 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniAudio-Token: Empowering Semantic Speech Tokenizers with General Audio Perception
May 29, 2026Semantic speech tokenizers have become a widely used interface for Audio-LLMs, owing to their compact single-codebook design and strong linguistic alignment. However, their focus on linguistic abstraction induces acoustic blindness, limiting their applicability beyond speech-centric tasks. We propose UniAudio-Token, a framework that empowers semantic tokenizers with general audio perception without compromising speech ability. Instead of altering the semantic paradigm, UniAudio-Token mitigates its information loss through two key innovations: (1) Semantic-Acoustic Primitives (SAP) provide structured supervision by decomposing audio into linguistic content, vocal attributes, and auditory-scene primitives; and (2) Semantic-Acoustic Equilibrium (SAE) introduces a content-aware gating mechanism that adaptively restores fine-grained acoustic details from shallow layers. Extensive evaluations show that UniAudio-Token learns comprehensive universal representations while preserving high-fidelity speech generation. When integrated with downstream LLMs, it outperforms all single-codebook baseline tokenizers on both understanding and generation tasks, effectively serving as a unified audio interface. We publicly release all our code, including training and inference scripts, together with the model checkpoints at https://github.com/Tencent/Universal_Audio_Tokenizer.
Beyond Transcription: Unified Audio Schema for Perception-Aware AudioLLMs
Apr 14, 2026Recent Audio Large Language Models (AudioLLMs) exhibit a striking performance inversion: while excelling at complex reasoning tasks, they consistently underperform on fine-grained acoustic perception. We attribute this gap to a fundamental limitation of ASR-centric training, which provides precise linguistic targets but implicitly teaches models to suppress paralinguistic cues and acoustic events as noise. To address this, we propose Unified Audio Schema (UAS), a holistic and structured supervision framework that organizes audio information into three explicit components -- Transcription, Paralinguistics, and Non-linguistic Events -- within a unified JSON format. This design achieves comprehensive acoustic coverage without sacrificing the tight audio-text alignment that enables reasoning. We validate the effectiveness of this supervision strategy by applying it to both discrete and continuous AudioLLM architectures. Extensive experiments on MMSU, MMAR, and MMAU demonstrate that UAS-Audio yields consistent improvements, boosting fine-grained perception by 10.9% on MMSU over the same-size state-of-the-art models while preserving robust reasoning capabilities. Our code and model are publicly available at https://github.com/Tencent/Unified_Audio_Schema.
HISR: Hindsight Information Modulated Segmental Process Rewards For Multi-turn Agentic Reinforcement Learning
Mar 19, 2026While large language models excel in diverse domains, their performance on complex longhorizon agentic decision-making tasks remains limited. Most existing methods concentrate on designing effective reward models (RMs) to advance performance via multi-turn reinforcement learning. However, they suffer from delayed propagation in sparse outcome rewards and unreliable credit assignment with potentially overly fine-grained and unfocused turnlevel process rewards. In this paper, we propose (HISR) exploiting Hindsight Information to modulate Segmental process Rewards, which closely aligns rewards with sub-goals and underscores significant segments to enhance the reliability of credit assignment. Specifically, a segment-level process RM is presented to assign rewards for each sub-goal in the task, avoiding excessively granular allocation to turns. To emphasize significant segments in the trajectory, a hindsight model is devised to reflect the preference of performing a certain action after knowing the trajectory outcome. With this characteristic, we design the ratios of sequence likelihoods between hindsight and policy model to measure action importance. The ratios are subsequently employed to aggregate segment importance scores, which in turn modulate segmental process rewards, enhancing credit assignment reliability. Extensive experimental results on three publicly benchmarks demonstrate the validity of our method.
WeDLM: Reconciling Diffusion Language Models with Standard Causal Attention for Fast Inference
Dec 28, 2025Autoregressive (AR) generation is the standard decoding paradigm for Large Language Models (LLMs), but its token-by-token nature limits parallelism at inference time. Diffusion Language Models (DLLMs) offer parallel decoding by recovering multiple masked tokens per step; however, in practice they often fail to translate this parallelism into deployment speed gains over optimized AR engines (e.g., vLLM). A key reason is that many DLLMs rely on bidirectional attention, which breaks standard prefix KV caching and forces repeated contextualization, undermining efficiency. We propose WeDLM, a diffusion decoding framework built entirely on standard causal attention to make parallel generation prefix-cache friendly. The core idea is to let each masked position condition on all currently observed tokens while keeping a strict causal mask, achieved by Topological Reordering that moves observed tokens to the physical prefix while preserving their logical positions. Building on this property, we introduce a streaming decoding procedure that continuously commits confident tokens into a growing left-to-right prefix and maintains a fixed parallel workload, avoiding the stop-and-wait behavior common in block diffusion methods. Experiments show that WeDLM preserves the quality of strong AR backbones while delivering substantial speedups, approaching 3x on challenging reasoning benchmarks and up to 10x in low-entropy generation regimes; critically, our comparisons are against AR baselines served by vLLM under matched deployment settings, demonstrating that diffusion-style decoding can outperform an optimized AR engine in practice.
A Domain-Adapted Pipeline for Structured Information Extraction from Police Incident Announcements on Social Media
Dec 18, 2025Structured information extraction from police incident announcements is crucial for timely and accurate data processing, yet presents considerable challenges due to the variability and informal nature of textual sources such as social media posts. To address these challenges, we developed a domain-adapted extraction pipeline that leverages targeted prompt engineering with parameter-efficient fine-tuning of the Qwen2.5-7B model using Low-Rank Adaptation (LoRA). This approach enables the model to handle noisy, heterogeneous text while reliably extracting 15 key fields, including location, event characteristics, and impact assessment, from a high-quality, manually annotated dataset of 4,933 instances derived from 27,822 police briefing posts on Chinese Weibo (2019-2020). Experimental results demonstrated that LoRA-based fine-tuning significantly improved performance over both the base and instruction-tuned models, achieving an accuracy exceeding 98.36% for mortality detection and Exact Match Rates of 95.31% for fatality counts and 95.54% for province-level location extraction. The proposed pipeline thus provides a validated and efficient solution for multi-task structured information extraction in specialized domains, offering a practical framework for transforming unstructured text into reliable structured data in social science research.
Virtual Width Networks
Nov 17, 2025



We introduce Virtual Width Networks (VWN), a framework that delivers the benefits of wider representations without incurring the quadratic cost of increasing the hidden size. VWN decouples representational width from backbone width, expanding the embedding space while keeping backbone compute nearly constant. In our large-scale experiment, an 8-times expansion accelerates optimization by over 2 times for next-token and 3 times for next-2-token prediction. The advantage amplifies over training as both the loss gap grows and the convergence-speedup ratio increases, showing that VWN is not only token-efficient but also increasingly effective with scale. Moreover, we identify an approximately log-linear scaling relation between virtual width and loss reduction, offering an initial empirical basis and motivation for exploring virtual-width scaling as a new dimension of large-model efficiency.
StableToken: A Noise-Robust Semantic Speech Tokenizer for Resilient SpeechLLMs
Sep 26, 2025



Prevalent semantic speech tokenizers, designed to capture linguistic content, are surprisingly fragile. We find they are not robust to meaning-irrelevant acoustic perturbations; even at high Signal-to-Noise Ratios (SNRs) where speech is perfectly intelligible, their output token sequences can change drastically, increasing the learning burden for downstream LLMs. This instability stems from two flaws: a brittle single-path quantization architecture and a distant training signal indifferent to intermediate token stability. To address this, we introduce StableToken, a tokenizer that achieves stability through a consensus-driven mechanism. Its multi-branch architecture processes audio in parallel, and these representations are merged via a powerful bit-wise voting mechanism to form a single, stable token sequence. StableToken sets a new state-of-the-art in token stability, drastically reducing Unit Edit Distance (UED) under diverse noise conditions. This foundational stability translates directly to downstream benefits, significantly improving the robustness of SpeechLLMs on a variety of tasks.
LatticeWorld: A Multimodal Large Language Model-Empowered Framework for Interactive Complex World Generation
Sep 05, 2025



Recent research has been increasingly focusing on developing 3D world models that simulate complex real-world scenarios. World models have found broad applications across various domains, including embodied AI, autonomous driving, entertainment, etc. A more realistic simulation with accurate physics will effectively narrow the sim-to-real gap and allow us to gather rich information about the real world conveniently. While traditional manual modeling has enabled the creation of virtual 3D scenes, modern approaches have leveraged advanced machine learning algorithms for 3D world generation, with most recent advances focusing on generative methods that can create virtual worlds based on user instructions. This work explores such a research direction by proposing LatticeWorld, a simple yet effective 3D world generation framework that streamlines the industrial production pipeline of 3D environments. LatticeWorld leverages lightweight LLMs (LLaMA-2-7B) alongside the industry-grade rendering engine (e.g., Unreal Engine 5) to generate a dynamic environment. Our proposed framework accepts textual descriptions and visual instructions as multimodal inputs and creates large-scale 3D interactive worlds with dynamic agents, featuring competitive multi-agent interaction, high-fidelity physics simulation, and real-time rendering. We conduct comprehensive experiments to evaluate LatticeWorld, showing that it achieves superior accuracy in scene layout generation and visual fidelity. Moreover, LatticeWorld achieves over a $90\times$ increase in industrial production efficiency while maintaining high creative quality compared with traditional manual production methods. Our demo video is available at https://youtu.be/8VWZXpERR18
GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning
Jul 02, 2025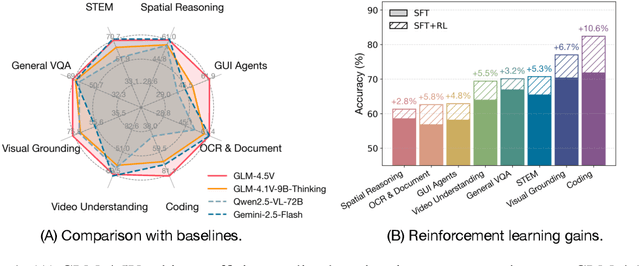
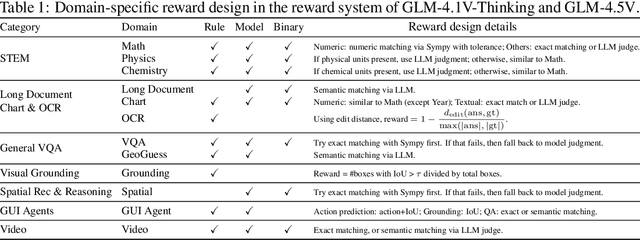
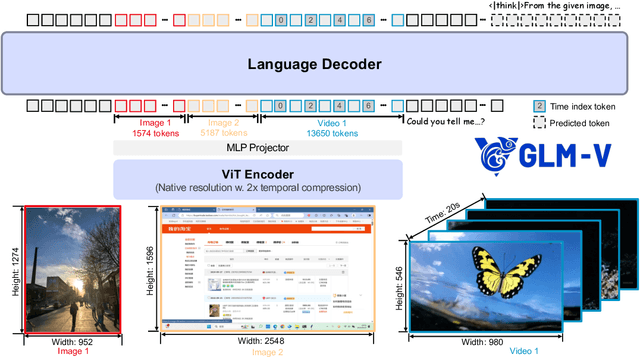

We present GLM-4.1V-Thinking, a vision-language model (VLM) designed to advance general-purpose multimodal understanding and reasoning. In this report, we share our key findings in the development of the reasoning-centric training framework. We first develop a capable vision foundation model with significant potential through large-scale pre-training, which arguably sets the upper bound for the final performance. We then propose Reinforcement Learning with Curriculum Sampling (RLCS) to unlock the full potential of the model, leading to comprehensive capability enhancement across a diverse range of tasks, including STEM problem solving, video understanding, content recognition, coding, grounding, GUI-based agents, and long document understanding. We open-source GLM-4.1V-9B-Thinking, which achieves state-of-the-art performance among models of comparable size. In a comprehensive evaluation across 28 public benchmarks, our model outperforms Qwen2.5-VL-7B on nearly all tasks and achieves comparable or even superior performance on 18 benchmarks relative to the significantly larger Qwen2.5-VL-72B. Notably, GLM-4.1V-9B-Thinking also demonstrates competitive or superior performance compared to closed-source models such as GPT-4o on challenging tasks including long document understanding and STEM reasoning, further underscoring its strong capabilities. Code, models and more information are released at https://github.com/THUDM/GLM-4.1V-Thinking.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)