 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGHOST: Hierarchical Sub-Goal Policies for Generalizing Robot Manipulation
Jun 08, 2026We present GHOST, a framework for learning visuomotor manipulation policies that generalize beyond the training distribution. GHOST factorizes control into (i) a high-level policy that predicts the next sub-goal as a distribution over 3D end-effector poses from multi-view RGB-D observations, and (ii) a low-level goal-conditioned controller that executes embodiment-specific actions. To condition image-based policies on 3D goals, we introduce a simple spatial interface that projects predicted goals into the image plane and represents them as end-effector heatmaps. Across a suite of manipulation tasks, this hierarchical factorization consistently improves performance and robustness compared to a flat Diffusion Policy. Further, we show that this hierarchical interface also makes it easy to incorporate human demonstrations without relying on (noisy) action retargeting. As sub-goals are largely embodiment-agnostic, we train the high-level policy on human video to specify how learned skills should be applied and composed, while keeping the low-level policy trained purely on robot data. This hierarchy enables adaptation to novel objects and task variations using a small number of human demonstrations.
Simple is what you need for efficient and accurate medical image segmentation
Jun 16, 2025While modern segmentation models often prioritize performance over practicality, we advocate a design philosophy prioritizing simplicity and efficiency, and attempted high performance segmentation model design. This paper presents SimpleUNet, a scalable ultra-lightweight medical image segmentation model with three key innovations: (1) A partial feature selection mechanism in skip connections for redundancy reduction while enhancing segmentation performance; (2) A fixed-width architecture that prevents exponential parameter growth across network stages; (3) An adaptive feature fusion module achieving enhanced representation with minimal computational overhead. With a record-breaking 16 KB parameter configuration, SimpleUNet outperforms LBUNet and other lightweight benchmarks across multiple public datasets. The 0.67 MB variant achieves superior efficiency (8.60 GFLOPs) and accuracy, attaining a mean DSC/IoU of 85.76%/75.60% on multi-center breast lesion datasets, surpassing both U-Net and TransUNet. Evaluations on skin lesion datasets (ISIC 2017/2018: mDice 84.86%/88.77%) and endoscopic polyp segmentation (KVASIR-SEG: 86.46%/76.48% mDice/mIoU) confirm consistent dominance over state-of-the-art models. This work demonstrates that extreme model compression need not compromise performance, providing new insights for efficient and accurate medical image segmentation. Codes can be found at https://github.com/Frankyu5666666/SimpleUNet.
Generalizable Humanoid Manipulation with Improved 3D Diffusion Policies
Oct 14, 2024



Humanoid robots capable of autonomous operation in diverse environments have long been a goal for roboticists. However, autonomous manipulation by humanoid robots has largely been restricted to one specific scene, primarily due to the difficulty of acquiring generalizable skills. Recent advances in 3D visuomotor policies, such as the 3D Diffusion Policy (DP3), have shown promise in extending these capabilities to wilder environments. However, 3D visuomotor policies often rely on camera calibration and point-cloud segmentation, which present challenges for deployment on mobile robots like humanoids. In this work, we introduce the Improved 3D Diffusion Policy (iDP3), a novel 3D visuomotor policy that eliminates these constraints by leveraging egocentric 3D visual representations. We demonstrate that iDP3 enables a full-sized humanoid robot to autonomously perform skills in diverse real-world scenarios, using only data collected in the lab. Videos are available at: https://humanoid-manipulation.github.io
Lessons from Learning to Spin "Pens"
Jul 26, 2024



In-hand manipulation of pen-like objects is an important skill in our daily lives, as many tools such as hammers and screwdrivers are similarly shaped. However, current learning-based methods struggle with this task due to a lack of high-quality demonstrations and the significant gap between simulation and the real world. In this work, we push the boundaries of learning-based in-hand manipulation systems by demonstrating the capability to spin pen-like objects. We first use reinforcement learning to train an oracle policy with privileged information and generate a high-fidelity trajectory dataset in simulation. This serves two purposes: 1) pre-training a sensorimotor policy in simulation; 2) conducting open-loop trajectory replay in the real world. We then fine-tune the sensorimotor policy using these real-world trajectories to adapt it to the real world dynamics. With less than 50 trajectories, our policy learns to rotate more than ten pen-like objects with different physical properties for multiple revolutions. We present a comprehensive analysis of our design choices and share the lessons learned during development.
MPCODER: Multi-user Personalized Code Generator with Explicit and Implicit Style Representation Learning
Jun 25, 2024



Large Language Models (LLMs) have demonstrated great potential for assisting developers in their daily development. However, most research focuses on generating correct code, how to use LLMs to generate personalized code has seldom been investigated. To bridge this gap, we proposed MPCoder (Multi-user Personalized Code Generator) to generate personalized code for multiple users. To better learn coding style features, we utilize explicit coding style residual learning to capture the syntax code style standards and implicit style learning to capture the semantic code style conventions. We train a multi-user style adapter to better differentiate the implicit feature representations of different users through contrastive learning, ultimately enabling personalized code generation for multiple users. We further propose a novel evaluation metric for estimating similarities between codes of different coding styles. The experimental results show the effectiveness of our approach for this novel task.
Robot Synesthesia: In-Hand Manipulation with Visuotactile Sensing
Dec 04, 2023



Executing contact-rich manipulation tasks necessitates the fusion of tactile and visual feedback. However, the distinct nature of these modalities poses significant challenges. In this paper, we introduce a system that leverages visual and tactile sensory inputs to enable dexterous in-hand manipulation. Specifically, we propose Robot Synesthesia, a novel point cloud-based tactile representation inspired by human tactile-visual synesthesia. This approach allows for the simultaneous and seamless integration of both sensory inputs, offering richer spatial information and facilitating better reasoning about robot actions. The method, trained in a simulated environment and then deployed to a real robot, is applicable to various in-hand object rotation tasks. Comprehensive ablations are performed on how the integration of vision and touch can improve reinforcement learning and Sim2Real performance. Our project page is available at https://yingyuan0414.github.io/visuotactile/ .
SpacePhish: The Evasion-space of Adversarial Attacks against Phishing Website Detectors using Machine Learning
Oct 24, 2022Existing literature on adversarial Machine Learning (ML) focuses either on showing attacks that break every ML model, or defenses that withstand most attacks. Unfortunately, little consideration is given to the actual \textit{cost} of the attack or the defense. Moreover, adversarial samples are often crafted in the "feature-space", making the corresponding evaluations of questionable value. Simply put, the current situation does not allow to estimate the actual threat posed by adversarial attacks, leading to a lack of secure ML systems. We aim to clarify such confusion in this paper. By considering the application of ML for Phishing Website Detection (PWD), we formalize the "evasion-space" in which an adversarial perturbation can be introduced to fool a ML-PWD -- demonstrating that even perturbations in the "feature-space" are useful. Then, we propose a realistic threat model describing evasion attacks against ML-PWD that are cheap to stage, and hence intrinsically more attractive for real phishers. Finally, we perform the first statistically validated assessment of state-of-the-art ML-PWD against 12 evasion attacks. Our evaluation shows (i) the true efficacy of evasion attempts that are more likely to occur; and (ii) the impact of perturbations crafted in different evasion-spaces. Our realistic evasion attempts induce a statistically significant degradation (3-10% at $p\!<$0.05), and their cheap cost makes them a subtle threat. Notably, however, some ML-PWD are immune to our most realistic attacks ($p$=0.22). Our contribution paves the way for a much needed re-assessment of adversarial attacks against ML systems for cybersecurity.
A novel sentence embedding based topic detection method for micro-blog
Jun 10, 2020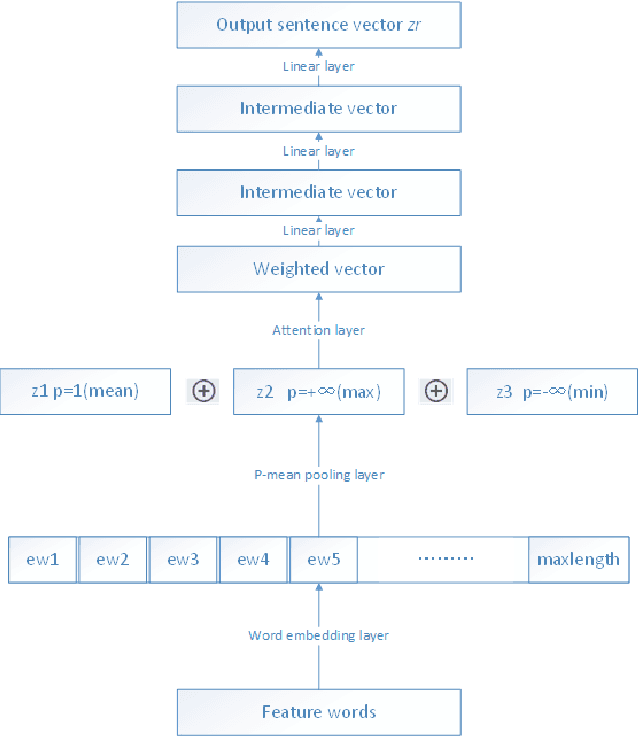
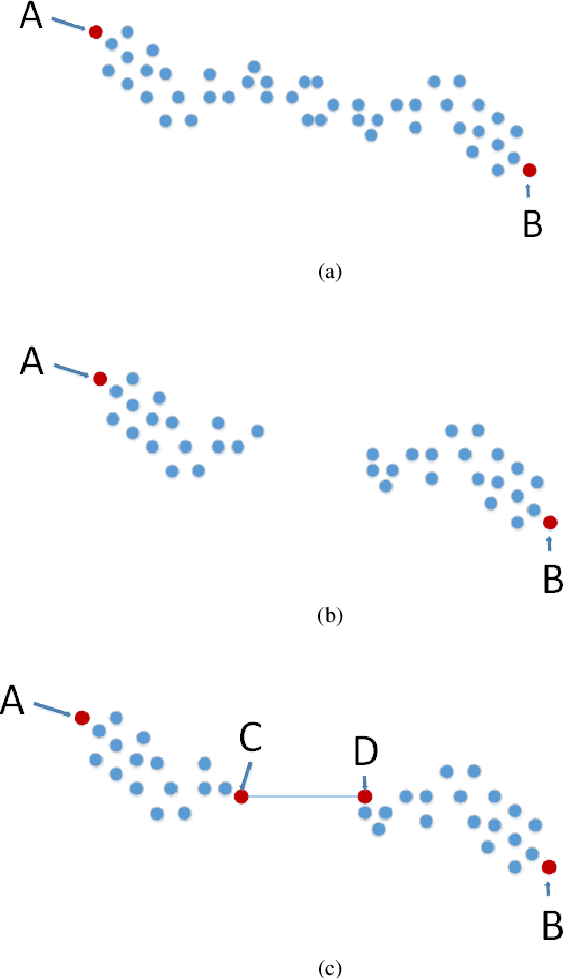
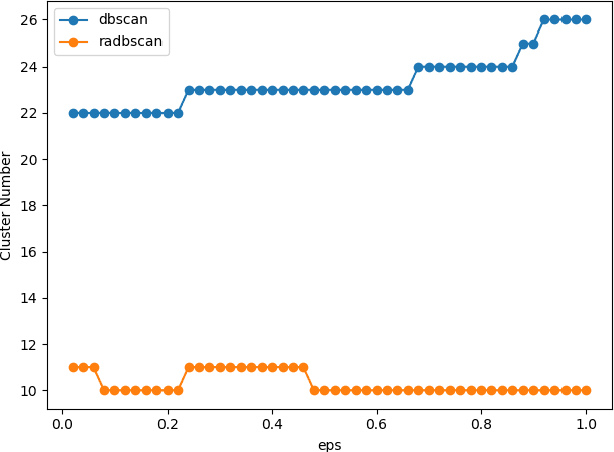
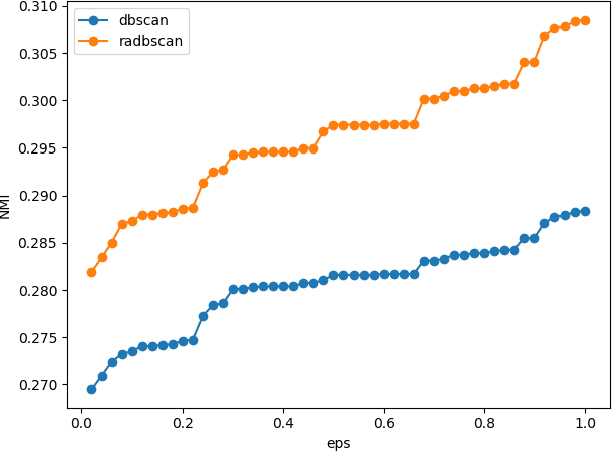
Topic detection is a challenging task, especially without knowing the exact number of topics. In this paper, we present a novel approach based on neural network to detect topics in the micro-blogging dataset. We use an unsupervised neural sentence embedding model to map the blogs to an embedding space. Our model is a weighted power mean word embedding model, and the weights are calculated by attention mechanism. Experimental result shows our embedding method performs better than baselines in sentence clustering. In addition, we propose an improved clustering algorithm referred as relationship-aware DBSCAN (RADBSCAN). It can discover topics from a micro-blogging dataset, and the topic number depends on dataset character itself. Moreover, in order to solve the problem of parameters sensitive, we take blog forwarding relationship as a bridge of two independent clusters. Finally, we validate our approach on a dataset from sina micro-blog. The result shows that we can detect all the topics successfully and extract keywords in each topic.