 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting Mixture Policies in Entropy-Regularized Actor-Critic
May 09, 2026Mixture policies theoretically offer greater flexibility than unimodal policies in continuous action reinforcement learning, but the practical benefits of this complexity remain elusive. Mixture policies are notably absent from most state-of-the-art algorithms, raising a fundamental question: Is the added representational overhead useful? We show that increased flexibility can theoretically enhance solution quality and entropy robustness. Yet standard algorithms like SAC do not leverage these advantages. A core issue is the lack of a low-variance reparameterization trick for mixtures, a luxury Gaussian policies enjoy. We propose a marginalized reparameterization (MRP) estimator to address this, proving it offers lower variance than the standard likelihood-ratio (LR) approach. Our experiments across Gym MuJoCo, DeepMind Control Suite, and MetaWorld show that MRP mixture policies significantly outperform their LR ones, and reach parity (sometimes better) with Gaussian counterparts. In addition, we do find several cases where MRP mixture policies exhibit clear empirical advantages. In this paper, we provide a clearer understanding of the trade-offs involved, elevating MRP mixture policies from theoretical curiosity to a practical tool.
Extending Differential Temporal Difference Methods for Episodic Problems
May 06, 2026Differential temporal difference (TD) methods are value-based reinforcement learning algorithms that have been proposed for infinite-horizon problems. They rely on reward centering, where each reward is centered by the average reward. This keeps the return bounded and removes a value function's state-independent offset. However, reward centering can alter the optimal policy in episodic problems, limiting its applicability. Motivated by recent works that emphasize the role of normalization in streaming deep reinforcement learning, we study reward centering in episodic problems and propose a generalization of differential TD. We prove that this generalization maintains the ordering of policies in the presence of termination, and thus extends differential TD to episodic problems. We show equivalence with a form of linear TD, thereby inheriting theoretical guarantees that have been shown for those algorithms. We then extend several streaming reinforcement learning algorithms to their differential counterparts. Across a range of base algorithms and environments, we empirically validate that reward centering can improve sample efficiency in episodic problems.
Deep Policy Gradient Methods Without Batch Updates, Target Networks, or Replay Buffers
Nov 22, 2024Modern deep policy gradient methods achieve effective performance on simulated robotic tasks, but they all require large replay buffers or expensive batch updates, or both, making them incompatible for real systems with resource-limited computers. We show that these methods fail catastrophically when limited to small replay buffers or during incremental learning, where updates only use the most recent sample without batch updates or a replay buffer. We propose a novel incremental deep policy gradient method -- Action Value Gradient (AVG) and a set of normalization and scaling techniques to address the challenges of instability in incremental learning. On robotic simulation benchmarks, we show that AVG is the only incremental method that learns effectively, often achieving final performance comparable to batch policy gradient methods. This advancement enabled us to show for the first time effective deep reinforcement learning with real robots using only incremental updates, employing a robotic manipulator and a mobile robot.
Episodic Multi-agent Reinforcement Learning with Curiosity-Driven Exploration
Nov 22, 2021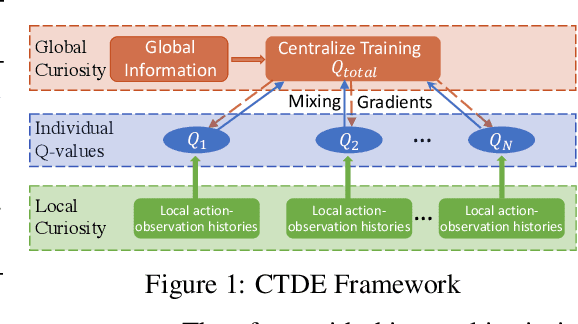
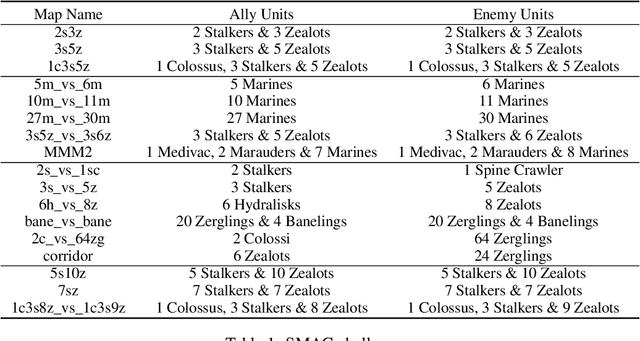
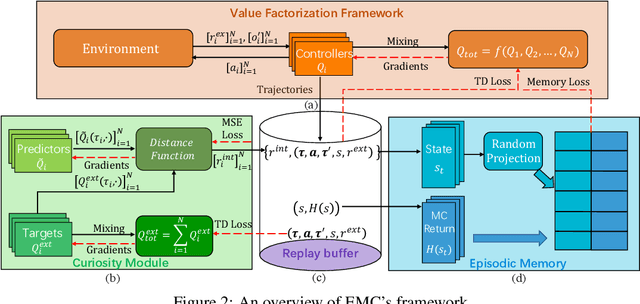
Efficient exploration in deep cooperative multi-agent reinforcement learning (MARL) still remains challenging in complex coordination problems. In this paper, we introduce a novel Episodic Multi-agent reinforcement learning with Curiosity-driven exploration, called EMC. We leverage an insight of popular factorized MARL algorithms that the "induced" individual Q-values, i.e., the individual utility functions used for local execution, are the embeddings of local action-observation histories, and can capture the interaction between agents due to reward backpropagation during centralized training. Therefore, we use prediction errors of individual Q-values as intrinsic rewards for coordinated exploration and utilize episodic memory to exploit explored informative experience to boost policy training. As the dynamics of an agent's individual Q-value function captures the novelty of states and the influence from other agents, our intrinsic reward can induce coordinated exploration to new or promising states. We illustrate the advantages of our method by didactic examples, and demonstrate its significant outperformance over state-of-the-art MARL baselines on challenging tasks in the StarCraft II micromanagement benchmark.