 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRAM: Generalization in Deep RL with a Robust Adaptation Module
Dec 05, 2024



The reliable deployment of deep reinforcement learning in real-world settings requires the ability to generalize across a variety of conditions, including both in-distribution scenarios seen during training as well as novel out-of-distribution scenarios. In this work, we present a framework for dynamics generalization in deep reinforcement learning that unifies these two distinct types of generalization within a single architecture. We introduce a robust adaptation module that provides a mechanism for identifying and reacting to both in-distribution and out-of-distribution environment dynamics, along with a joint training pipeline that combines the goals of in-distribution adaptation and out-of-distribution robustness. Our algorithm GRAM achieves strong generalization performance across in-distribution and out-of-distribution scenarios upon deployment, which we demonstrate on a variety of realistic simulated locomotion tasks with a quadruped robot.
PIETRA: Physics-Informed Evidential Learning for Traversing Out-of-Distribution Terrain
Sep 04, 2024



Self-supervised learning is a powerful approach for developing traversability models for off-road navigation, but these models often struggle with inputs unseen during training. Existing methods utilize techniques like evidential deep learning to quantify model uncertainty, helping to identify and avoid out-of-distribution terrain. However, always avoiding out-of-distribution terrain can be overly conservative, e.g., when novel terrain can be effectively analyzed using a physics-based model. To overcome this challenge, we introduce Physics-Informed Evidential Traversability (PIETRA), a self-supervised learning framework that integrates physics priors directly into the mathematical formulation of evidential neural networks and introduces physics knowledge implicitly through an uncertainty-aware, physics-informed training loss. Our evidential network seamlessly transitions between learned and physics-based predictions for out-of-distribution inputs. Additionally, the physics-informed loss regularizes the learned model, ensuring better alignment with the physics model. Extensive simulations and hardware experiments demonstrate that PIETRA improves both learning accuracy and navigation performance in environments with significant distribution shifts.
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory Planning
May 02, 2024



Traditional optimization-based planners, while effective, suffer from high computational costs, resulting in slow trajectory generation. A successful strategy to reduce computation time involves using Imitation Learning (IL) to develop fast neural network (NN) policies from those planners, which are treated as expert demonstrators. Although the resulting NN policies are effective at quickly generating trajectories similar to those from the expert, (1) their output does not explicitly account for dynamic feasibility, and (2) the policies do not accommodate changes in the constraints different from those used during training. To overcome these limitations, we propose Constraint-Guided Diffusion (CGD), a novel IL-based approach to trajectory planning. CGD leverages a hybrid learning/online optimization scheme that combines diffusion policies with a surrogate efficient optimization problem, enabling the generation of collision-free, dynamically feasible trajectories. The key ideas of CGD include dividing the original challenging optimization problem solved by the expert into two more manageable sub-problems: (a) efficiently finding collision-free paths, and (b) determining a dynamically-feasible time-parametrization for those paths to obtain a trajectory. Compared to conventional neural network architectures, we demonstrate through numerical evaluations significant improvements in performance and dynamic feasibility under scenarios with new constraints never encountered during training.
EVORA: Deep Evidential Traversability Learning for Risk-Aware Off-Road Autonomy
Nov 10, 2023



Traversing terrain with good traction is crucial for achieving fast off-road navigation. Instead of manually designing costs based on terrain features, existing methods learn terrain properties directly from data via self-supervision, but challenges remain to properly quantify and mitigate risks due to uncertainties in learned models. This work efficiently quantifies both aleatoric and epistemic uncertainties by learning discrete traction distributions and probability densities of the traction predictor's latent features. Leveraging evidential deep learning, we parameterize Dirichlet distributions with the network outputs and propose a novel uncertainty-aware squared Earth Mover's distance loss with a closed-form expression that improves learning accuracy and navigation performance. The proposed risk-aware planner simulates state trajectories with the worst-case expected traction to handle aleatoric uncertainty, and penalizes trajectories moving through terrain with high epistemic uncertainty. Our approach is extensively validated in simulation and on wheeled and quadruped robots, showing improved navigation performance compared to methods that assume no slip, assume the expected traction, or optimize for the worst-case expected cost.
RAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation
Oct 12, 2022
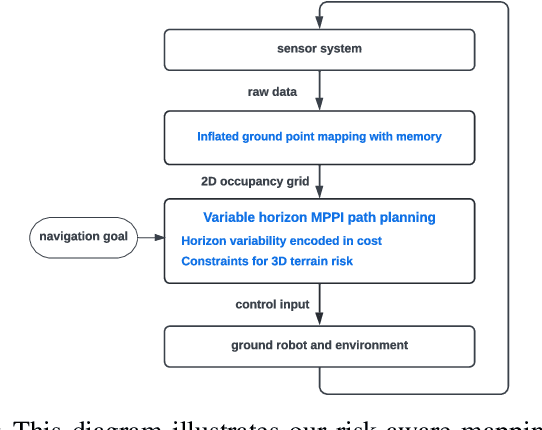
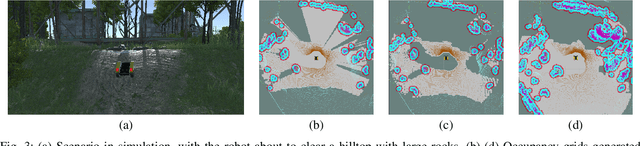
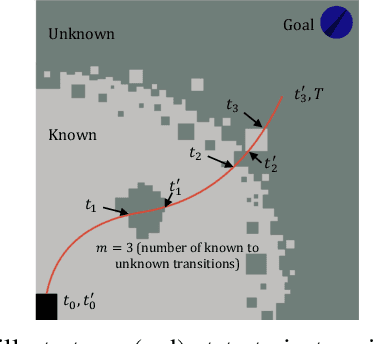
A key challenge in fast ground robot navigation in 3D terrain is balancing robot speed and safety. Recent work has shown that 2.5D maps (2D representations with additional 3D information) are ideal for real-time safe and fast planning. However, raytracing as a prevalent method of generating occupancy grid as the base 2D representation makes the generated map unsafe to plan in, due to inaccurate representation of unknown space. Additionally, existing planners such as MPPI do not reason about speeds in known free and unknown space separately, leading to slow plans. This work therefore first presents ground point inflation as a way to generate accurate occupancy grid maps from classified pointclouds. Then we present an MPPI-based planner with embedded variability in horizon, to maximize speed in known free space while retaining cautionary penetration into unknown space. Finally, we integrate this mapping and planning pipeline with risk constraints arising from 3D terrain, and verify that it enables fast and safe navigation using simulations and a hardware demonstration.
Probabilistic Traversability Model for Risk-Aware Motion Planning in Off-Road Environments
Oct 01, 2022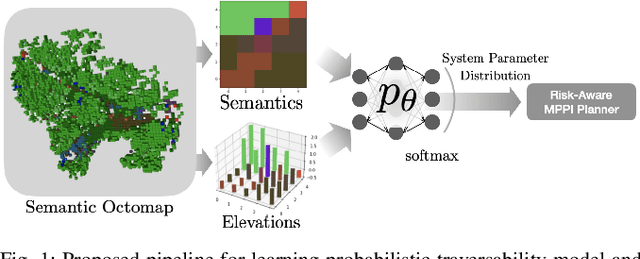
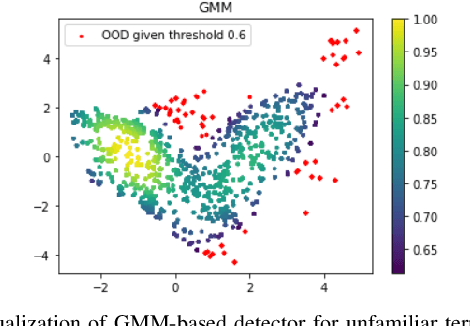
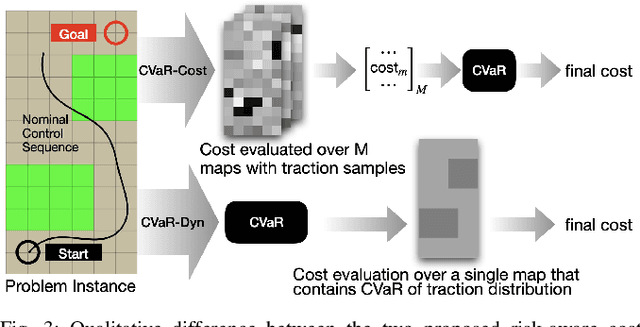
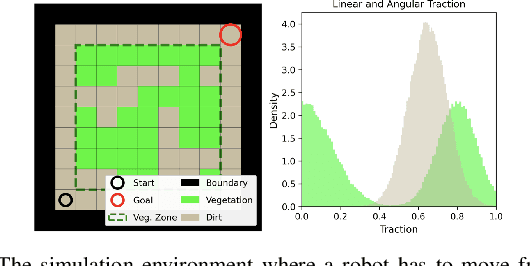
A key challenge in off-road navigation is that even visually similar or semantically identical terrain may have substantially different traction properties. Existing work typically assumes a nominal or expected robot dynamical model for planning, which can lead to degraded performance if the assumed models are not realizable given the terrain properties. In contrast, this work introduces a new probabilistic representation of traversability as a distribution of parameters in the robot's dynamical model that are conditioned on the terrain characteristics. This model is learned in a self-supervised manner by fitting a probability distribution over the parameters identified online, encoded as a neural network that takes terrain features as input. This work then presents two risk-aware planning algorithms that leverage the learned traversability model to plan risk-aware trajectories. Finally, a method for detecting unfamiliar terrain with respect to the training data is introduced based on a Gaussian Mixture Model fit to the latent space of the trained model. Experiments demonstrate that the proposed approach outperforms existing work that assumes nominal or expected robot dynamics in both success rate and completion time for representative navigation tasks. Furthermore, when the proposed approach is deployed in an unseen environment, excluding unfamiliar terrains during planning leads to improved success rate.
Energy-Aware, Collision-Free Information Gathering for Heterogeneous Robot Teams
Jul 30, 2022
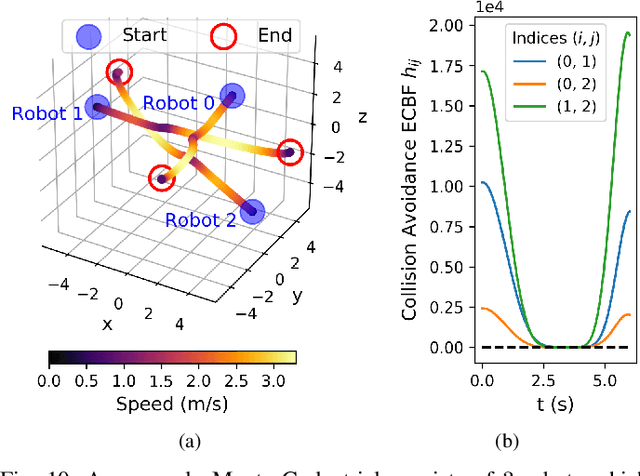
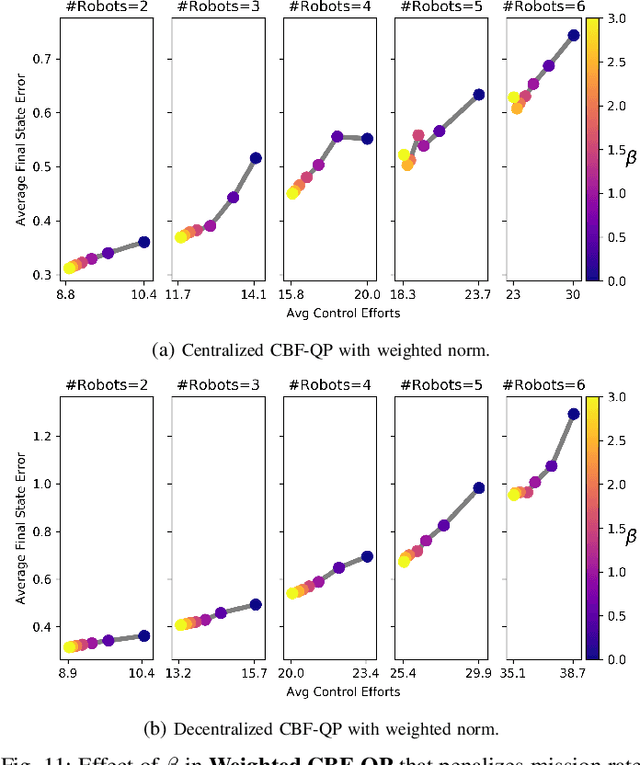
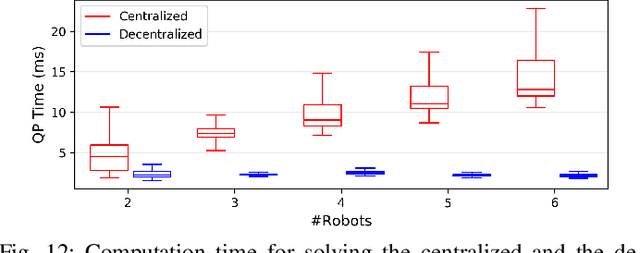
This paper considers the problem of safely coordinating a team of sensor-equipped robots to reduce uncertainty about a dynamical process, where the objective trades off information gain and energy cost. Optimizing this trade-off is desirable, but leads to a non-monotone objective function in the set of robot trajectories. Therefore, common multi-robot planners based on coordinate descent lose their performance guarantees. Furthermore, methods that handle non-monotonicity lose their performance guarantees when subject to inter-robot collision avoidance constraints. As it is desirable to retain both the performance guarantee and safety guarantee, this work proposes a hierarchical approach with a distributed planner that uses local search with a worst-case performance guarantees and a decentralized controller based on control barrier functions that ensures safety and encourages timely arrival at sensing locations. Via extensive simulations, hardware-in-the-loop tests and hardware experiments, we demonstrate that the proposed approach achieves a better trade-off between sensing and energy cost than coordinate descent based algorithms.
Risk-Aware Off-Road Navigation via a Learned Speed Distribution Map
Mar 25, 2022
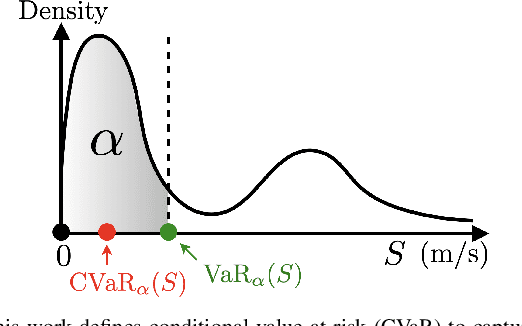
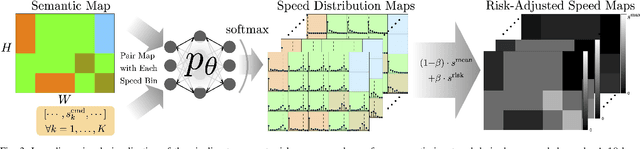
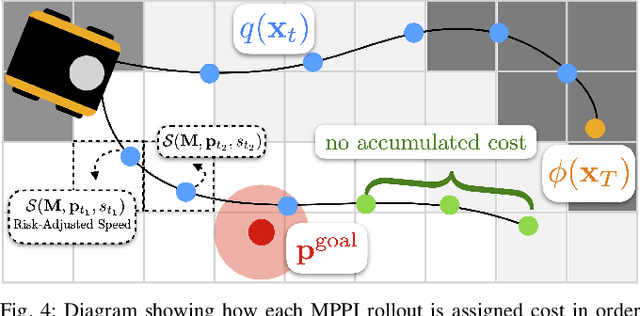
Motion planning in off-road environments requires reasoning about both the geometry and semantics of the scene (e.g., a robot may be able to drive through soft bushes but not a fallen log). In many recent works, the world is classified into a finite number of semantic categories that often are not sufficient to capture the ability (i.e., the speed) with which a robot can traverse off-road terrain. Instead, this work proposes a new representation of traversability based exclusively on robot speed that can be learned from data, offers interpretability and intuitive tuning, and can be easily integrated with a variety of planning paradigms in the form of a costmap. Specifically, given a dataset of experienced trajectories, the proposed algorithm learns to predict a distribution of speeds the robot could achieve, conditioned on the environment semantics and commanded speed. The learned speed distribution map is converted into costmaps with a risk-aware cost term based on conditional value at risk (CVaR). Numerical simulations demonstrate that the proposed risk-aware planning algorithm leads to faster average time-to-goals compared to a method that only considers expected behavior, and the planner can be tuned for slightly slower, but less variable behavior. Furthermore, the approach is integrated into a full autonomy stack and demonstrated in a high-fidelity Unity environment and is shown to provide a 30\% improvement in the success rate of navigation.
A Safety and Passivity Filter for Robot Teleoperation Systems
Feb 17, 2021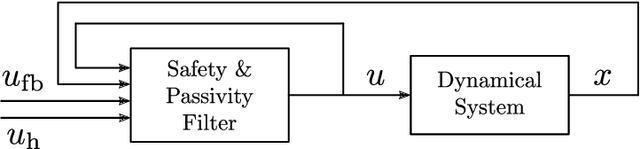
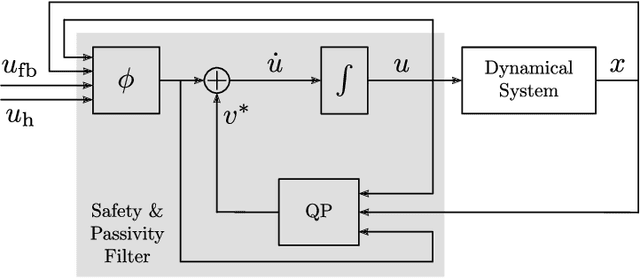
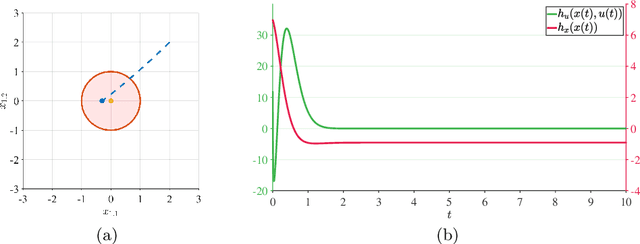
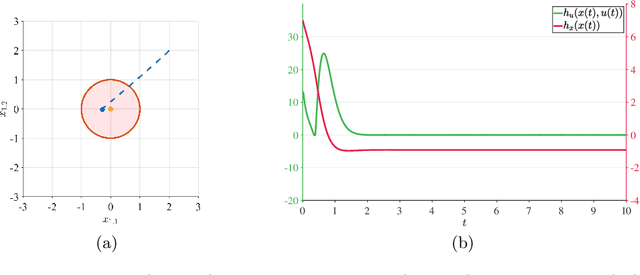
In this paper, we present a way of enforcing safety and passivity properties of robot teleoperation systems, where a human operator interacts with a dynamical system modeling the robot. The approach does so in a holistic fashion, by combining safety and passivity constraints in a single optimization-based controller which effectively filters the desired control input before supplying it to the system. The result is a safety and passivity filter implemented as a convex quadratic program which can be solved efficiently and employed in an online fashion in many robotic teleoperation applications. Simulation results show the benefits of the approach developed in this paper applied to the human teleoperation of a second-order dynamical system.
LION: Lidar-Inertial Observability-Aware Navigator for Vision-Denied Environments
Feb 05, 2021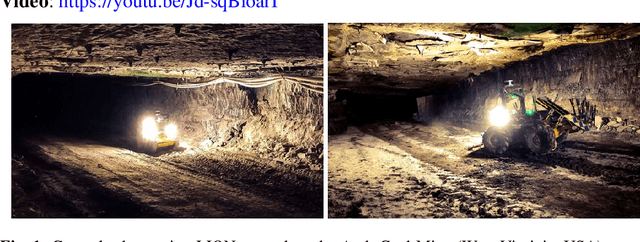
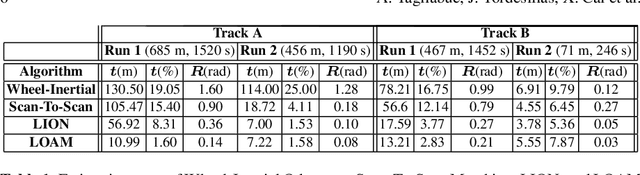
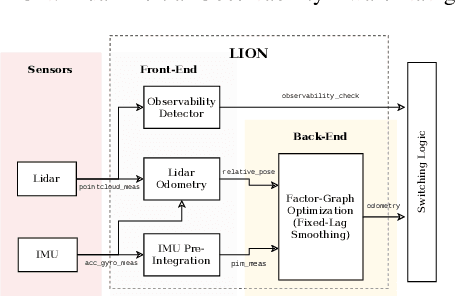
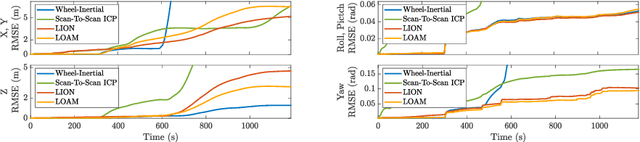
State estimation for robots navigating in GPS-denied and perceptually-degraded environments, such as underground tunnels, mines and planetary subsurface voids, remains challenging in robotics. Towards this goal, we present LION (Lidar-Inertial Observability-Aware Navigator), which is part of the state estimation framework developed by the team CoSTAR for the DARPA Subterranean Challenge, where the team achieved second and first places in the Tunnel and Urban circuits in August 2019 and February 2020, respectively. LION provides high-rate odometry estimates by fusing high-frequency inertial data from an IMU and low-rate relative pose estimates from a lidar via a fixed-lag sliding window smoother. LION does not require knowledge of relative positioning between lidar and IMU, as the extrinsic calibration is estimated online. In addition, LION is able to self-assess its performance using an observability metric that evaluates whether the pose estimate is geometrically ill-constrained. Odometry and confidence estimates are used by HeRO, a supervisory algorithm that provides robust estimates by switching between different odometry sources. In this paper we benchmark the performance of LION in perceptually-degraded subterranean environments, demonstrating its high technology readiness level for deployment in the field.