 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDive into the Scene: Breaking the Perceptual Bottleneck in Vision-Language Decision Making via Focus Plan Generation
Jun 02, 2026In embodied vision-language decision making tasks such as robotic manipulation and navigation, Vision-Language and Vision-Language-Action Models (VLMs & VLAs) are powerful tools with different benefits: VLMs are better at long-term planning, while VLAs are better at reactive control. However, their performance is limited by the same perceptual bottleneck: visual hallucinations arise due to the models' inability to distinguish task-relevant objects from distractors. In principle, accurate identification and focus on critical objects while filtering out irrelevant ones is the key to break this limitation. A straightforward solution is one-step focus: directly attending to essential objects. However, this approach proves ineffective because effective focus inherently requires deep scene understanding. To this end, we propose SceneDiver, a coarse-to-fine focus plan generation method for VLMs leveraging their long-term planning abilities, that first constructs a holistic scene graph to establish initial comprehension, then progressively decomposes the task into simpler sub-problems through an iterative cycle of recognition, understanding, and analysis. To enable reactive control, we also design a lightweight adapter for distilling the deliberate focus ability into VLAs. Evaluations on standard embodied AI benchmarks confirm that our method substantially reduces visual hallucinations for both VLMs and VLAs, while preserving computational efficiency in tasks requiring fast execution. Our code and data are released at: https://future-item.github.io/SceneDiver.
EchoAvatar: Real-time Generative Avatar Animation from Audio Streams
May 27, 2026Real-time synthesis of high-fidelity 3D character motion from audio is a pivotal component for next-generation interactive avatars and virtual assistants. However, most existing approaches are limited to offline processing of complete audio sequences or are constrained to specific domains, rarely handling both speech and music effectively. In this paper, we introduce a novel framework designed to generate continuous, coherent full-body motion from streaming speech and music with low latency. Central to our approach is a unified streaming architecture capable of synthesizing continuous motion from incremental audio inputs. We employ a robust training strategy that enforces strong audio dependency, allowing the model to seamlessly generalize across conversational speech and rhythmic music without requiring explicit domain labels or mode switching. Additionally, we explored Reinforcement Learning to refine the quality of online generation. Furthermore, we bridge reactive animation with intent-driven behavior via a tool-call interface that allows upstream Large Language Models to inject explicit semantic control. By combining this controllability with stream audio-driven synthesis, our framework serves as a plug-and-play solution for transforming voice agents into interactive humanoid avatars. Extensive experiments demonstrate that our method outperforms state-of-the-art realtime baselines in motion quality and synchronization while maintaining the flexibility required for live deployment. Our code, pre-trained models, and videos are available at https://robinwitch.github.io/EchoAvatar-Page.
MosaicMem: Hybrid Spatial Memory for Controllable Video World Models
Mar 17, 2026Video diffusion models are moving beyond short, plausible clips toward world simulators that must remain consistent under camera motion, revisits, and intervention. Yet spatial memory remains a key bottleneck: explicit 3D structures can improve reprojection-based consistency but struggle to depict moving objects, while implicit memory often produces inaccurate camera motion even with correct poses. We propose Mosaic Memory (MosaicMem), a hybrid spatial memory that lifts patches into 3D for reliable localization and targeted retrieval, while exploiting the model's native conditioning to preserve prompt-following generation. MosaicMem composes spatially aligned patches in the queried view via a patch-and-compose interface, preserving what should persist while allowing the model to inpaint what should evolve. With PRoPE camera conditioning and two new memory alignment methods, experiments show improved pose adherence compared to implicit memory and stronger dynamic modeling than explicit baselines. MosaicMem further enables minute-level navigation, memory-based scene editing, and autoregressive rollout.
Multimodal OCR: Parse Anything from Documents
Mar 13, 2026We present Multimodal OCR (MOCR), a document parsing paradigm that jointly parses text and graphics into unified textual representations. Unlike conventional OCR systems that focus on text recognition and leave graphical regions as cropped pixels, our method, termed dots.mocr, treats visual elements such as charts, diagrams, tables, and icons as first-class parsing targets, enabling systems to parse documents while preserving semantic relationships across elements. It offers several advantages: (1) it reconstructs both text and graphics as structured outputs, enabling more faithful document reconstruction; (2) it supports end-to-end training over heterogeneous document elements, allowing models to exploit semantic relations between textual and visual components; and (3) it converts previously discarded graphics into reusable code-level supervision, unlocking multimodal supervision embedded in existing documents. To make this paradigm practical at scale, we build a comprehensive data engine from PDFs, rendered webpages, and native SVG assets, and train a compact 3B-parameter model through staged pretraining and supervised fine-tuning. We evaluate dots.mocr from two perspectives: document parsing and structured graphics parsing. On document parsing benchmarks, it ranks second only to Gemini 3 Pro on our OCR Arena Elo leaderboard, surpasses existing open-source document parsing systems, and sets a new state of the art of 83.9 on olmOCR Bench. On structured graphics parsing, dots.mocr achieves higher reconstruction quality than Gemini 3 Pro across image-to-SVG benchmarks, demonstrating strong performance on charts, UI layouts, scientific figures, and chemical diagrams. These results show a scalable path toward building large-scale image-to-code corpora for multimodal pretraining. Code and models are publicly available at https://github.com/rednote-hilab/dots.mocr.
PLACID: Identity-Preserving Multi-Object Compositing via Video Diffusion with Synthetic Trajectories
Jan 30, 2026Recent advances in generative AI have dramatically improved photorealistic image synthesis, yet they fall short for studio-level multi-object compositing. This task demands simultaneous (i) near-perfect preservation of each item's identity, (ii) precise background and color fidelity, (iii) layout and design elements control, and (iv) complete, appealing displays showcasing all objects. However, current state-of-the-art models often alter object details, omit or duplicate objects, and produce layouts with incorrect relative sizing or inconsistent item presentations. To bridge this gap, we introduce PLACID, a framework that transforms a collection of object images into an appealing multi-object composite. Our approach makes two main contributions. First, we leverage a pretrained image-to-video (I2V) diffusion model with text control to preserve objects consistency, identities, and background details by exploiting temporal priors from videos. Second, we propose a novel data curation strategy that generates synthetic sequences where randomly placed objects smoothly move to their target positions. This synthetic data aligns with the video model's temporal priors during training. At inference, objects initialized at random positions consistently converge into coherent layouts guided by text, with the final frame serving as the composite image. Extensive quantitative evaluations and user studies demonstrate that PLACID surpasses state-of-the-art methods in multi-object compositing, achieving superior identity, background, and color preservation, with less omitted objects and visually appealing results.
Motion-example-controlled Co-speech Gesture Generation Leveraging Large Language Models
Jul 27, 2025The automatic generation of controllable co-speech gestures has recently gained growing attention. While existing systems typically achieve gesture control through predefined categorical labels or implicit pseudo-labels derived from motion examples, these approaches often compromise the rich details present in the original motion examples. We present MECo, a framework for motion-example-controlled co-speech gesture generation by leveraging large language models (LLMs). Our method capitalizes on LLMs' comprehension capabilities through fine-tuning to simultaneously interpret speech audio and motion examples, enabling the synthesis of gestures that preserve example-specific characteristics while maintaining speech congruence. Departing from conventional pseudo-labeling paradigms, we position motion examples as explicit query contexts within the prompt structure to guide gesture generation. Experimental results demonstrate state-of-the-art performance across three metrics: Fr\'echet Gesture Distance (FGD), motion diversity, and example-gesture similarity. Furthermore, our framework enables granular control of individual body parts and accommodates diverse input modalities including motion clips, static poses, human video sequences, and textual descriptions. Our code, pre-trained models, and videos are available at https://robinwitch.github.io/MECo-Page.
RGBAvatar: Reduced Gaussian Blendshapes for Online Modeling of Head Avatars
Mar 17, 2025We present Reduced Gaussian Blendshapes Avatar (RGBAvatar), a method for reconstructing photorealistic, animatable head avatars at speeds sufficient for on-the-fly reconstruction. Unlike prior approaches that utilize linear bases from 3D morphable models (3DMM) to model Gaussian blendshapes, our method maps tracked 3DMM parameters into reduced blendshape weights with an MLP, leading to a compact set of blendshape bases. The learned compact base composition effectively captures essential facial details for specific individuals, and does not rely on the fixed base composition weights of 3DMM, leading to enhanced reconstruction quality and higher efficiency. To further expedite the reconstruction process, we develop a novel color initialization estimation method and a batch-parallel Gaussian rasterization process, achieving state-of-the-art quality with training throughput of about 630 images per second. Moreover, we propose a local-global sampling strategy that enables direct on-the-fly reconstruction, immediately reconstructing the model as video streams in real time while achieving quality comparable to offline settings. Our source code is available at https://github.com/gapszju/RGBAvatar.
Dual Mutual Learning Network with Global-local Awareness for RGB-D Salient Object Detection
Jan 03, 2025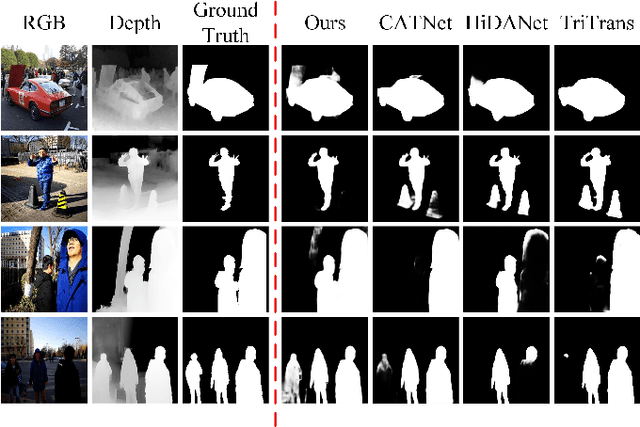
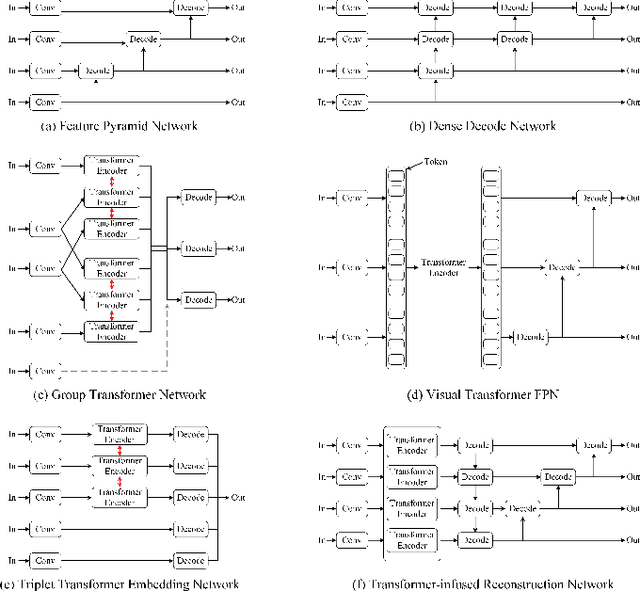
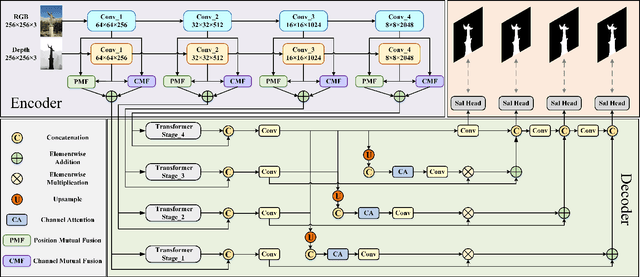
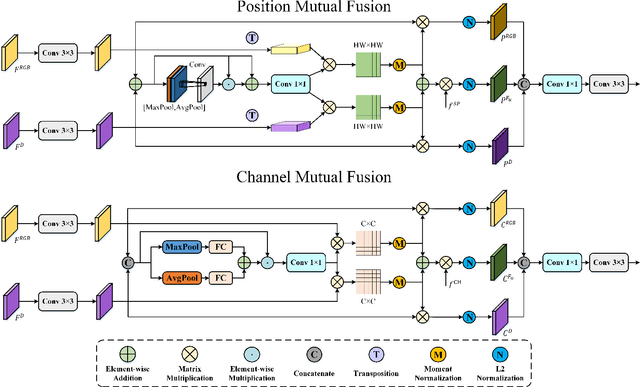
RGB-D salient object detection (SOD), aiming to highlight prominent regions of a given scene by jointly modeling RGB and depth information, is one of the challenging pixel-level prediction tasks. Recently, the dual-attention mechanism has been devoted to this area due to its ability to strengthen the detection process. However, most existing methods directly fuse attentional cross-modality features under a manual-mandatory fusion paradigm without considering the inherent discrepancy between the RGB and depth, which may lead to a reduction in performance. Moreover, the long-range dependencies derived from global and local information make it difficult to leverage a unified efficient fusion strategy. Hence, in this paper, we propose the GL-DMNet, a novel dual mutual learning network with global-local awareness. Specifically, we present a position mutual fusion module and a channel mutual fusion module to exploit the interdependencies among different modalities in spatial and channel dimensions. Besides, we adopt an efficient decoder based on cascade transformer-infused reconstruction to integrate multi-level fusion features jointly. Extensive experiments on six benchmark datasets demonstrate that our proposed GL-DMNet performs better than 24 RGB-D SOD methods, achieving an average improvement of ~3% across four evaluation metrics compared to the second-best model (S3Net). Codes and results are available at https://github.com/kingkung2016/GL-DMNet.
Slow Perception: Let's Perceive Geometric Figures Step-by-step
Dec 30, 2024



Recently, "visual o1" began to enter people's vision, with expectations that this slow-thinking design can solve visual reasoning tasks, especially geometric math problems. However, the reality is that current LVLMs (Large Vision Language Models) can hardly even accurately copy a geometric figure, let alone truly understand the complex inherent logic and spatial relationships within geometric shapes. We believe accurate copying (strong perception) is the first step to visual o1. Accordingly, we introduce the concept of "slow perception" (SP), which guides the model to gradually perceive basic point-line combinations, as our humans, reconstruct complex geometric structures progressively. There are two-fold stages in SP: a) perception decomposition. Perception is not instantaneous. In this stage, complex geometric figures are broken down into basic simple units to unify geometry representation. b) perception flow, which acknowledges that accurately tracing a line is not an easy task. This stage aims to avoid "long visual jumps" in regressing line segments by using a proposed "perceptual ruler" to trace each line stroke-by-stroke. Surprisingly, such a human-like perception manner enjoys an inference time scaling law -- the slower, the better. Researchers strive to speed up the model's perception in the past, but we slow it down again, allowing the model to read the image step-by-step and carefully.
Enhancing Visual Reasoning with Autonomous Imagination in Multimodal Large Language Models
Nov 27, 2024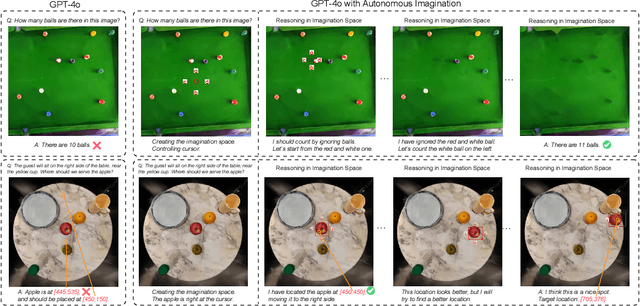

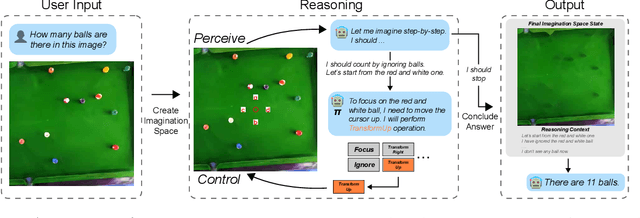
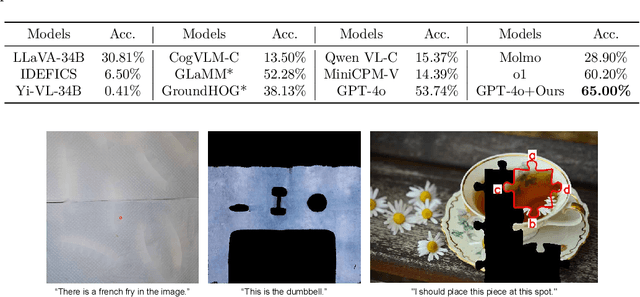
There have been recent efforts to extend the Chain-of-Thought (CoT) paradigm to Multimodal Large Language Models (MLLMs) by finding visual clues in the input scene, advancing the visual reasoning ability of MLLMs. However, current approaches are specially designed for the tasks where clue finding plays a major role in the whole reasoning process, leading to the difficulty in handling complex visual scenes where clue finding does not actually simplify the whole reasoning task. To deal with this challenge, we propose a new visual reasoning paradigm enabling MLLMs to autonomously modify the input scene to new ones based on its reasoning status, such that CoT is reformulated as conducting simple closed-loop decision-making and reasoning steps under a sequence of imagined visual scenes, leading to natural and general CoT construction. To implement this paradigm, we introduce a novel plug-and-play imagination space, where MLLMs conduct visual modifications through operations like focus, ignore, and transform based on their native reasoning ability without specific training. We validate our approach through a benchmark spanning dense counting, simple jigsaw puzzle solving, and object placement, challenging the reasoning ability beyond clue finding. The results verify that while existing techniques fall short, our approach enables MLLMs to effectively reason step by step through autonomous imagination. Project page: https://future-item.github.io/autoimagine-site.