 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Reason for Factuality
Aug 07, 2025Reasoning Large Language Models (R-LLMs) have significantly advanced complex reasoning tasks but often struggle with factuality, generating substantially more hallucinations than their non-reasoning counterparts on long-form factuality benchmarks. However, extending online Reinforcement Learning (RL), a key component in recent R-LLM advancements, to the long-form factuality setting poses several unique challenges due to the lack of reliable verification methods. Previous work has utilized automatic factuality evaluation frameworks such as FActScore to curate preference data in the offline RL setting, yet we find that directly leveraging such methods as the reward in online RL leads to reward hacking in multiple ways, such as producing less detailed or relevant responses. We propose a novel reward function that simultaneously considers the factual precision, response detail level, and answer relevance, and applies online RL to learn high quality factual reasoning. Evaluated on six long-form factuality benchmarks, our factual reasoning model achieves an average reduction of 23.1 percentage points in hallucination rate, a 23% increase in answer detail level, and no degradation in the overall response helpfulness.
Locate 3D: Real-World Object Localization via Self-Supervised Learning in 3D
Apr 19, 2025We present LOCATE 3D, a model for localizing objects in 3D scenes from referring expressions like "the small coffee table between the sofa and the lamp." LOCATE 3D sets a new state-of-the-art on standard referential grounding benchmarks and showcases robust generalization capabilities. Notably, LOCATE 3D operates directly on sensor observation streams (posed RGB-D frames), enabling real-world deployment on robots and AR devices. Key to our approach is 3D-JEPA, a novel self-supervised learning (SSL) algorithm applicable to sensor point clouds. It takes as input a 3D pointcloud featurized using 2D foundation models (CLIP, DINO). Subsequently, masked prediction in latent space is employed as a pretext task to aid the self-supervised learning of contextualized pointcloud features. Once trained, the 3D-JEPA encoder is finetuned alongside a language-conditioned decoder to jointly predict 3D masks and bounding boxes. Additionally, we introduce LOCATE 3D DATASET, a new dataset for 3D referential grounding, spanning multiple capture setups with over 130K annotations. This enables a systematic study of generalization capabilities as well as a stronger model.
LIFT-GS: Cross-Scene Render-Supervised Distillation for 3D Language Grounding
Feb 27, 2025Our approach to training 3D vision-language understanding models is to train a feedforward model that makes predictions in 3D, but never requires 3D labels and is supervised only in 2D, using 2D losses and differentiable rendering. The approach is new for vision-language understanding. By treating the reconstruction as a ``latent variable'', we can render the outputs without placing unnecessary constraints on the network architecture (e.g. can be used with decoder-only models). For training, only need images and camera pose, and 2D labels. We show that we can even remove the need for 2D labels by using pseudo-labels from pretrained 2D models. We demonstrate this to pretrain a network, and we finetune it for 3D vision-language understanding tasks. We show this approach outperforms baselines/sota for 3D vision-language grounding, and also outperforms other 3D pretraining techniques. Project page: https://liftgs.github.io.
Memory Layers at Scale
Dec 12, 2024



Memory layers use a trainable key-value lookup mechanism to add extra parameters to a model without increasing FLOPs. Conceptually, sparsely activated memory layers complement compute-heavy dense feed-forward layers, providing dedicated capacity to store and retrieve information cheaply. This work takes memory layers beyond proof-of-concept, proving their utility at contemporary scale. On downstream tasks, language models augmented with our improved memory layer outperform dense models with more than twice the computation budget, as well as mixture-of-expert models when matched for both compute and parameters. We find gains are especially pronounced for factual tasks. We provide a fully parallelizable memory layer implementation, demonstrating scaling laws with up to 128B memory parameters, pretrained to 1 trillion tokens, comparing to base models with up to 8B parameters.
Habitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.
What do we learn from a large-scale study of pre-trained visual representations in sim and real environments?
Oct 03, 2023



We present a large empirical investigation on the use of pre-trained visual representations (PVRs) for training downstream policies that execute real-world tasks. Our study spans five different PVRs, two different policy-learning paradigms (imitation and reinforcement learning), and three different robots for 5 distinct manipulation and indoor navigation tasks. From this effort, we can arrive at three insights: 1) the performance trends of PVRs in the simulation are generally indicative of their trends in the real world, 2) the use of PVRs enables a first-of-its-kind result with indoor ImageNav (zero-shot transfer to a held-out scene in the real world), and 3) the benefits from variations in PVRs, primarily data-augmentation and fine-tuning, also transfer to the real-world performance. See project website for additional details and visuals.
Galactic: Scaling End-to-End Reinforcement Learning for Rearrangement at 100k Steps-Per-Second
Jun 13, 2023



We present Galactic, a large-scale simulation and reinforcement-learning (RL) framework for robotic mobile manipulation in indoor environments. Specifically, a Fetch robot (equipped with a mobile base, 7DoF arm, RGBD camera, egomotion, and onboard sensing) is spawned in a home environment and asked to rearrange objects - by navigating to an object, picking it up, navigating to a target location, and then placing the object at the target location. Galactic is fast. In terms of simulation speed (rendering + physics), Galactic achieves over 421,000 steps-per-second (SPS) on an 8-GPU node, which is 54x faster than Habitat 2.0 (7699 SPS). More importantly, Galactic was designed to optimize the entire rendering + physics + RL interplay since any bottleneck in the interplay slows down training. In terms of simulation+RL speed (rendering + physics + inference + learning), Galactic achieves over 108,000 SPS, which 88x faster than Habitat 2.0 (1243 SPS). These massive speed-ups not only drastically cut the wall-clock training time of existing experiments, but also unlock an unprecedented scale of new experiments. First, Galactic can train a mobile pick skill to >80% accuracy in under 16 minutes, a 100x speedup compared to the over 24 hours it takes to train the same skill in Habitat 2.0. Second, we use Galactic to perform the largest-scale experiment to date for rearrangement using 5B steps of experience in 46 hours, which is equivalent to 20 years of robot experience. This scaling results in a single neural network composed of task-agnostic components achieving 85% success in GeometricGoal rearrangement, compared to 0% success reported in Habitat 2.0 for the same approach. The code is available at github.com/facebookresearch/galactic.
Where are we in the search for an Artificial Visual Cortex for Embodied Intelligence?
Mar 31, 2023



We present the largest and most comprehensive empirical study of pre-trained visual representations (PVRs) or visual 'foundation models' for Embodied AI. First, we curate CortexBench, consisting of 17 different tasks spanning locomotion, navigation, dexterous, and mobile manipulation. Next, we systematically evaluate existing PVRs and find that none are universally dominant. To study the effect of pre-training data scale and diversity, we combine over 4,000 hours of egocentric videos from 7 different sources (over 5.6M images) and ImageNet to train different-sized vision transformers using Masked Auto-Encoding (MAE) on slices of this data. Contrary to inferences from prior work, we find that scaling dataset size and diversity does not improve performance universally (but does so on average). Our largest model, named VC-1, outperforms all prior PVRs on average but does not universally dominate either. Finally, we show that task or domain-specific adaptation of VC-1 leads to substantial gains, with VC-1 (adapted) achieving competitive or superior performance than the best known results on all of the benchmarks in CortexBench. These models required over 10,000 GPU-hours to train and can be found on our website for the benefit of the research community.
Offline Visual Representation Learning for Embodied Navigation
Apr 27, 2022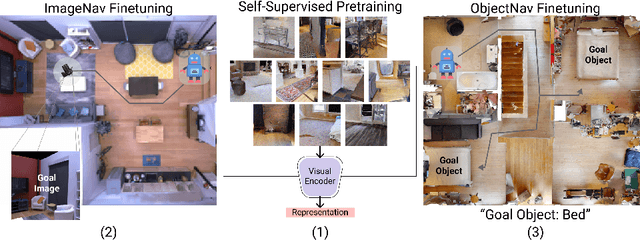
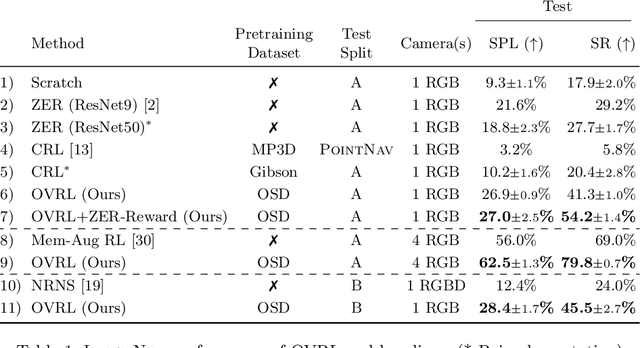
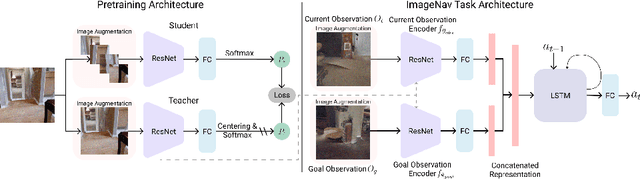
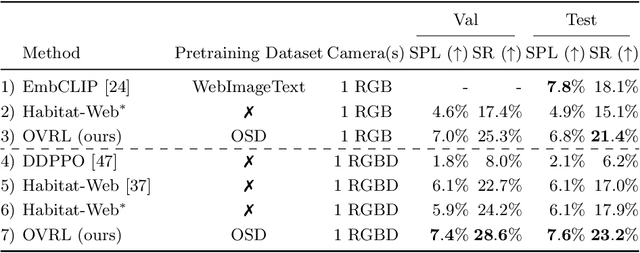
How should we learn visual representations for embodied agents that must see and move? The status quo is tabula rasa in vivo, i.e. learning visual representations from scratch while also learning to move, potentially augmented with auxiliary tasks (e.g. predicting the action taken between two successive observations). In this paper, we show that an alternative 2-stage strategy is far more effective: (1) offline pretraining of visual representations with self-supervised learning (SSL) using large-scale pre-rendered images of indoor environments (Omnidata), and (2) online finetuning of visuomotor representations on specific tasks with image augmentations under long learning schedules. We call this method Offline Visual Representation Learning (OVRL). We conduct large-scale experiments - on 3 different 3D datasets (Gibson, HM3D, MP3D), 2 tasks (ImageNav, ObjectNav), and 2 policy learning algorithms (RL, IL) - and find that the OVRL representations lead to significant across-the-board improvements in state of art, on ImageNav from 29.2% to 54.2% (+25% absolute, 86% relative) and on ObjectNav from 18.1% to 23.2% (+5.1% absolute, 28% relative). Importantly, both results were achieved by the same visual encoder generalizing to datasets that were not seen during pretraining. While the benefits of pretraining sometimes diminish (or entirely disappear) with long finetuning schedules, we find that OVRL's performance gains continue to increase (not decrease) as the agent is trained for 2 billion frames of experience.
On the Use and Misuse of Absorbing States in Multi-agent Reinforcement Learning
Nov 10, 2021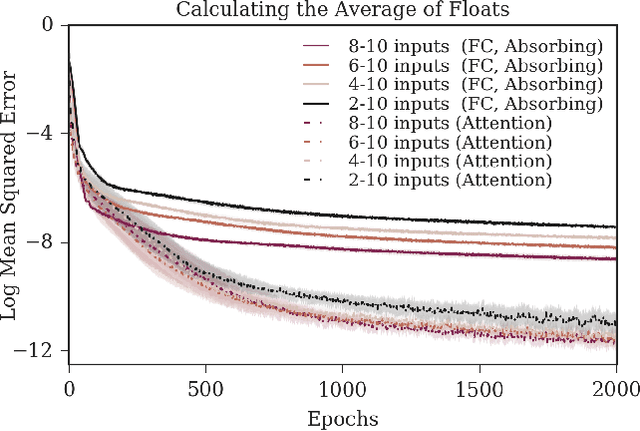

The creation and destruction of agents in cooperative multi-agent reinforcement learning (MARL) is a critically under-explored area of research. Current MARL algorithms often assume that the number of agents within a group remains fixed throughout an experiment. However, in many practical problems, an agent may terminate before their teammates. This early termination issue presents a challenge: the terminated agent must learn from the group's success or failure which occurs beyond its own existence. We refer to propagating value from rewards earned by remaining teammates to terminated agents as the Posthumous Credit Assignment problem. Current MARL methods handle this problem by placing these agents in an absorbing state until the entire group of agents reaches a termination condition. Although absorbing states enable existing algorithms and APIs to handle terminated agents without modification, practical training efficiency and resource use problems exist. In this work, we first demonstrate that sample complexity increases with the quantity of absorbing states in a toy supervised learning task for a fully connected network, while attention is more robust to variable size input. Then, we present a novel architecture for an existing state-of-the-art MARL algorithm which uses attention instead of a fully connected layer with absorbing states. Finally, we demonstrate that this novel architecture significantly outperforms the standard architecture on tasks in which agents are created or destroyed within episodes as well as standard multi-agent coordination tasks.