 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParameter Convergence Detector Based on VAMP Deep Unfolding: A Novel Radar Constant False Alarm Rate Detection Algorithm
Apr 14, 2025The sub-Nyquist radar framework exploits the sparsity of signals, which effectively alleviates the pressure on system storage and transmission bandwidth. Compressed sensing (CS) algorithms, such as the VAMP algorithm, are used for sparse signal processing in the sub-Nyquist radar framework. By combining deep unfolding techniques with VAMP, faster convergence and higher accuracy than traditional CS algorithms are achieved. However, deep unfolding disrupts the parameter constrains in traditional VAMP algorithm, leading to the distribution of non-sparse noisy estimation in VAMP deep unfolding unknown, and its distribution parameter unable to be obtained directly using method of traditional VAMP, which prevents the application of VAMP deep unfolding in radar constant false alarm rate (CFAR) detection. To address this problem, we explore the distribution of the non-sparse noisy estimation and propose a parameter convergence detector (PCD) to achieve CFAR detection based on VAMP deep unfolding. Compared to the state-of-the-art methods, PCD leverages not only the sparse solution, but also the non-sparse noisy estimation, which is used to iteratively estimate the distribution parameter and served as the test statistic in detection process. In this way, the proposed algorithm takes advantage of both the enhanced sparse recovery accuracy from deep unfolding and the distribution property of VAMP, thereby achieving superior CFAR detection performance. Additionally, the PCD requires no information about the power of AWGN in the environment, which is more suitable for practical application. The convergence performance and effectiveness of the proposed PCD are analyzed based on the Banach Fixed-Point Theorem. Numerical simulations and practical data experiments demonstrate that PCD can achieve better false alarm control and target detection performance.
A Novel Radar Constant False Alarm Rate Detection Algorithm Based on VAMP Deep Unfolding
Apr 14, 2025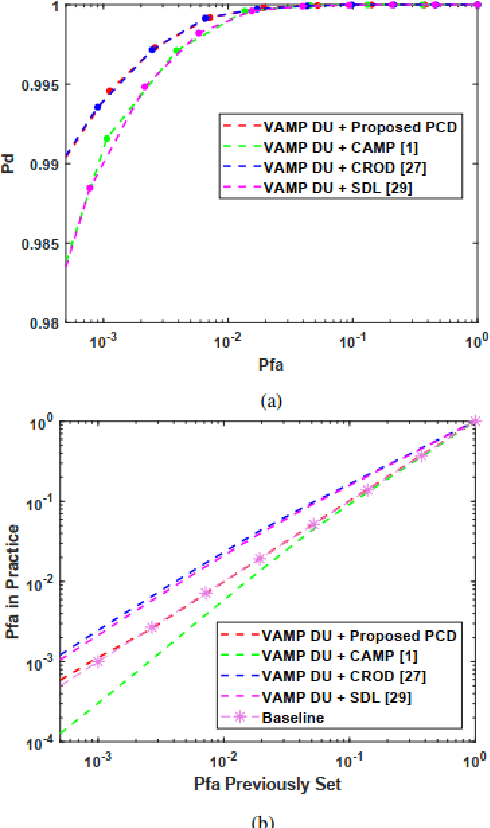
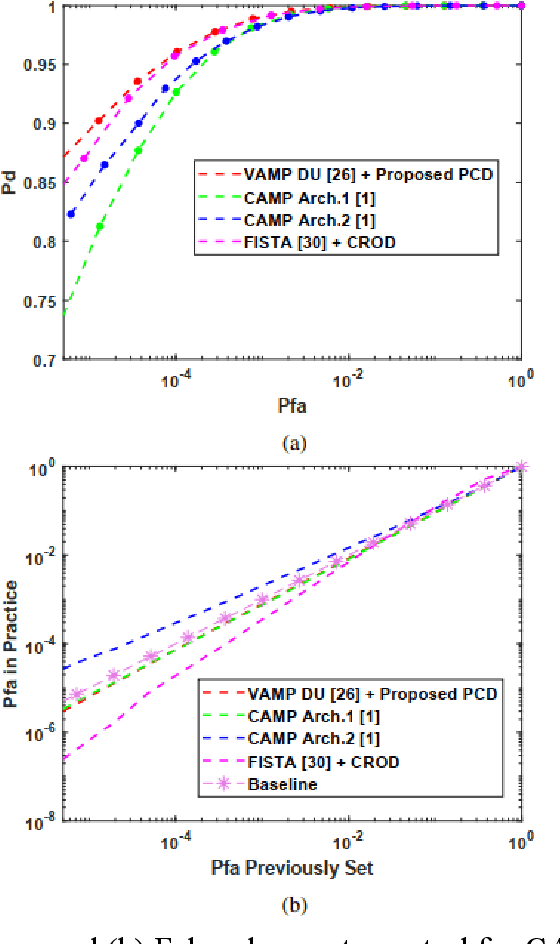
The combination of deep unfolding with vector approximate message passing (VAMP) algorithm, results in faster convergence and higher sparse recovery accuracy than traditional compressive sensing approaches. However, deep unfolding alters the parameters in traditional VAMP algorithm, resulting in the unattainable distribution parameter of the recovery error of non-sparse noisy estimation via traditional VAMP, which hinders the utilization of VAMP deep unfolding in constant false alarm rate (CFAR) detection in sub-Nyquist radar system. Based on VAMP deep unfolding, we provide a parameter convergence detector (PCD) to estimate the recovery error distribution parameter and implement CFAR detection. Compared to the state-of-the-art approaches, both the sparse solution and non-sparse noisy estimation are utilized to estimate the distribution parameter and implement CFAR detection in PCD, which leverages both the VAMP distribution property and the improved sparse recovery accuracy provided by deep unfolding. Simulation results indicate that PCD offers improved false alarm rate control performance and higher target detection rate.
MARS: Memory-Enhanced Agents with Reflective Self-improvement
Mar 25, 2025Large language models (LLMs) have made significant advances in the field of natural language processing, but they still face challenges such as continuous decision-making, lack of long-term memory, and limited context windows in dynamic environments. To address these issues, this paper proposes an innovative framework Memory-Enhanced Agents with Reflective Self-improvement. The MARS framework comprises three agents: the User, the Assistant, and the Checker. By integrating iterative feedback, reflective mechanisms, and a memory optimization mechanism based on the Ebbinghaus forgetting curve, it significantly enhances the agents capabilities in handling multi-tasking and long-span information.
PromptLNet: Region-Adaptive Aesthetic Enhancement via Prompt Guidance in Low-Light Enhancement Net
Mar 11, 2025Learning and improving large language models through human preference feedback has become a mainstream approach, but it has rarely been applied to the field of low-light image enhancement. Existing low-light enhancement evaluations typically rely on objective metrics (such as FID, PSNR, etc.), which often result in models that perform well objectively but lack aesthetic quality. Moreover, most low-light enhancement models are primarily designed for global brightening, lacking detailed refinement. Therefore, the generated images often require additional local adjustments, leading to research gaps in practical applications. To bridge this gap, we propose the following innovations: 1) We collect human aesthetic evaluation text pairs and aesthetic scores from multiple low-light image datasets (e.g., LOL, LOL2, LOM, DCIM, MEF, etc.) to train a low-light image aesthetic evaluation model, supplemented by an optimization algorithm designed to fine-tune the diffusion model. 2) We propose a prompt-driven brightness adjustment module capable of performing fine-grained brightness and aesthetic adjustments for specific instances or regions. 3) We evaluate our method alongside existing state-of-the-art algorithms on mainstream benchmarks. Experimental results show that our method not only outperforms traditional methods in terms of visual quality but also provides greater flexibility and controllability, paving the way for improved aesthetic quality.
TSCnet: A Text-driven Semantic-level Controllable Framework for Customized Low-Light Image Enhancement
Mar 11, 2025



Deep learning-based image enhancement methods show significant advantages in reducing noise and improving visibility in low-light conditions. These methods are typically based on one-to-one mapping, where the model learns a direct transformation from low light to specific enhanced images. Therefore, these methods are inflexible as they do not allow highly personalized mapping, even though an individual's lighting preferences are inherently personalized. To overcome these limitations, we propose a new light enhancement task and a new framework that provides customized lighting control through prompt-driven, semantic-level, and quantitative brightness adjustments. The framework begins by leveraging a Large Language Model (LLM) to understand natural language prompts, enabling it to identify target objects for brightness adjustments. To localize these target objects, the Retinex-based Reasoning Segment (RRS) module generates precise target localization masks using reflection images. Subsequently, the Text-based Brightness Controllable (TBC) module adjusts brightness levels based on the generated illumination map. Finally, an Adaptive Contextual Compensation (ACC) module integrates multi-modal inputs and controls a conditional diffusion model to adjust the lighting, ensuring seamless and precise enhancements accurately. Experimental results on benchmark datasets demonstrate our framework's superior performance at increasing visibility, maintaining natural color balance, and amplifying fine details without creating artifacts. Furthermore, its robust generalization capabilities enable complex semantic-level lighting adjustments in diverse open-world environments through natural language interactions.
Learning Generalizable Language-Conditioned Cloth Manipulation from Long Demonstrations
Mar 06, 2025Multi-step cloth manipulation is a challenging problem for robots due to the high-dimensional state spaces and the dynamics of cloth. Despite recent significant advances in end-to-end imitation learning for multi-step cloth manipulation skills, these methods fail to generalize to unseen tasks. Our insight in tackling the challenge of generalizable multi-step cloth manipulation is decomposition. We propose a novel pipeline that autonomously learns basic skills from long demonstrations and composes learned basic skills to generalize to unseen tasks. Specifically, our method first discovers and learns basic skills from the existing long demonstration benchmark with the commonsense knowledge of a large language model (LLM). Then, leveraging a high-level LLM-based task planner, these basic skills can be composed to complete unseen tasks. Experimental results demonstrate that our method outperforms baseline methods in learning multi-step cloth manipulation skills for both seen and unseen tasks.
D3-ARM: High-Dynamic, Dexterous and Fully Decoupled Cable-driven Robotic Arm
Feb 18, 2025



Cable transmission enables motors of robotic arm to operate lightweight and low-inertia joints remotely in various environments, but it also creates issues with motion coupling and cable routing that can reduce arm's control precision and performance. In this paper, we present a novel motion decoupling mechanism with low-friction to align the cables and efficiently transmit the motor's power. By arranging these mechanisms at the joints, we fabricate a fully decoupled and lightweight cable-driven robotic arm called D3-Arm with all the electrical components be placed at the base. Its 776 mm length moving part boasts six degrees of freedom (DOF) and only 1.6 kg weights. To address the issue of cable slack, a cable-pretension mechanism is integrated to enhance the stability of long-distance cable transmission. Through a series of comprehensive tests, D3-Arm demonstrated 1.29 mm average positioning error and 2.0 kg payload capacity, proving the practicality of the proposed decoupling mechanisms in cable-driven robotic arm.
Leveraging Reasoning with Guidelines to Elicit and Utilize Knowledge for Enhancing Safety Alignment
Feb 06, 2025



Training safe LLMs is one of the most critical research challenge. However, the commonly used method, Refusal Training (RT), struggles to generalize against various OOD jailbreaking attacks. Many safety training methods have been proposed to address this issue. While they offer valuable insights, we aim to complement this line of research by investigating whether OOD attacks truly exceed the capability of RT model. Conducting evaluation with BoN, we observe significant improvements on generalization as N increases. This underscores that the model possesses sufficient safety-related latent knowledge, but RT fails to consistently elicit this knowledge when addressing OOD attacks. Further analysis based on domain adaptation reveals that training with direct refusal causes model to rely on superficial shortcuts, resulting in learning of non-robust representation mappings. Based on our findings, we propose training model to perform safety reasoning for each query. Reasoning supervision encourages model to perform more computations, explicitly eliciting and using latent knowledge through reasoning. To achieve this, we synthesize reasoning supervision based on pre-guidelines, training the model to reason in alignment with them, thereby effectively eliciting and utilizing latent knowledge from diverse perspectives. Extensive experiments show that our method significantly improves generalization performance against OOD attacks.
Enhancing Intent Understanding for Ambiguous Prompts through Human-Machine Co-Adaptation
Jan 25, 2025



Modern image generation systems can produce high-quality visuals, yet user prompts often contain ambiguities, requiring multiple revisions. Existing methods struggle to address the nuanced needs of non-expert users. We propose Visual Co-Adaptation (VCA), a novel framework that iteratively refines prompts and aligns generated images with user preferences. VCA employs a fine-tuned language model with reinforcement learning and multi-turn dialogues for prompt disambiguation. Key components include the Incremental Context-Enhanced Dialogue Block for interactive clarification, the Semantic Exploration and Disambiguation Module (SESD) leveraging Retrieval-Augmented Generation (RAG) and CLIP scoring, and the Pixel Precision and Consistency Optimization Module (PPCO) for refining image details using Proximal Policy Optimization (PPO). A human-in-the-loop feedback mechanism further improves performance. Experiments show that VCA surpasses models like DALL-E 3 and Stable Diffusion, reducing dialogue rounds to 4.3, achieving a CLIP score of 0.92, and enhancing user satisfaction to 4.73/5. Additionally, we introduce a novel multi-round dialogue dataset with prompt-image pairs and user intent annotations.
Enhancing Low-Cost Video Editing with Lightweight Adaptors and Temporal-Aware Inversion
Jan 08, 2025



Recent advancements in text-to-image (T2I) generation using diffusion models have enabled cost-effective video-editing applications by leveraging pre-trained models, eliminating the need for resource-intensive training. However, the frame-independence of T2I generation often results in poor temporal consistency. Existing methods address this issue through temporal layer fine-tuning or inference-based temporal propagation, but these approaches suffer from high training costs or limited temporal coherence. To address these challenges, we propose a General and Efficient Adapter (GE-Adapter) that integrates temporal-spatial and semantic consistency with Baliteral DDIM inversion. This framework introduces three key components: (1) Frame-based Temporal Consistency Blocks (FTC Blocks) to capture frame-specific features and enforce smooth inter-frame transitions via temporally-aware loss functions; (2) Channel-dependent Spatial Consistency Blocks (SCD Blocks) employing bilateral filters to enhance spatial coherence by reducing noise and artifacts; and (3) Token-based Semantic Consistency Module (TSC Module) to maintain semantic alignment using shared prompt tokens and frame-specific tokens. Our method significantly improves perceptual quality, text-image alignment, and temporal coherence, as demonstrated on the MSR-VTT dataset. Additionally, it achieves enhanced fidelity and frame-to-frame coherence, offering a practical solution for T2V editing.