 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified NMPC Scheme for MAVs Navigation with 3D Collision Avoidance under Position Uncertainty
Jul 31, 2020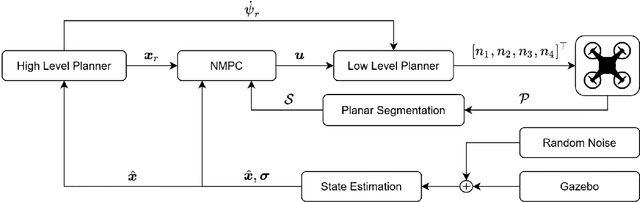
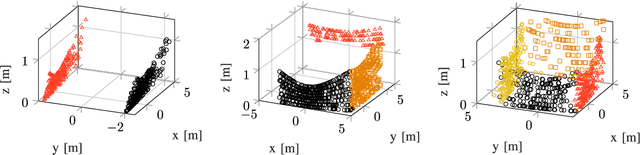
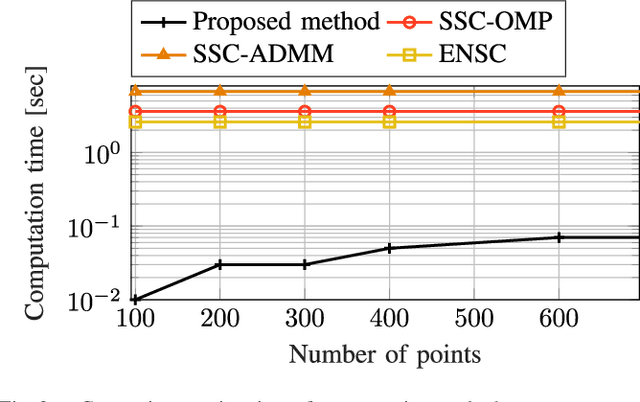
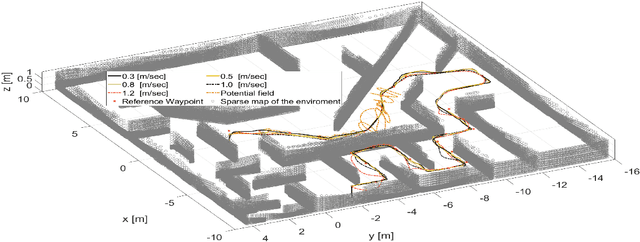
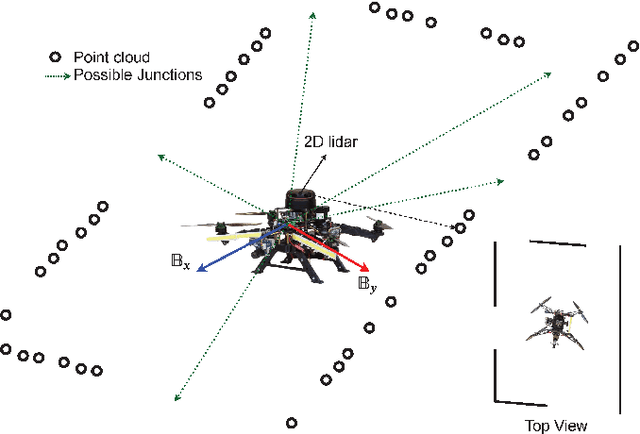
This article proposes a novel Nonlinear Model Predictive Control (NMPC) framework for Micro Aerial Vehicle (MAV) autonomous navigation in constrained environments. The introduced framework allows us to consider the nonlinear dynamics of MAVs and guarantees real-time performance. Our first contribution is to design a computationally efficient subspace clustering method to reveal from geometrical constraints to underlying constraint planes within a 3D point cloud, obtained from a 3D lidar scanner. The second contribution of our work is to incorporate the extracted information into the nonlinear constraints of NMPC for avoiding collisions. Our third contribution focuses on making the controller robust by considering the uncertainty of localization and NMPC using the Shannon entropy. This step enables us to track either the position or velocity references, or none of them if necessary. As a result, the collision avoidance constraints are defined in the local coordinates of MAVs and it remains active and guarantees collision avoidance, despite localization uncertainties, e.g., position estimation drifts. Additionally, as the platform continues the mission, this will result in less uncertain position estimations, due to the feature extraction and loop closure. The efficacy of the suggested framework has been evaluated using various simulations in the Gazebo environment.
Confidence-rich grid mapping
Jun 29, 2020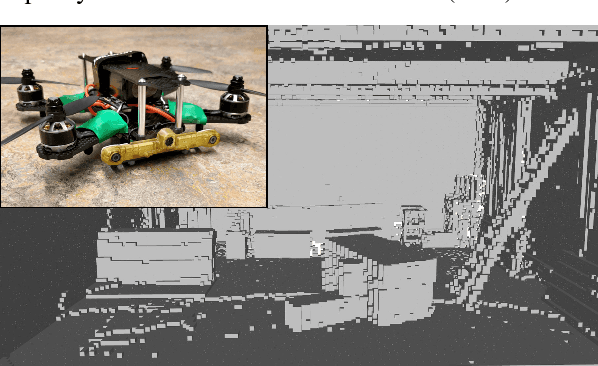
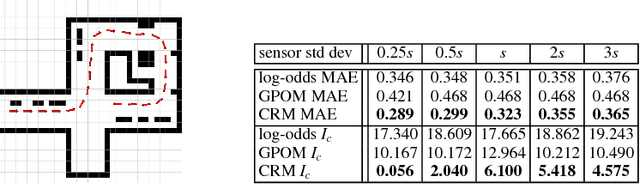
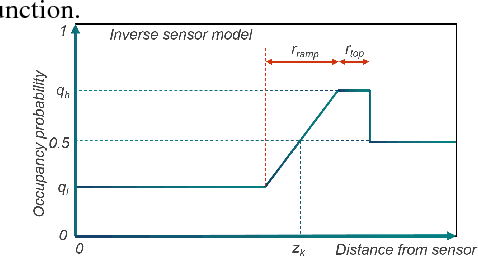
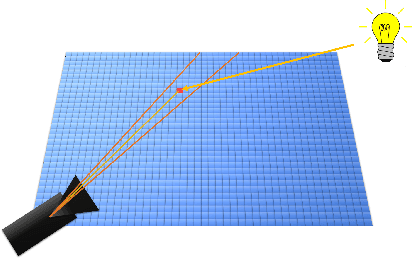
Representing the environment is a fundamental task in enabling robots to act autonomously in unknown environments. In this work, we present confidence-rich mapping (CRM), a new algorithm for spatial grid-based mapping of the 3D environment. CRM augments the occupancy level at each voxel by its confidence value. By explicitly storing and evolving confidence values using the CRM filter, CRM extends traditional grid mapping in three ways: first, it partially maintains the probabilistic dependence among voxels. Second, it relaxes the need for hand-engineering an inverse sensor model and proposes the concept of sensor cause model that can be derived in a principled manner from the forward sensor model. Third, and most importantly, it provides consistent confidence values over the occupancy estimation that can be reliably used in collision risk evaluation and motion planning. CRM runs online and enables mapping environments where voxels might be partially occupied. We demonstrate the performance of the method on various datasets and environments in simulation and on physical systems. We show in real-world experiments that, in addition to achieving maps that are more accurate than traditional methods, the proposed filtering scheme demonstrates a much higher level of consistency between its error and the reported confidence, hence, enabling a more reliable collision risk evaluation for motion planning.
* Published at International Journal of Robotics Research (IJRR) 2019 (https://journals.sagepub.com/doi/10.1177/0278364919839762)
Unsupervised Learning for Subterranean Junction Recognition Based on 2D Point Cloud
Jun 07, 2020
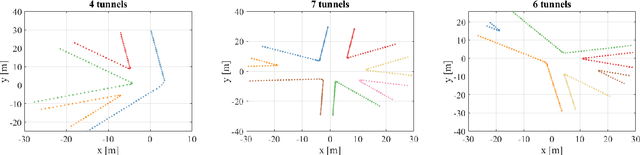

This article proposes a novel unsupervised learning framework for detecting the number of tunnel junctions in subterranean environments based on acquired 2D point clouds. The implementation of the framework provides valuable information for high level mission planners to navigate an aerial platform in unknown areas or robot homing missions. The framework utilizes spectral clustering, which is capable of uncovering hidden structures from connected data points lying on non-linear manifolds. The spectral clustering algorithm computes a spectral embedding of the original 2D point cloud by utilizing the eigen decomposition of a matrix that is derived from the pairwise similarities of these points. We validate the developed framework using multiple data-sets, collected from multiple realistic simulations, as well as from real flights in underground environments, demonstrating the performance and merits of the proposed methodology.
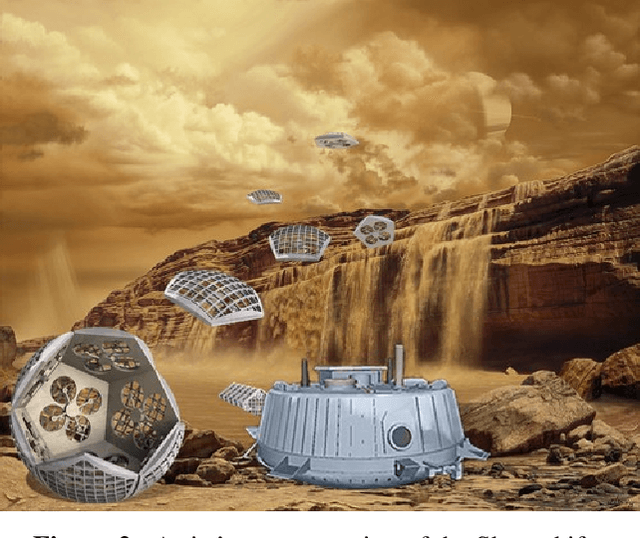
The Shapeshifter: a Morphing, Multi-Agent,Multi-Modal Robotic Platform for the Exploration of Titan
Mar 16, 2020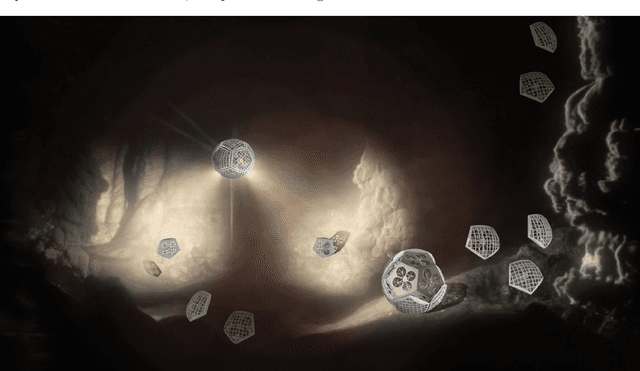
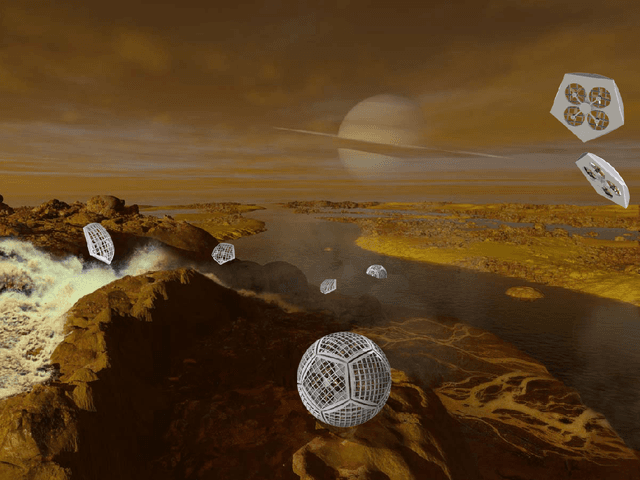
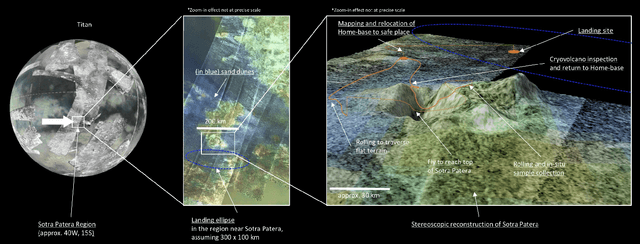
In this report for the Nasa NIAC Phase I study, we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. Our Phase I study had the objective of providing an initial assessment of the feasibility of the proposed robotic platform architecture, and in particular (a) to characterize the expected science return of a mission to the Sotra-Patera region on Titan; (b) to verify the mechanical and algorithmic feasibility of building a multi-agent platform capable of flying, docking, rolling and un-docking; (c) to evaluate the increased range and efficiency of rolling on Titan w.r.t to flying; (d) to define a case-study of a mission for the exploration of the cryovolcano Sotra-Patera on Titan, whose expected variety of geological features challenges conventional mobility platforms.
LAMP: Large-Scale Autonomous Mapping and Positioning for Exploration of Perceptually-Degraded Subterranean Environments
Mar 05, 2020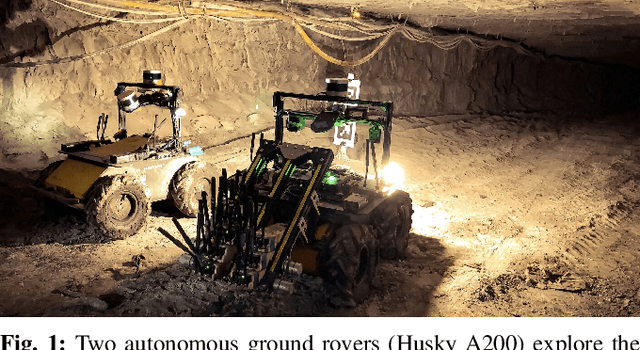
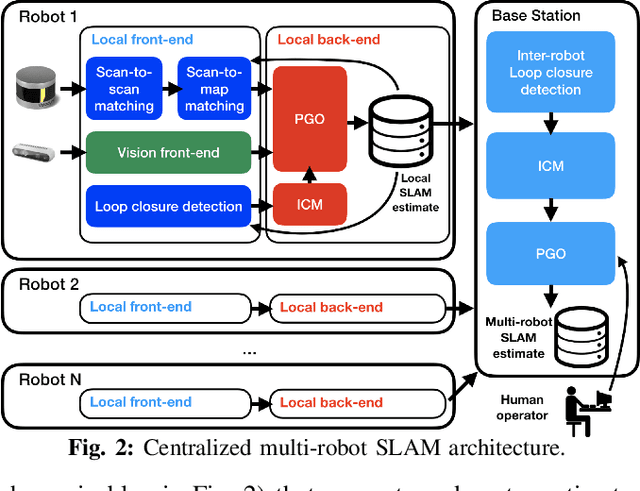
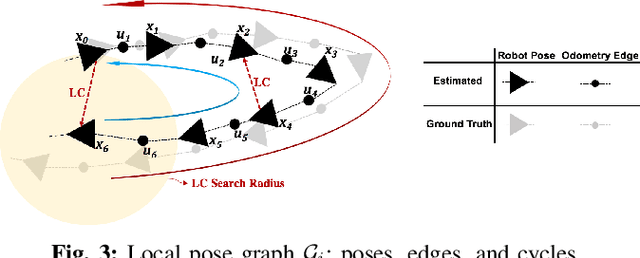
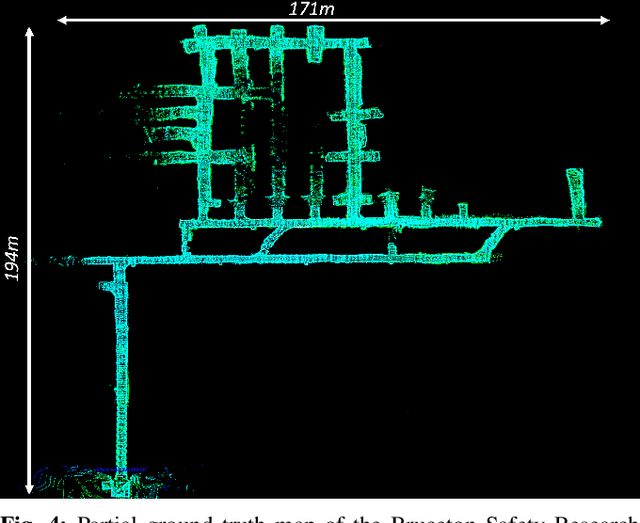
Simultaneous Localization and Mapping (SLAM) in large-scale, unknown, and complex subterranean environments is a challenging problem. Sensors must operate in off-nominal conditions; uneven and slippery terrains make wheel odometry inaccurate, while long corridors without salient features make exteroceptive sensing ambiguous and prone to drift; finally, spurious loop closures that are frequent in environments with repetitive appearance, such as tunnels and mines, could result in a significant distortion of the entire map. These challenges are in stark contrast with the need to build highly-accurate 3D maps to support a wide variety of applications, ranging from disaster response to the exploration of underground extraterrestrial worlds. This paper reports on the implementation and testing of a lidar-based multi-robot SLAM system developed in the context of the DARPA Subterranean Challenge. We present a system architecture to enhance subterranean operation, including an accurate lidar-based front-end, and a flexible and robust back-end that automatically rejects outlying loop closures. We present an extensive evaluation in large-scale, challenging subterranean environments, including the results obtained in the Tunnel Circuit of the DARPA Subterranean Challenge. Finally, we discuss potential improvements, limitations of the state of the art, and future research directions.
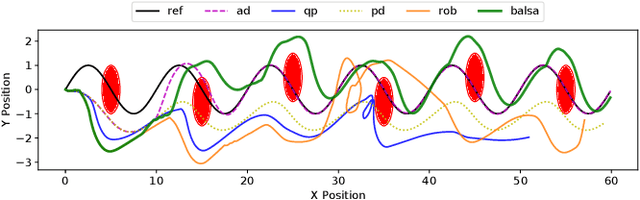
Deep Learning Tubes for Tube MPC
Feb 05, 2020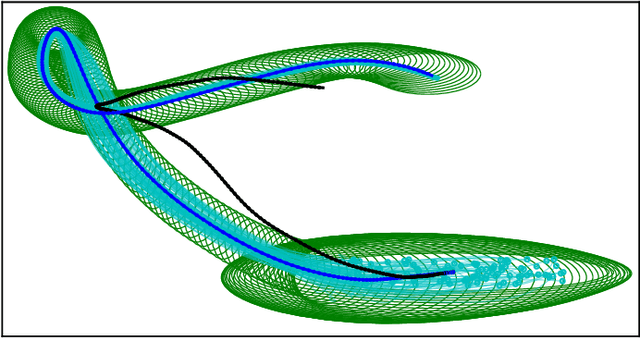
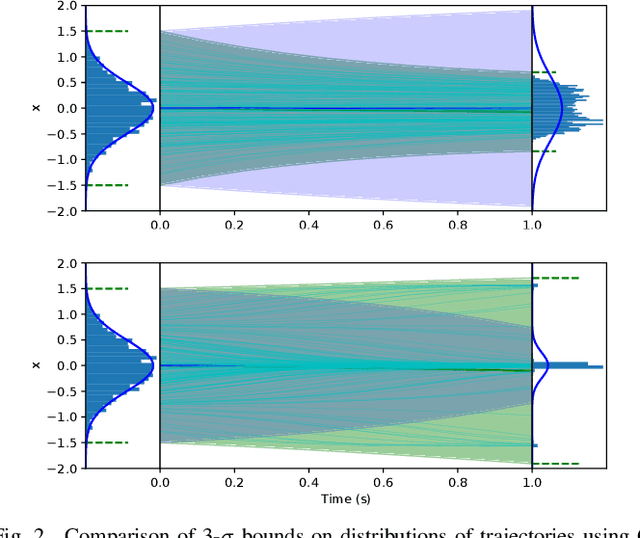
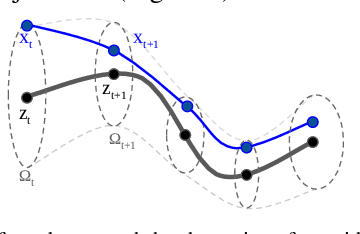
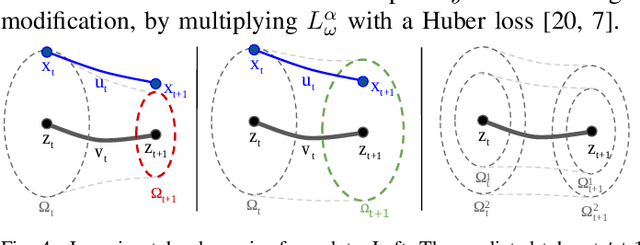
Learning-based control aims to construct models of a system to use for planning or trajectory optimization, e.g. in model-based reinforcement learning. In order to obtain guarantees of safety in this context, uncertainty must be accurately quantified. This uncertainty may come from errors in learning (due to a lack of data, for example), or may be inherent to the system. Propagating uncertainty in learned dynamics models is a difficult problem. Common approaches rely on restrictive assumptions of how distributions are parameterized or propagated in time. In contrast, in this work we propose using deep learning to obtain expressive and flexible models of how these distributions behave, which we then use for nonlinear Model Predictive Control (MPC). First, we introduce a deep quantile regression framework for control which enforces probabilistic quantile bounds and quantifies epistemic uncertainty. Next, using our method we explore three different approaches for learning tubes which contain the possible trajectories of the system, and demonstrate how to use each of them in a Tube MPC scheme. Furthermore, we prove these schemes are recursively feasible and satisfy constraints with a desired margin of probability. Finally, we present experiments in simulation on a nonlinear quadrotor system, demonstrating the practical efficacy of these ideas.
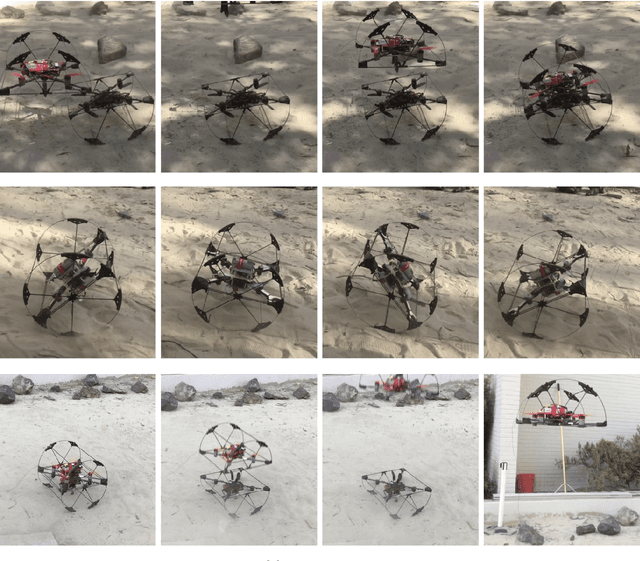
Shapeshifter: A Multi-Agent, Multi-Modal Robotic Platform for Exploration of Titan
Feb 03, 2020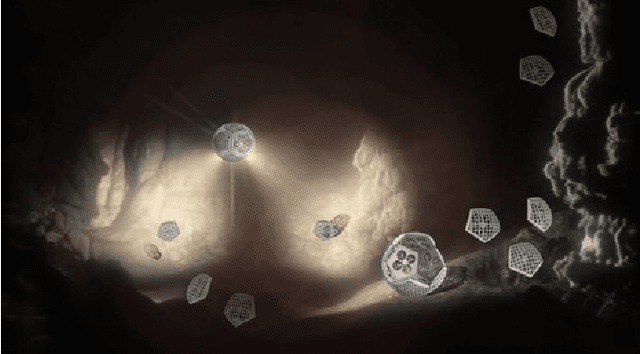
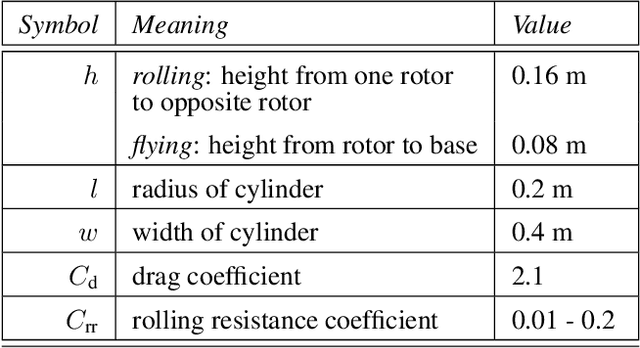
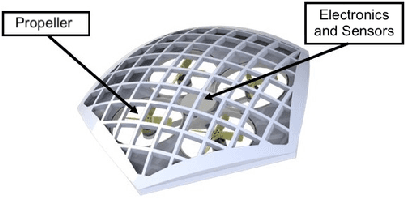
In this paper we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. In the first part of this paper we experimentally show the flying, docking and rolling capabilities of a Shapeshifter constituted by two Cobots, presenting ad-hoc control algorithms. We additionally evaluate the energy-efficiency of the rolling-based mobility strategy by deriving an analytic model of the power consumption and by integrating it in a high-fidelity simulation environment. In the second part we tailor our mission architecture to the exploration of Titan. We show that the properties of the Shapeshifter allow the exploration of the possible cryovolcano Sotra Patera, Titan's Mare and canyons.
Perception-aware Autonomous Mast Motion Planning for Planetary Exploration Rovers
Dec 14, 2019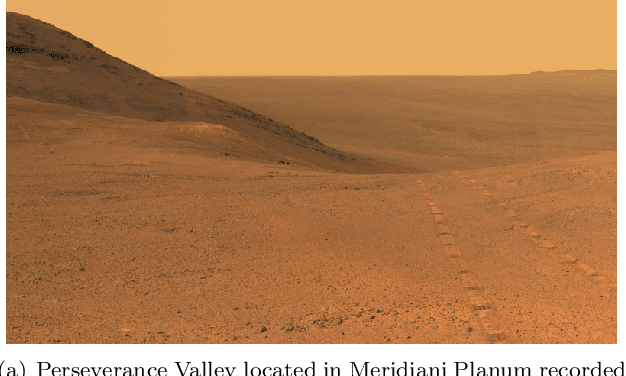
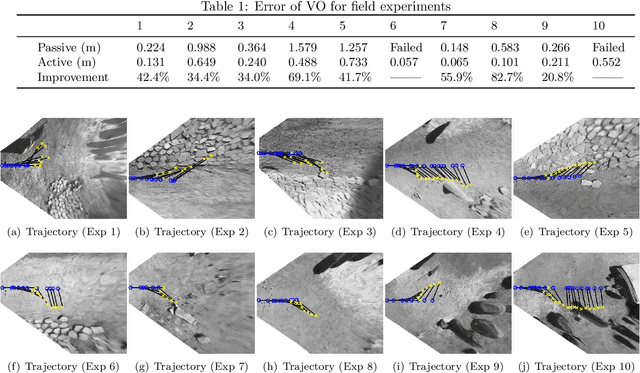
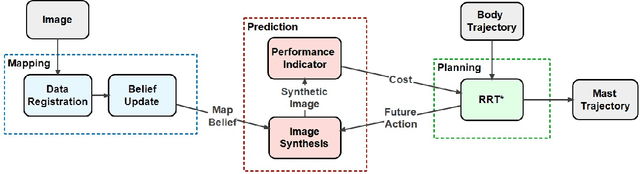
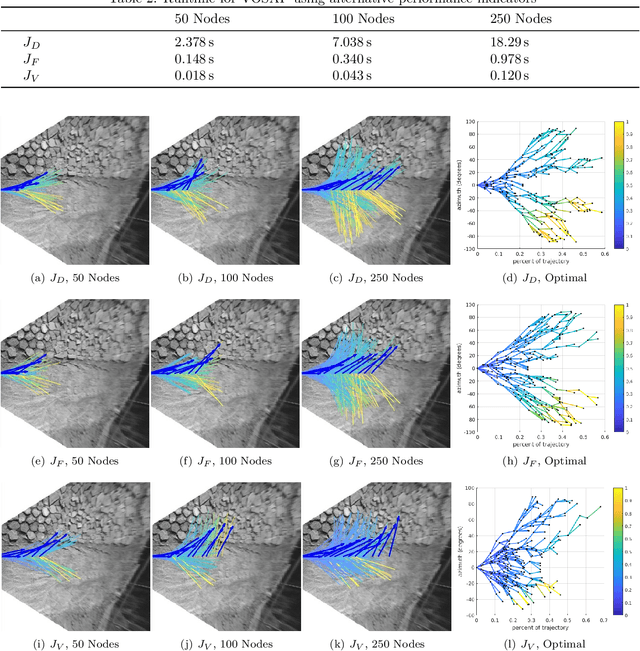
Highly accurate real-time localization is of fundamental importance for the safety and efficiency of planetary rovers exploring the surface of Mars. Mars rover operations rely on vision-based systems to avoid hazards as well as plan safe routes. However, vision-based systems operate on the assumption that sufficient visual texture is visible in the scene. This poses a challenge for vision-based navigation on Mars where regions lacking visual texture are prevalent. To overcome this, we make use of the ability of the rover to actively steer the visual sensor to improve fault tolerance and maximize the perception performance. This paper answers the question of where and when to look by presenting a method for predicting the sensor trajectory that maximizes the localization performance of the rover. This is accomplished by an online assessment of possible trajectories using synthetic, future camera views created from previous observations of the scene. The proposed trajectories are quantified and chosen based on the expected localization performance. In this work, we validate the proposed method in field experiments at the Jet Propulsion Laboratory (JPL) Mars Yard. Furthermore, multiple performance metrics are identified and evaluated for reducing the overall runtime of the algorithm. We show how actively steering the perception system increases the localization accuracy compared to traditional fixed-sensor configurations.
Bayesian Learning-Based Adaptive Control for Safety Critical Systems
Oct 05, 2019
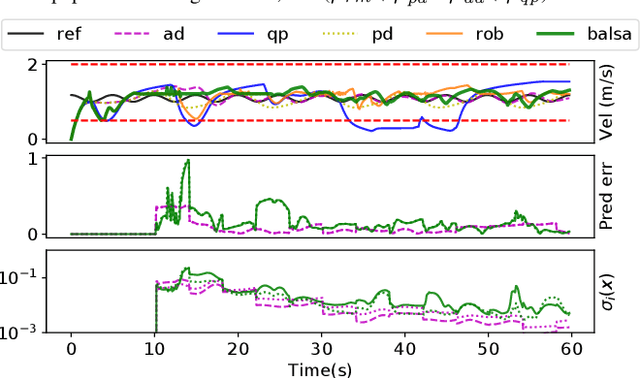
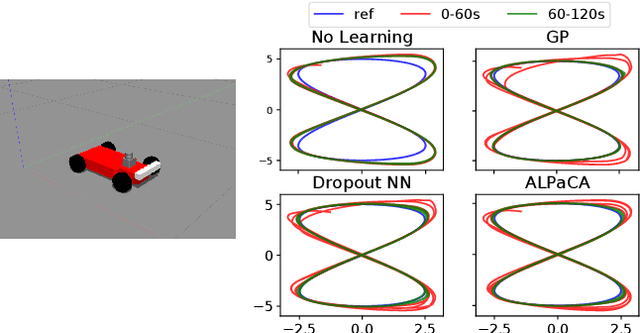
Deep learning has enjoyed much recent success, and applying state-of-the-art model learning methods to controls is an exciting prospect. However, there is a strong reluctance to use these methods on safety-critical systems, which have constraints on safety, stability, and real-time performance. We propose a framework which satisfies these constraints while allowing the use of deep neural networks for learning model uncertainties. Central to our method is the use of Bayesian model learning, which provides an avenue for maintaining appropriate degrees of caution in the face of the unknown. In the proposed approach, we develop an adaptive control framework leveraging the theory of stochastic CLFs (Control Lypunov Functions) and stochastic CBFs (Control Barrier Functions) along with tractable Bayesian model learning via Gaussian Processes or Bayesian neural networks. Under reasonable assumptions, we guarantee stability and safety while adapting to unknown dynamics with probability 1. We demonstrate this architecture for high-speed terrestrial mobility targeting potential applications in safety-critical high-speed Mars rover missions.
Contact Inertial Odometry: Collisions are your Friend
Aug 30, 2019
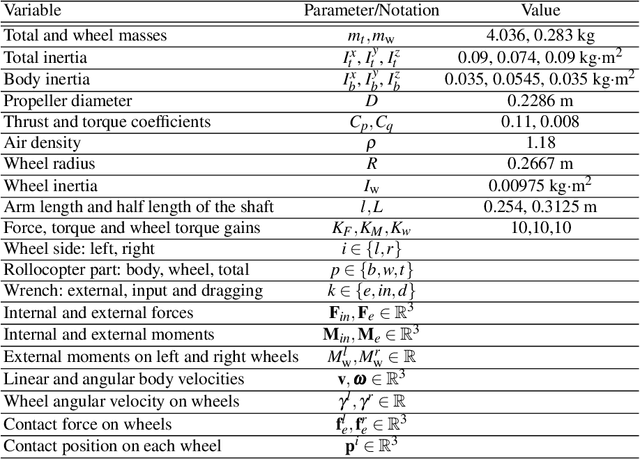

Autonomous exploration of unknown environments with aerial vehicles remains a challenging problem, especially in perceptually degraded conditions. Dust, smoke, fog, and a lack of visual or LiDAR-based features result in severe difficulties for state estimation and planning. The absence of measurement updates from visual or LiDAR odometry can cause large drifts in velocity estimates while propagating measurements from an IMU. Furthermore, it is not possible to construct a map for collision checking in absence of pose updates. In this work, we show that it is indeed possible to navigate without any exteroceptive sensing by exploiting collisions instead of treating them as constraints. To this end, we first perform modeling and system identification for a hybrid ground and aerial vehicle which can withstand collisions. Next, we develop a novel external wrench estimation algorithm for this class of vehicles. We then present a novel contact-based inertial odometry (CIO) algorithm: it uses estimated external forces to detect collisions and to generate pseudo-measurements of the robot velocity, fused in an Extended Kalman Filter. Finally, we implement a reactive planner and control law which encourage exploration by bouncing off obstacles. We validate our framework in hardware experiments and show that a quadrotor can traverse a cluttered environment using an IMU only. This work can be used on drones to recover from visual inertial odometry failure or on micro-drones that do not have the payload capacity to carry cameras, LiDARs or powerful computers.