 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Reward Design via Learning Motivation-Consistent Intrinsic Rewards
Jul 29, 2022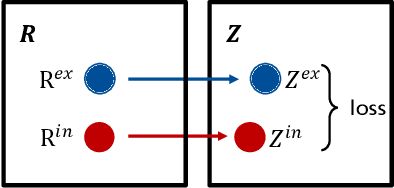

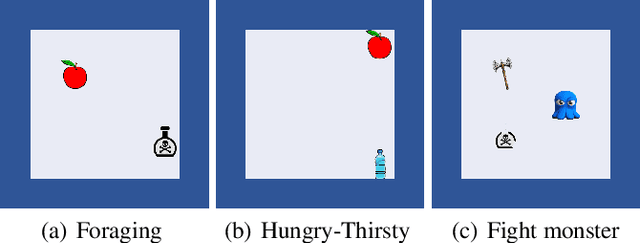
Reward design is a critical part of the application of reinforcement learning, the performance of which strongly depends on how well the reward signal frames the goal of the designer and how well the signal assesses progress in reaching that goal. In many cases, the extrinsic rewards provided by the environment (e.g., win or loss of a game) are very sparse and make it difficult to train agents directly. Researchers usually assist the learning of agents by adding some auxiliary rewards in practice. However, designing auxiliary rewards is often turned to a trial-and-error search for reward settings that produces acceptable results. In this paper, we propose to automatically generate goal-consistent intrinsic rewards for the agent to learn, by maximizing which the expected accumulative extrinsic rewards can be maximized. To this end, we introduce the concept of motivation which captures the underlying goal of maximizing certain rewards and propose the motivation based reward design method. The basic idea is to shape the intrinsic rewards by minimizing the distance between the intrinsic and extrinsic motivations. We conduct extensive experiments and show that our method performs better than the state-of-the-art methods in handling problems of delayed reward, exploration, and credit assignment.
A Closed-Loop Perception, Decision-Making and Reasoning Mechanism for Human-Like Navigation
Jul 25, 2022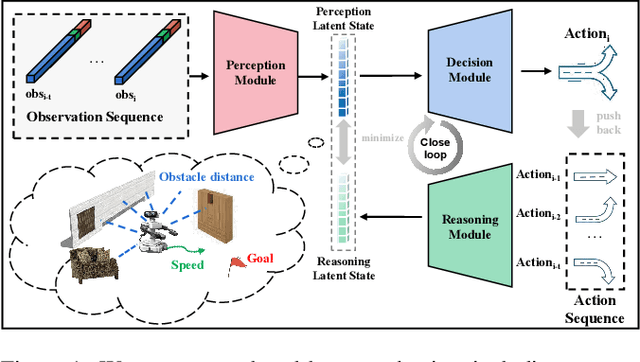
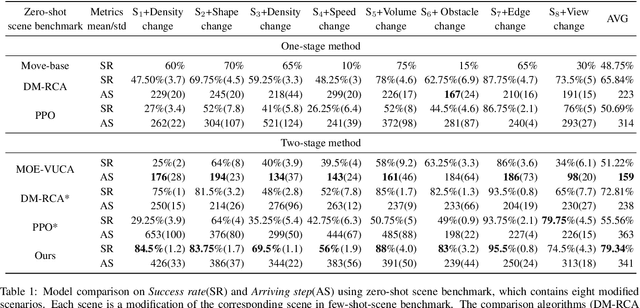
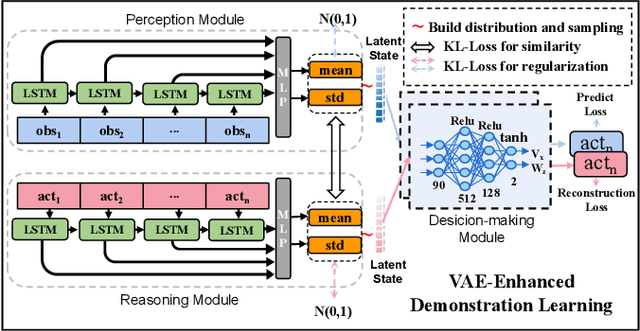
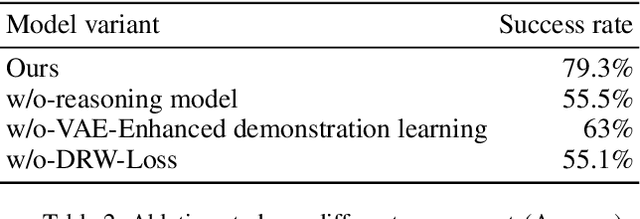
Reliable navigation systems have a wide range of applications in robotics and autonomous driving. Current approaches employ an open-loop process that converts sensor inputs directly into actions. However, these open-loop schemes are challenging to handle complex and dynamic real-world scenarios due to their poor generalization. Imitating human navigation, we add a reasoning process to convert actions back to internal latent states, forming a two-stage closed loop of perception, decision-making, and reasoning. Firstly, VAE-Enhanced Demonstration Learning endows the model with the understanding of basic navigation rules. Then, two dual processes in RL-Enhanced Interaction Learning generate reward feedback for each other and collectively enhance obstacle avoidance capability. The reasoning model can substantially promote generalization and robustness, and facilitate the deployment of the algorithm to real-world robots without elaborate transfers. Experiments show our method is more adaptable to novel scenarios compared with state-of-the-art approaches.
NeurAR: Neural Uncertainty for Autonomous 3D Reconstruction
Jul 22, 2022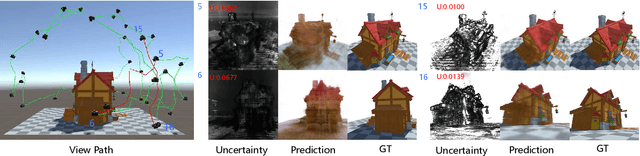
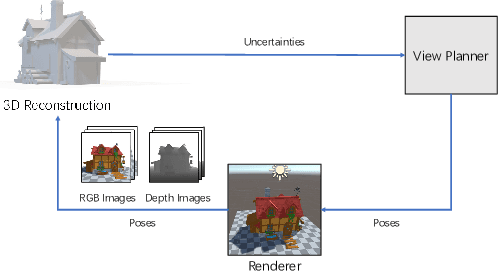
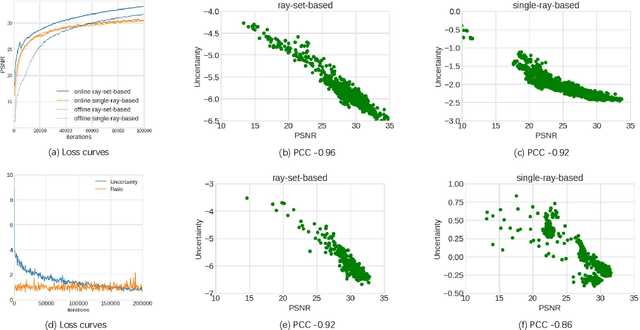
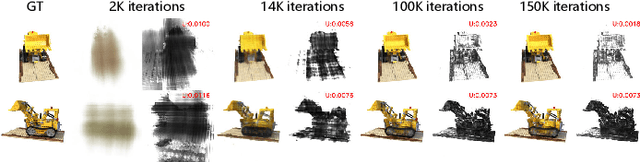
Implicit neural representations have shown compelling results in offline 3D reconstruction and also recently demonstrated the potential for online SLAM systems. However, applying them to autonomous 3D reconstruction, where robots are required to explore a scene and plan a view path for the reconstruction, has not been studied. In this paper, we explore for the first time the possibility of using implicit neural representations for autonomous 3D scene reconstruction by addressing two key challenges: 1) seeking a criterion to measure the quality of the candidate viewpoints for the view planning based on the new representations, and 2) learning the criterion from data that can generalize to different scenes instead of hand-crafting one. For the first challenge, a proxy of Peak Signal-to-Noise Ratio (PSNR) is proposed to quantify a viewpoint quality. The proxy is acquired by treating the color of a spatial point in a scene as a random variable under a Gaussian distribution rather than a deterministic one; the variance of the distribution quantifies the uncertainty of the reconstruction and composes the proxy. For the second challenge, the proxy is optimized jointly with the parameters of an implicit neural network for the scene. With the proposed view quality criterion, we can then apply the new representations to autonomous 3D reconstruction. Our method demonstrates significant improvements on various metrics for the rendered image quality and the geometry quality of the reconstructed 3D models when compared with variants using TSDF or reconstruction without view planning.
Off-Beat Multi-Agent Reinforcement Learning
May 27, 2022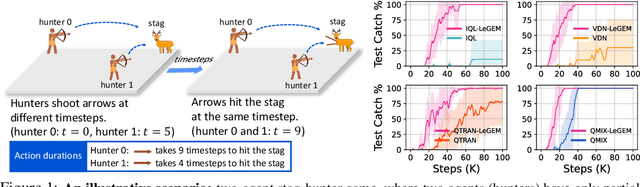
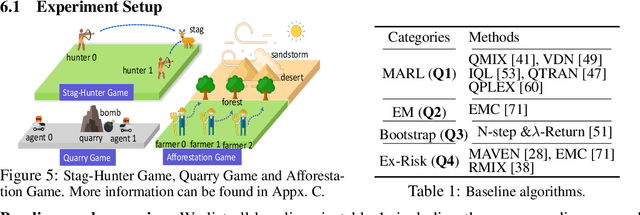

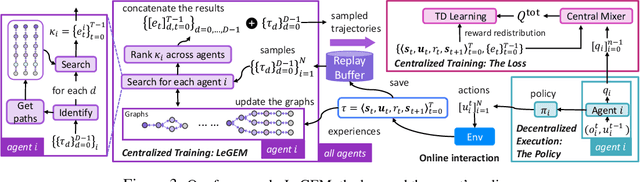
We investigate model-free multi-agent reinforcement learning (MARL) in environments where off-beat actions are prevalent, i.e., all actions have pre-set execution durations. During execution durations, the environment changes are influenced by, but not synchronised with, action execution. Such a setting is ubiquitous in many real-world problems. However, most MARL methods assume actions are executed immediately after inference, which is often unrealistic and can lead to catastrophic failure for multi-agent coordination with off-beat actions. In order to fill this gap, we develop an algorithmic framework for MARL with off-beat actions. We then propose a novel episodic memory, LeGEM, for model-free MARL algorithms. LeGEM builds agents' episodic memories by utilizing agents' individual experiences. It boosts multi-agent learning by addressing the challenging temporal credit assignment problem raised by the off-beat actions via our novel reward redistribution scheme, alleviating the issue of non-Markovian reward. We evaluate LeGEM on various multi-agent scenarios with off-beat actions, including Stag-Hunter Game, Quarry Game, Afforestation Game, and StarCraft II micromanagement tasks. Empirical results show that LeGEM significantly boosts multi-agent coordination and achieves leading performance and improved sample efficiency.
Episodic Multi-agent Reinforcement Learning with Curiosity-Driven Exploration
Nov 22, 2021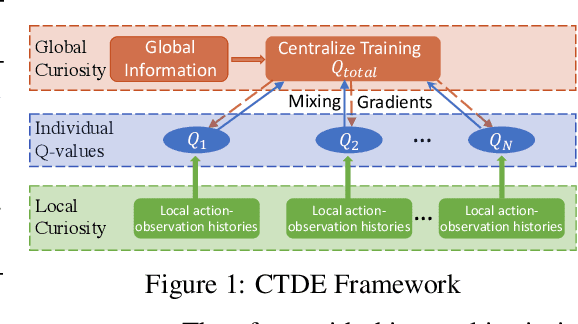
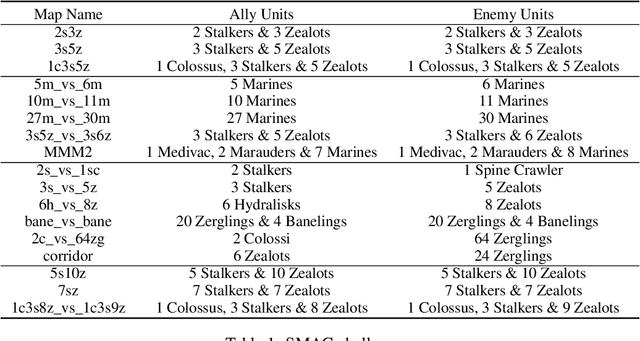
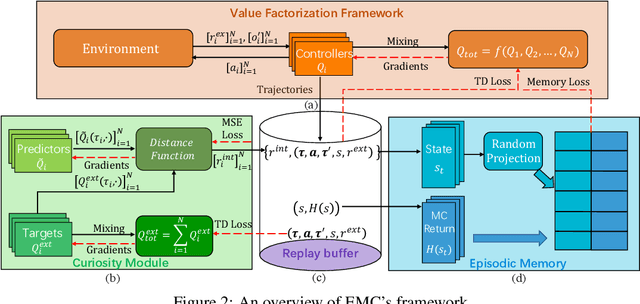
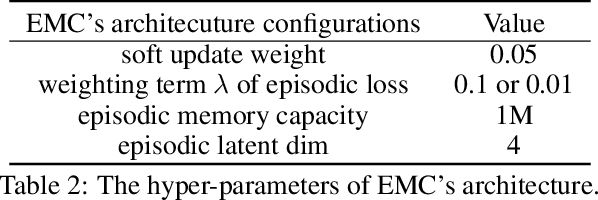
Efficient exploration in deep cooperative multi-agent reinforcement learning (MARL) still remains challenging in complex coordination problems. In this paper, we introduce a novel Episodic Multi-agent reinforcement learning with Curiosity-driven exploration, called EMC. We leverage an insight of popular factorized MARL algorithms that the "induced" individual Q-values, i.e., the individual utility functions used for local execution, are the embeddings of local action-observation histories, and can capture the interaction between agents due to reward backpropagation during centralized training. Therefore, we use prediction errors of individual Q-values as intrinsic rewards for coordinated exploration and utilize episodic memory to exploit explored informative experience to boost policy training. As the dynamics of an agent's individual Q-value function captures the novelty of states and the influence from other agents, our intrinsic reward can induce coordinated exploration to new or promising states. We illustrate the advantages of our method by didactic examples, and demonstrate its significant outperformance over state-of-the-art MARL baselines on challenging tasks in the StarCraft II micromanagement benchmark.
Neural-to-Tree Policy Distillation with Policy Improvement Criterion
Aug 16, 2021
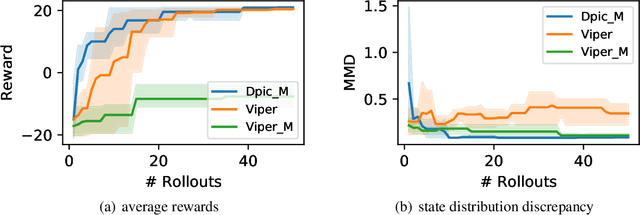
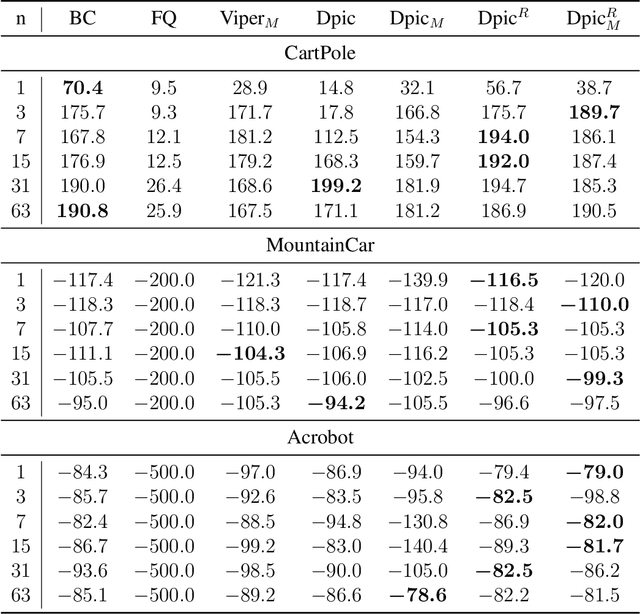
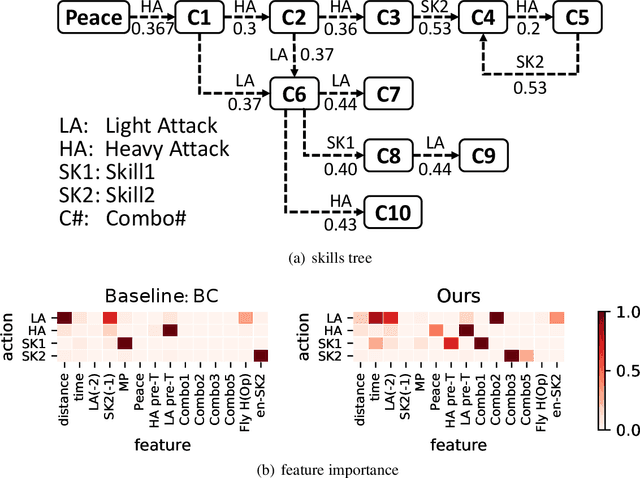
While deep reinforcement learning has achieved promising results in challenging decision-making tasks, the main bones of its success --- deep neural networks are mostly black-boxes. A feasible way to gain insight into a black-box model is to distill it into an interpretable model such as a decision tree, which consists of if-then rules and is easy to grasp and be verified. However, the traditional model distillation is usually a supervised learning task under a stationary data distribution assumption, which is violated in reinforcement learning. Therefore, a typical policy distillation that clones model behaviors with even a small error could bring a data distribution shift, resulting in an unsatisfied distilled policy model with low fidelity or low performance. In this paper, we propose to address this issue by changing the distillation objective from behavior cloning to maximizing an advantage evaluation. The novel distillation objective maximizes an approximated cumulative reward and focuses more on disastrous behaviors in critical states, which controls the data shift effect. We evaluate our method on several Gym tasks, a commercial fight game, and a self-driving car simulator. The empirical results show that the proposed method can preserve a higher cumulative reward than behavior cloning and learn a more consistent policy to the original one. Moreover, by examining the extracted rules from the distilled decision trees, we demonstrate that the proposed method delivers reasonable and robust decisions.
GLIB: Towards Automated Test Oracle for Graphically-Rich Applications
Jul 15, 2021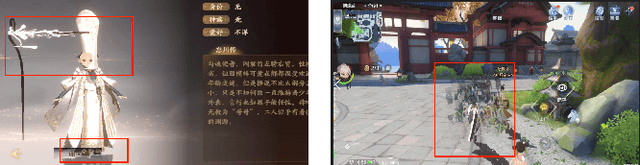
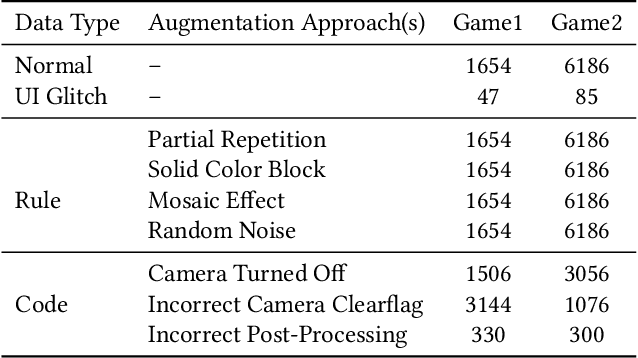
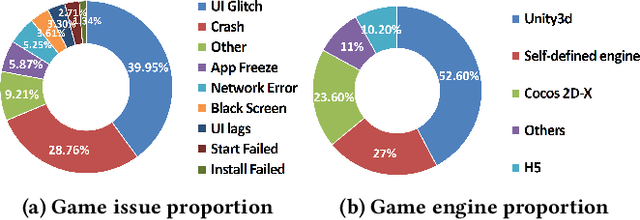
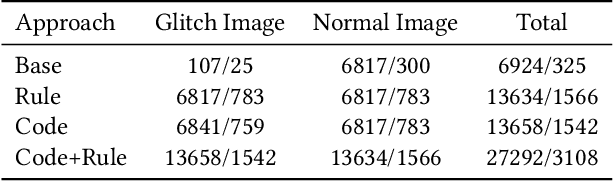
Graphically-rich applications such as games are ubiquitous with attractive visual effects of Graphical User Interface (GUI) that offers a bridge between software applications and end-users. However, various types of graphical glitches may arise from such GUI complexity and have become one of the main component of software compatibility issues. Our study on bug reports from game development teams in NetEase Inc. indicates that graphical glitches frequently occur during the GUI rendering and severely degrade the quality of graphically-rich applications such as video games. Existing automated testing techniques for such applications focus mainly on generating various GUI test sequences and check whether the test sequences can cause crashes. These techniques require constant human attention to captures non-crashing bugs such as bugs causing graphical glitches. In this paper, we present the first step in automating the test oracle for detecting non-crashing bugs in graphically-rich applications. Specifically, we propose \texttt{GLIB} based on a code-based data augmentation technique to detect game GUI glitches. We perform an evaluation of \texttt{GLIB} on 20 real-world game apps (with bug reports available) and the result shows that \texttt{GLIB} can achieve 100\% precision and 99.5\% recall in detecting non-crashing bugs such as game GUI glitches. Practical application of \texttt{GLIB} on another 14 real-world games (without bug reports) further demonstrates that \texttt{GLIB} can effectively uncover GUI glitches, with 48 of 53 bugs reported by \texttt{GLIB} having been confirmed and fixed so far.
Unifying Behavioral and Response Diversity for Open-ended Learning in Zero-sum Games
Jun 10, 2021
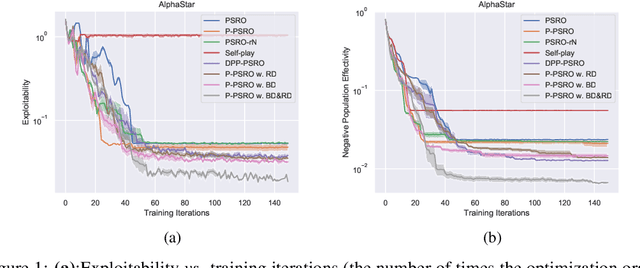
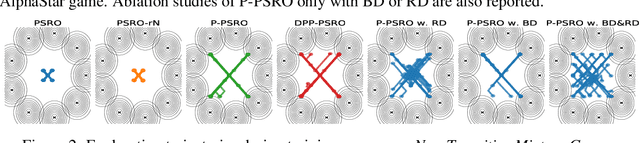
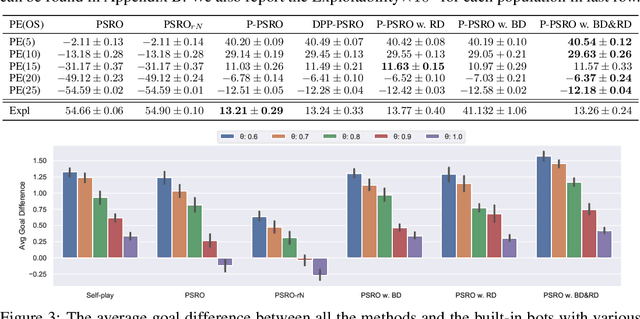
Measuring and promoting policy diversity is critical for solving games with strong non-transitive dynamics where strategic cycles exist, and there is no consistent winner (e.g., Rock-Paper-Scissors). With that in mind, maintaining a pool of diverse policies via open-ended learning is an attractive solution, which can generate auto-curricula to avoid being exploited. However, in conventional open-ended learning algorithms, there are no widely accepted definitions for diversity, making it hard to construct and evaluate the diverse policies. In this work, we summarize previous concepts of diversity and work towards offering a unified measure of diversity in multi-agent open-ended learning to include all elements in Markov games, based on both Behavioral Diversity (BD) and Response Diversity (RD). At the trajectory distribution level, we re-define BD in the state-action space as the discrepancies of occupancy measures. For the reward dynamics, we propose RD to characterize diversity through the responses of policies when encountering different opponents. We also show that many current diversity measures fall in one of the categories of BD or RD but not both. With this unified diversity measure, we design the corresponding diversity-promoting objective and population effectivity when seeking the best responses in open-ended learning. We validate our methods in both relatively simple games like matrix game, non-transitive mixture model, and the complex \textit{Google Research Football} environment. The population found by our methods reveals the lowest exploitability, highest population effectivity in matrix game and non-transitive mixture model, as well as the largest goal difference when interacting with opponents of various levels in \textit{Google Research Football}.
Fever Basketball: A Complex, Flexible, and Asynchronized Sports Game Environment for Multi-agent Reinforcement Learning
Dec 06, 2020
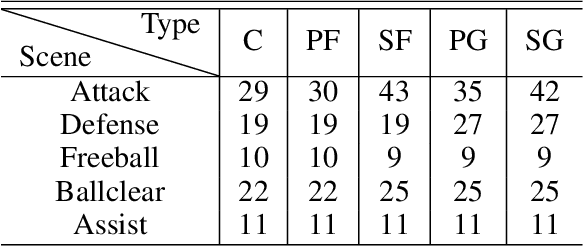
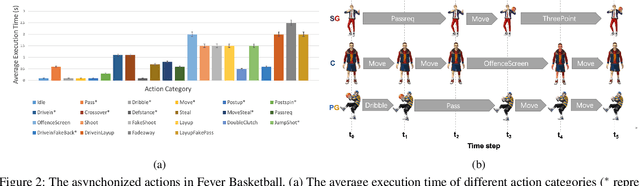
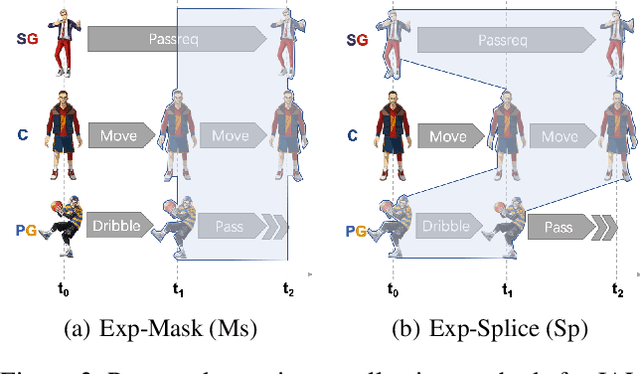
The development of deep reinforcement learning (DRL) has benefited from the emergency of a variety type of game environments where new challenging problems are proposed and new algorithms can be tested safely and quickly, such as Board games, RTS, FPS, and MOBA games. However, many existing environments lack complexity and flexibility and assume the actions are synchronously executed in multi-agent settings, which become less valuable. We introduce the Fever Basketball game, a novel reinforcement learning environment where agents are trained to play basketball game. It is a complex and challenging environment that supports multiple characters, multiple positions, and both the single-agent and multi-agent player control modes. In addition, to better simulate real-world basketball games, the execution time of actions differs among players, which makes Fever Basketball a novel asynchronized environment. We evaluate commonly used multi-agent algorithms of both independent learners and joint-action learners in three game scenarios with varying difficulties, and heuristically propose two baseline methods to diminish the extra non-stationarity brought by asynchronism in Fever Basketball Benchmarks. Besides, we propose an integrated curricula training (ICT) framework to better handle Fever Basketball problems, which includes several game-rule based cascading curricula learners and a coordination curricula switcher focusing on enhancing coordination within the team. The results show that the game remains challenging and can be used as a benchmark environment for studies like long-time horizon, sparse rewards, credit assignment, and non-stationarity, etc. in multi-agent settings.
Learning to Utilize Shaping Rewards: A New Approach of Reward Shaping
Nov 05, 2020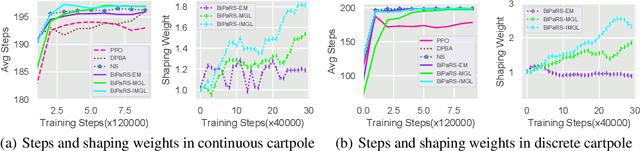
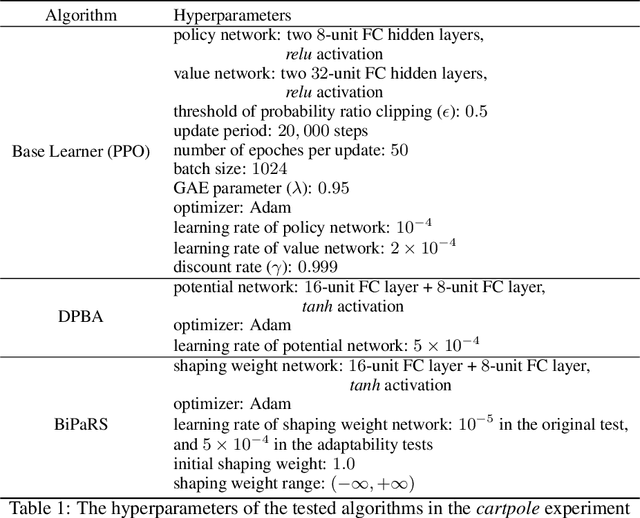
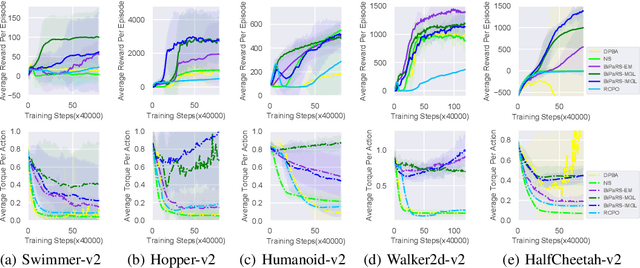

Reward shaping is an effective technique for incorporating domain knowledge into reinforcement learning (RL). Existing approaches such as potential-based reward shaping normally make full use of a given shaping reward function. However, since the transformation of human knowledge into numeric reward values is often imperfect due to reasons such as human cognitive bias, completely utilizing the shaping reward function may fail to improve the performance of RL algorithms. In this paper, we consider the problem of adaptively utilizing a given shaping reward function. We formulate the utilization of shaping rewards as a bi-level optimization problem, where the lower level is to optimize policy using the shaping rewards and the upper level is to optimize a parameterized shaping weight function for true reward maximization. We formally derive the gradient of the expected true reward with respect to the shaping weight function parameters and accordingly propose three learning algorithms based on different assumptions. Experiments in sparse-reward cartpole and MuJoCo environments show that our algorithms can fully exploit beneficial shaping rewards, and meanwhile ignore unbeneficial shaping rewards or even transform them into beneficial ones.