discovering substantially smaller models. Overprovisioning and sparsification are synergistic, with the combination outperforming either alone. The result is a principled path toward models that are both more expressive and more interpretable, addressing a key tension in scientific machine learning.
LaSER: How Learning Can Guide the Evolution of Equations
May 22, 2025



Evolution and learning are two distinct yet complementary forms of adaptation. While evolutionary processes operate across generations via the selection of genotypes, learning occurs within the lifetime of an individual, shaping behavior through phenotypic adjustment. The Baldwin effect describes how lifetime learning can improve evolutionary search without altering inherited structures. While this has proven effective in areas like neuroevolution, where gradient-based learning is often used to fine-tune weights or behaviors produced by evolution, it remains underexplored in systems that evolve non-differentiable symbolic structures like Genetic Programming (GP). GP evolves explicit syntax trees that represent equations, offering strong interpretability but limited generalization due to the burden of discovering both useful representations and precise mappings. Here, we show for the first time that integrating a simple form of supervised learning, applied at the semantic or behavioral level during evaluation, can effectively guide the evolution of equations in GP. To achieve this, we propose a new GP pipeline, LaSER (Latent Semantic Evolutionary Regression), where each GP individual generates a semantic representation that is passed to a supervised learner. The quality of the learned mapping is used to assign fitness, without modifying the underlying syntax tree or evolutionary process. Across standard symbolic regression benchmarks, in terms of generalization ability, LaSER significantly outperforms traditional GP and, in several cases, matches or exceeds popular machine learning regressors, while preserving the symbolic interpretability. By separating evolution from learning, LaSER offers a practical route to integrating GP with modern ML workflows, and opens new avenues for research at the intersection of evolutionary computation and representation learning.
Giving Simulated Cells a Voice: Evolving Prompt-to-Intervention Models for Cellular Control
May 05, 2025



Guiding biological systems toward desired states, such as morphogenetic outcomes, remains a fundamental challenge with far-reaching implications for medicine and synthetic biology. While large language models (LLMs) have enabled natural language as an interface for interpretable control in AI systems, their use as mediators for steering biological or cellular dynamics remains largely unexplored. In this work, we present a functional pipeline that translates natural language prompts into spatial vector fields capable of directing simulated cellular collectives. Our approach combines a large language model with an evolvable neural controller (Prompt-to-Intervention, or P2I), optimized via evolutionary strategies to generate behaviors such as clustering or scattering in a simulated 2D environment. We demonstrate that even with constrained vocabulary and simplified cell models, evolved P2I networks can successfully align cellular dynamics with user-defined goals expressed in plain language. This work offers a complete loop from language input to simulated bioelectric-like intervention to behavioral output, providing a foundation for future systems capable of natural language-driven cellular control.
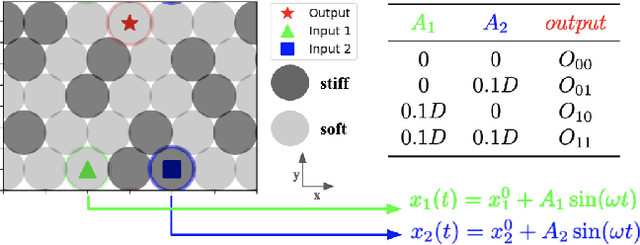
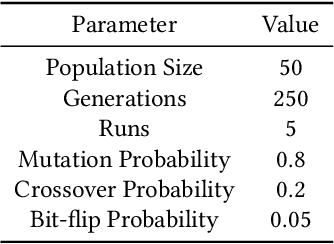
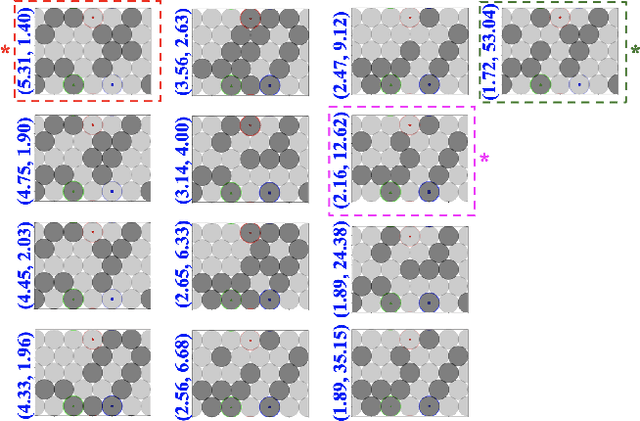
Gradient-based Design of Computational Granular Crystals
Apr 07, 2024There is growing interest in engineering unconventional computing devices that leverage the intrinsic dynamics of physical substrates to perform fast and energy-efficient computations. Granular metamaterials are one such substrate that has emerged as a promising platform for building wave-based information processing devices with the potential to integrate sensing, actuation, and computation. Their high-dimensional and nonlinear dynamics result in nontrivial and sometimes counter-intuitive wave responses that can be shaped by the material properties, geometry, and configuration of individual grains. Such highly tunable rich dynamics can be utilized for mechanical computing in special-purpose applications. However, there are currently no general frameworks for the inverse design of large-scale granular materials. Here, we build upon the similarity between the spatiotemporal dynamics of wave propagation in material and the computational dynamics of Recurrent Neural Networks to develop a gradient-based optimization framework for harmonically driven granular crystals. We showcase how our framework can be utilized to design basic logic gates where mechanical vibrations carry the information at predetermined frequencies. We compare our design methodology with classic gradient-free methods and find that our approach discovers higher-performing configurations with less computational effort. Our findings show that a gradient-based optimization method can greatly expand the design space of metamaterials and provide the opportunity to systematically traverse the parameter space to find materials with the desired functionalities.
Efficient automatic design of robots
Jun 05, 2023Robots are notoriously difficult to design because of complex interdependencies between their physical structure, sensory and motor layouts, and behavior. Despite this, almost every detail of every robot built to date has been manually determined by a human designer after several months or years of iterative ideation, prototyping, and testing. Inspired by evolutionary design in nature, the automated design of robots using evolutionary algorithms has been attempted for two decades, but it too remains inefficient: days of supercomputing are required to design robots in simulation that, when manufactured, exhibit desired behavior. Here we show for the first time de-novo optimization of a robot's structure to exhibit a desired behavior, within seconds on a single consumer-grade computer, and the manufactured robot's retention of that behavior. Unlike other gradient-based robot design methods, this algorithm does not presuppose any particular anatomical form; starting instead from a randomly-generated apodous body plan, it consistently discovers legged locomotion, the most efficient known form of terrestrial movement. If combined with automated fabrication and scaled up to more challenging tasks, this advance promises near instantaneous design, manufacture, and deployment of unique and useful machines for medical, environmental, vehicular, and space-based tasks.
Universal Mechanical Polycomputation in Granular Matter
May 29, 2023Unconventional computing devices are increasingly of interest as they can operate in environments hostile to silicon-based electronics, or compute in ways that traditional electronics cannot. Mechanical computers, wherein information processing is a material property emerging from the interaction of components with the environment, are one such class of devices. This information processing can be manifested in various physical substrates, one of which is granular matter. In a granular assembly, vibration can be treated as the information-bearing mode. This can be exploited to realize "polycomputing": materials can be evolved such that a single grain within them can report the result of multiple logical operations simultaneously at different frequencies, without recourse to quantum effects. Here, we demonstrate the evolution of a material in which one grain acts simultaneously as two different NAND gates at two different frequencies. NAND gates are of interest as any logical operations can be built from them. Moreover, they are nonlinear thus demonstrating a step toward general-purpose, computationally dense mechanical computers. Polycomputation was found to be distributed across each evolved material, suggesting the material's robustness. With recent advances in material sciences, hardware realization of these materials may eventually provide devices that challenge the computational density of traditional computers.
Selection for short-term empowerment accelerates the evolution of homeostatic neural cellular automata
May 24, 2023



Empowerment -- a domain independent, information-theoretic metric -- has previously been shown to assist in the evolutionary search for neural cellular automata (NCA) capable of homeostasis when employed as a fitness function. In our previous study, we successfully extended empowerment, defined as maximum time-lagged mutual information between agents' actions and future sensations, to a distributed sensorimotor system embodied as an NCA. However, the time-delay between actions and their corresponding sensations was arbitrarily chosen. Here, we expand upon previous work by exploring how the time scale at which empowerment operates impacts its efficacy as an auxiliary objective to accelerate the discovery of homeostatic NCAs. We show that shorter time delays result in marked improvements over empowerment with longer delays, when compared to evolutionary selection only for homeostasis. Moreover, we evaluate stability and adaptability of evolved NCAs, both hallmarks of living systems that are of interest to replicate in artificial ones. We find that short-term empowered NCA are more stable and are capable of generalizing better to unseen homeostatic challenges. Taken together, these findings motivate the use of empowerment during the evolution of other artifacts, and suggest how it should be incorporated to accelerate evolution of desired behaviors for them. Source code for the experiments in this paper can be found at: https://github.com/caitlingrasso/empowered-nca-II.
Evolving Programmable Computational Metamaterials
Apr 19, 2022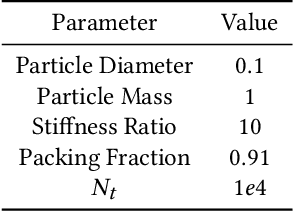
Granular metamaterials are a promising choice for the realization of mechanical computing devices. As preliminary evidence of this, we demonstrate here how to embed Boolean logic gates (AND and XOR) into a granular metamaterial by evolving where particular grains are placed in the material. Our results confirm the existence of gradients of increasing "AND-ness" and "XOR-ness" within the space of possible materials that can be followed by evolutionary search. We measure the computational functionality of a material by probing how it transforms bits encoded as vibrations with zero or non-zero amplitude. We compared the evolution of materials built from mass-contrasting particles and materials built from stiffness-contrasting particles, and found that the latter were more evolvable. We believe this work may pave the way toward evolutionary design of increasingly sophisticated, programmable, and computationally dense metamaterials with certain advantages over more traditional computational substrates.
Selecting Continuous Life-Like Cellular Automata for Halting Unpredictability: Evolving for Abiogenesis
Apr 15, 2022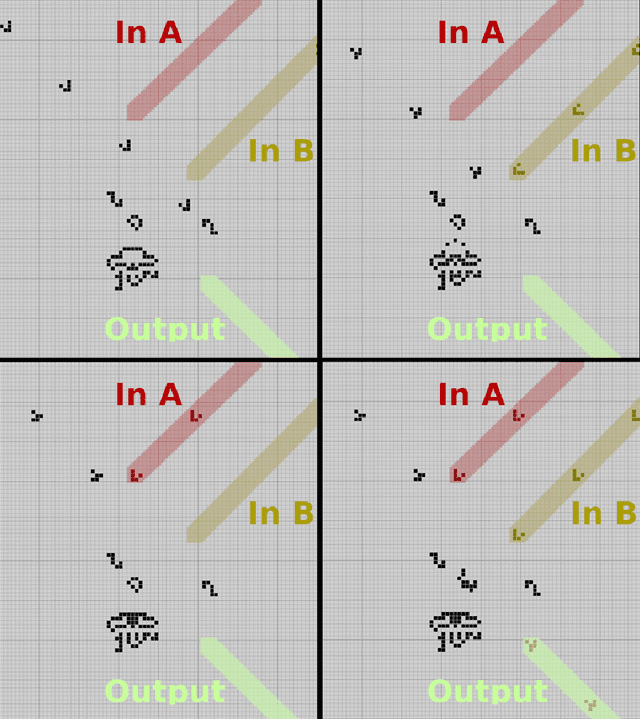
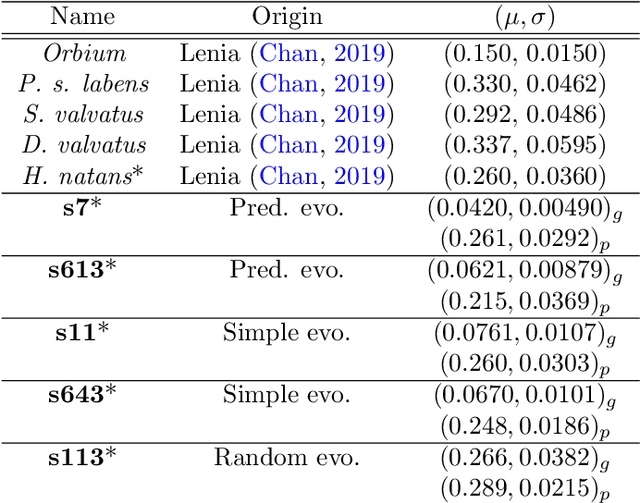
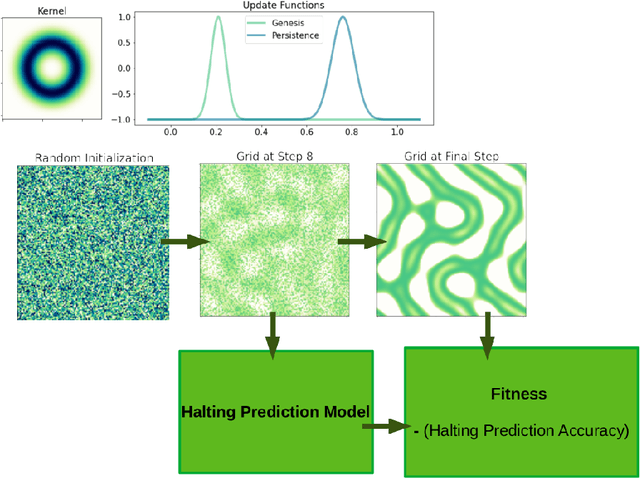
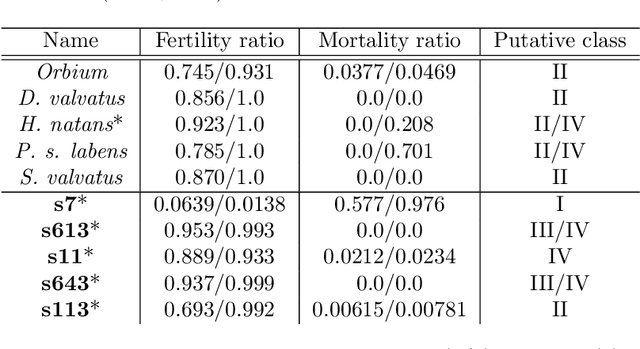
Substantial efforts have been applied to engineer CA with desired emergent properties, such as supporting gliders. Recent work in continuous CA has generated a wide variety of compelling bioreminescent patterns, and the expansion of CA research into continuous numbers, multiple channels, and higher dimensions complicates their study. In this work we devise a strategy for evolving CA and CA patterns in two steps, based on the simple idea that CA are likely to be complex and computationally capable if they support patterns that grow indefinitely as well as patterns that vanish completely, and are difficult to predict the difference in advance. The second part of our strategy evolves patterns by selecting for mobility and conservation of mean cell value. We validate our pattern evolution method by re-discovering gliders in 17 of 17 Lenia CA, and also report 5 new evolved CA that support evolved glider patterns, differing from previously reported Lenia patterns. The CA reported here share neighborhood kernels with previously described Lenia CA, but exhibit a wider range of typical dynamics than their Lenia counterparts. Code for evolving continuous CA is made available under an MIT License.
A good body is all you need: avoiding catastrophic interference via agent architecture search
Aug 20, 2021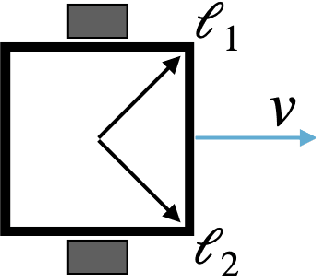
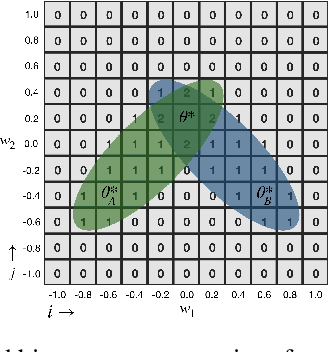
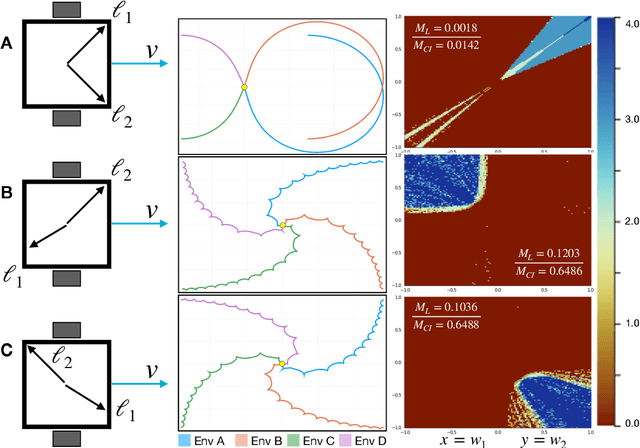
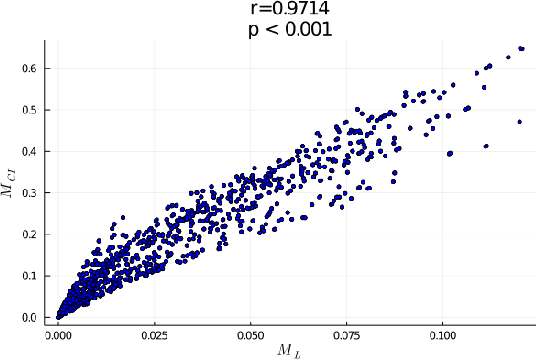
In robotics, catastrophic interference continues to restrain policy training across environments. Efforts to combat catastrophic interference to date focus on novel neural architectures or training methods, with a recent emphasis on policies with good initial settings that facilitate training in new environments. However, none of these methods to date have taken into account how the physical architecture of the robot can obstruct or facilitate catastrophic interference, just as the choice of neural architecture can. In previous work we have shown how aspects of a robot's physical structure (specifically, sensor placement) can facilitate policy learning by increasing the fraction of optimal policies for a given physical structure. Here we show for the first time that this proxy measure of catastrophic interference correlates with sample efficiency across several search methods, proving that favorable loss landscapes can be induced by the correct choice of physical structure. We show that such structures can be found via co-optimization -- optimization of a robot's structure and control policy simultaneously -- yielding catastrophic interference resistant robot structures and policies, and that this is more efficient than control policy optimization alone. Finally, we show that such structures exhibit sensor homeostasis across environments and introduce this as the mechanism by which certain robots overcome catastrophic interference.