 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Relevant Adversarial Imitation Learning
Oct 02, 2019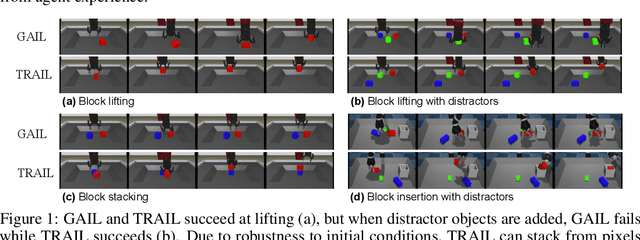
We show that a critical problem in adversarial imitation from high-dimensional sensory data is the tendency of discriminator networks to distinguish agent and expert behaviour using task-irrelevant features beyond the control of the agent. We analyze this problem in detail and propose a solution as well as several baselines that outperform standard Generative Adversarial Imitation Learning (GAIL). Our proposed solution, Task-Relevant Adversarial Imitation Learning (TRAIL), uses a constrained optimization objective to overcome task-irrelevant features. Comprehensive experiments show that TRAIL can solve challenging manipulation tasks from pixels by imitating human operators, where other agents such as behaviour cloning (BC), standard GAIL, improved GAIL variants including our newly proposed baselines, and Deterministic Policy Gradients from Demonstrations (DPGfD) fail to find solutions, even when the other agents have access to task reward.
A Framework for Data-Driven Robotics
Sep 26, 2019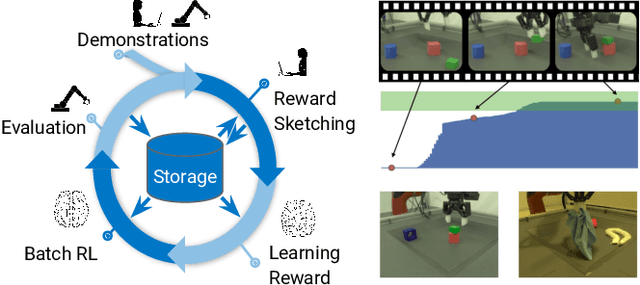
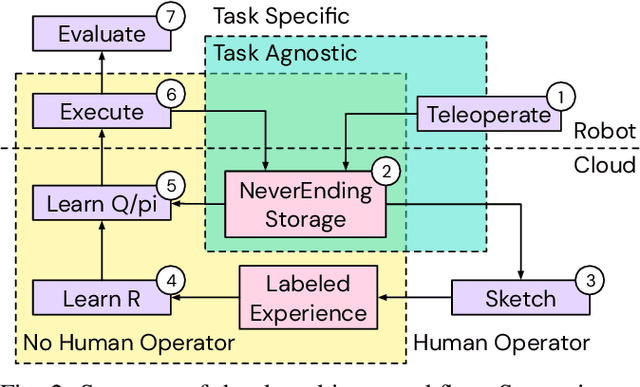
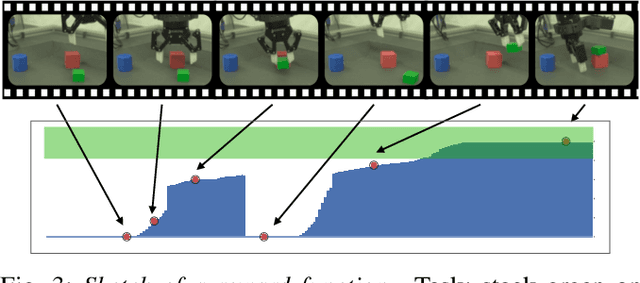
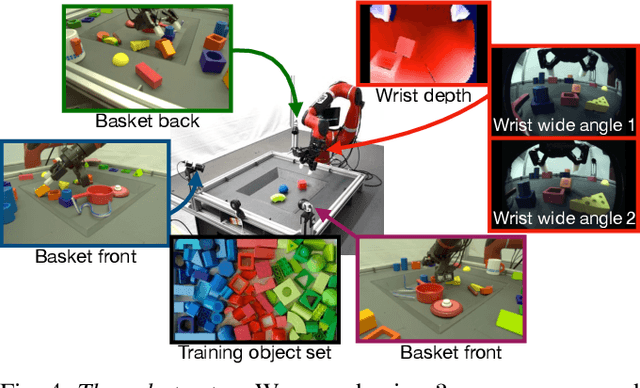
We present a framework for data-driven robotics that makes use of a large dataset of recorded robot experience and scales to several tasks using learned reward functions. We show how to apply this framework to accomplish three different object manipulation tasks on a real robot platform. Given demonstrations of a task together with task-agnostic recorded experience, we use a special form of human annotation as supervision to learn a reward function, which enables us to deal with real-world tasks where the reward signal cannot be acquired directly. Learned rewards are used in combination with a large dataset of experience from different tasks to learn a robot policy offline using batch RL. We show that using our approach it is possible to train agents to perform a variety of challenging manipulation tasks including stacking rigid objects and handling cloth.
Making Efficient Use of Demonstrations to Solve Hard Exploration Problems
Sep 03, 2019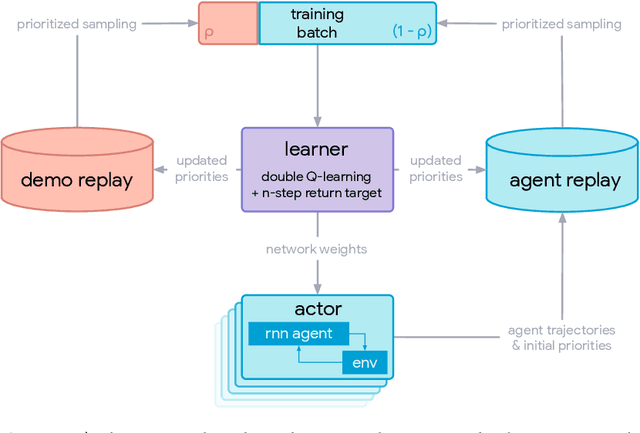
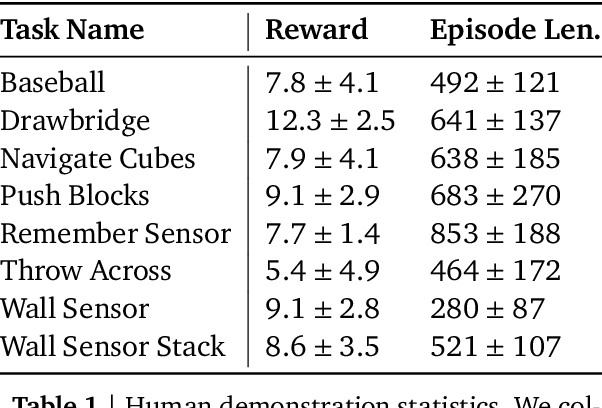
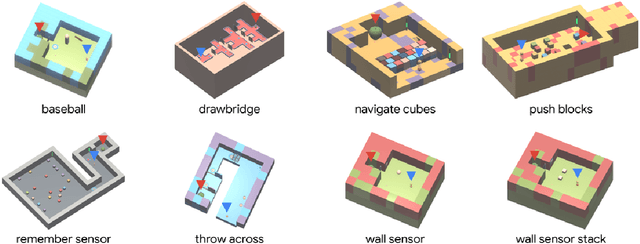
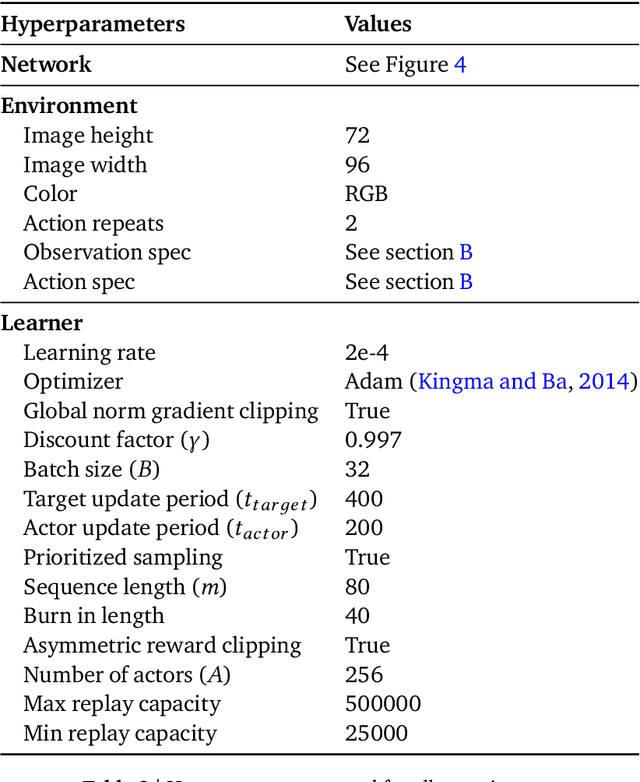
This paper introduces R2D3, an agent that makes efficient use of demonstrations to solve hard exploration problems in partially observable environments with highly variable initial conditions. We also introduce a suite of eight tasks that combine these three properties, and show that R2D3 can solve several of the tasks where other state of the art methods (both with and without demonstrations) fail to see even a single successful trajectory after tens of billions of steps of exploration.
Hyperbolic Attention Networks
May 24, 2018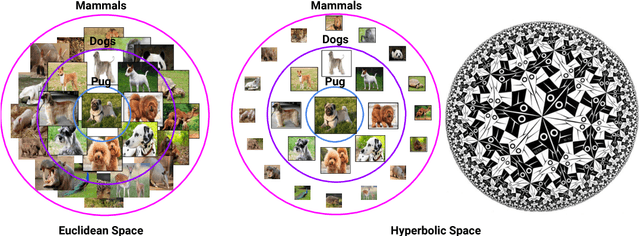
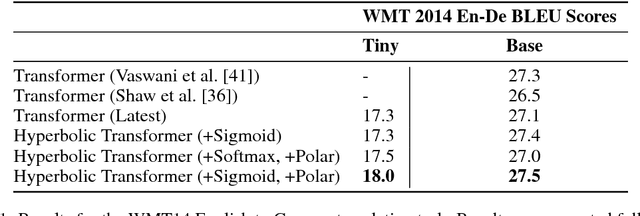
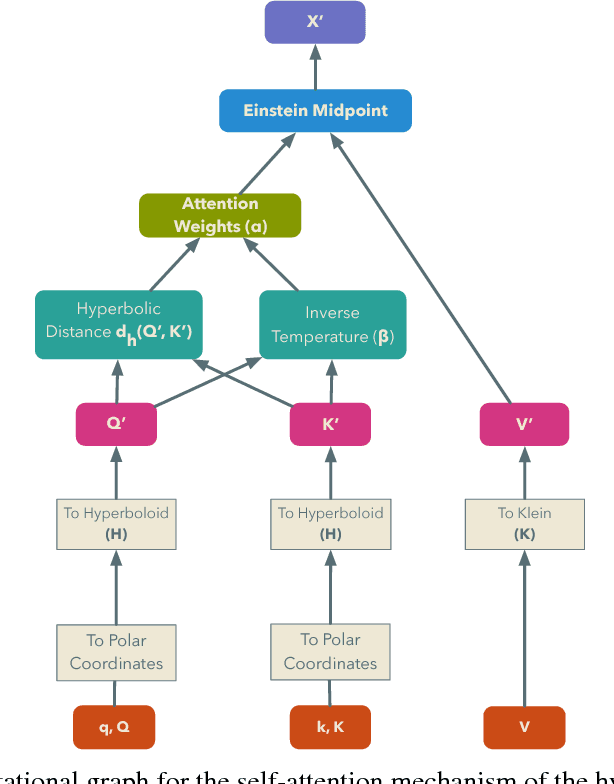
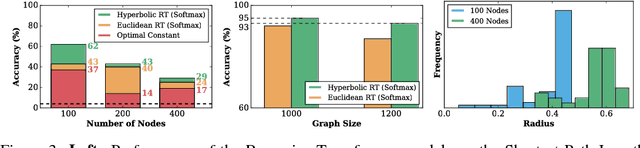
We introduce hyperbolic attention networks to endow neural networks with enough capacity to match the complexity of data with hierarchical and power-law structure. A few recent approaches have successfully demonstrated the benefits of imposing hyperbolic geometry on the parameters of shallow networks. We extend this line of work by imposing hyperbolic geometry on the activations of neural networks. This allows us to exploit hyperbolic geometry to reason about embeddings produced by deep networks. We achieve this by re-expressing the ubiquitous mechanism of soft attention in terms of operations defined for hyperboloid and Klein models. Our method shows improvements in terms of generalization on neural machine translation, learning on graphs and visual question answering tasks while keeping the neural representations compact.
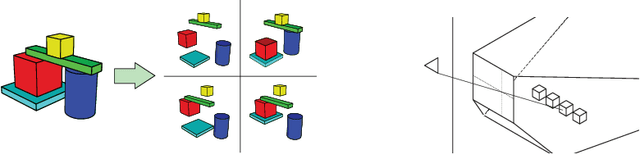
Learning Awareness Models
Apr 17, 2018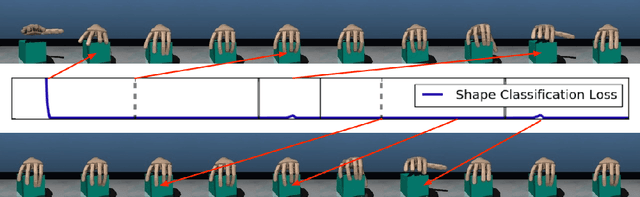
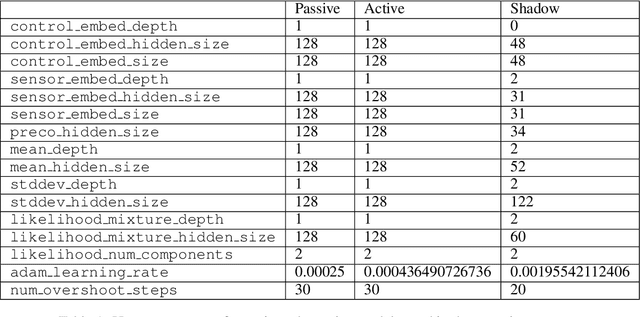
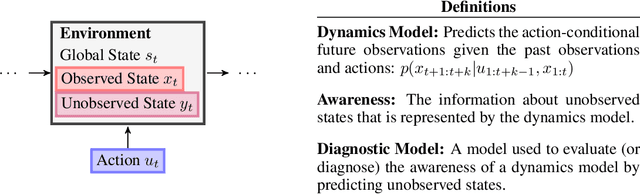
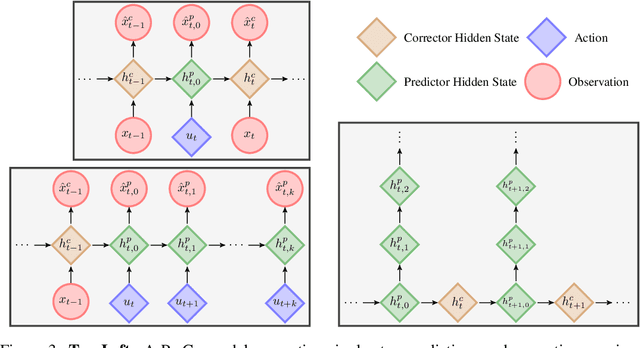
We consider the setting of an agent with a fixed body interacting with an unknown and uncertain external world. We show that models trained to predict proprioceptive information about the agent's body come to represent objects in the external world. In spite of being trained with only internally available signals, these dynamic body models come to represent external objects through the necessity of predicting their effects on the agent's own body. That is, the model learns holistic persistent representations of objects in the world, even though the only training signals are body signals. Our dynamics model is able to successfully predict distributions over 132 sensor readings over 100 steps into the future and we demonstrate that even when the body is no longer in contact with an object, the latent variables of the dynamics model continue to represent its shape. We show that active data collection by maximizing the entropy of predictions about the body---touch sensors, proprioception and vestibular information---leads to learning of dynamic models that show superior performance when used for control. We also collect data from a real robotic hand and show that the same models can be used to answer questions about properties of objects in the real world. Videos with qualitative results of our models are available at https://goo.gl/mZuqAV.
Learned Optimizers that Scale and Generalize
Sep 07, 2017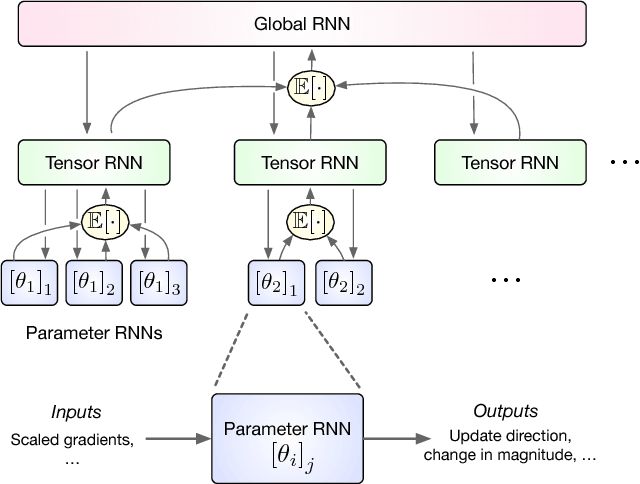
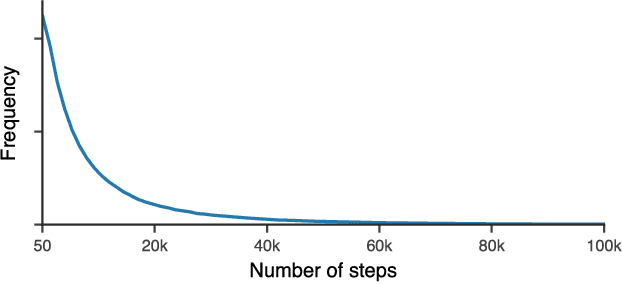
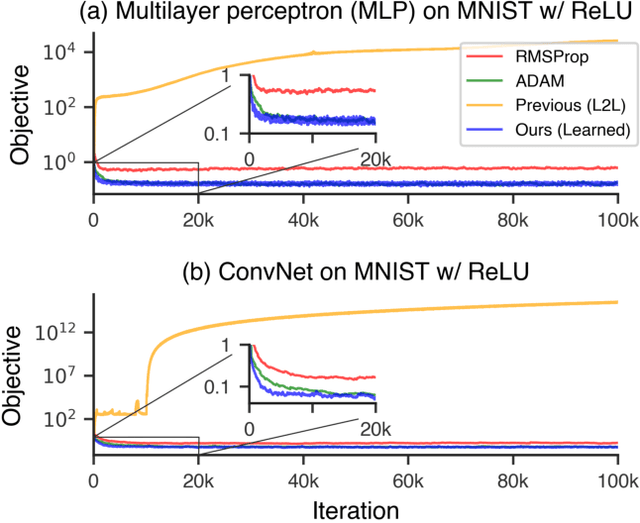
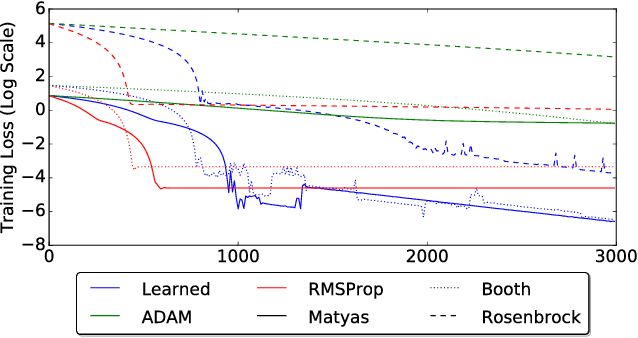
Learning to learn has emerged as an important direction for achieving artificial intelligence. Two of the primary barriers to its adoption are an inability to scale to larger problems and a limited ability to generalize to new tasks. We introduce a learned gradient descent optimizer that generalizes well to new tasks, and which has significantly reduced memory and computation overhead. We achieve this by introducing a novel hierarchical RNN architecture, with minimal per-parameter overhead, augmented with additional architectural features that mirror the known structure of optimization tasks. We also develop a meta-training ensemble of small, diverse optimization tasks capturing common properties of loss landscapes. The optimizer learns to outperform RMSProp/ADAM on problems in this corpus. More importantly, it performs comparably or better when applied to small convolutional neural networks, despite seeing no neural networks in its meta-training set. Finally, it generalizes to train Inception V3 and ResNet V2 architectures on the ImageNet dataset for thousands of steps, optimization problems that are of a vastly different scale than those it was trained on. We release an open source implementation of the meta-training algorithm.
Learning to Perform Physics Experiments via Deep Reinforcement Learning
Aug 17, 2017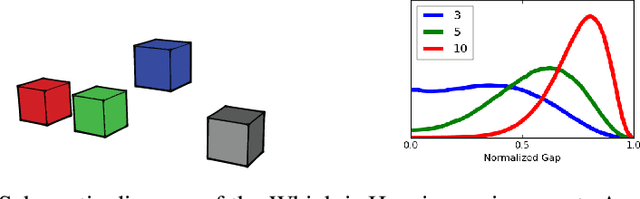
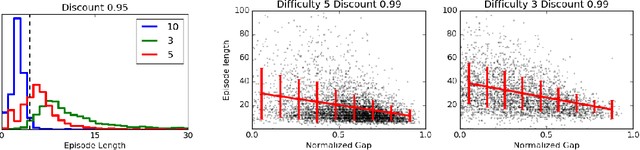
When encountering novel objects, humans are able to infer a wide range of physical properties such as mass, friction and deformability by interacting with them in a goal driven way. This process of active interaction is in the same spirit as a scientist performing experiments to discover hidden facts. Recent advances in artificial intelligence have yielded machines that can achieve superhuman performance in Go, Atari, natural language processing, and complex control problems; however, it is not clear that these systems can rival the scientific intuition of even a young child. In this work we introduce a basic set of tasks that require agents to estimate properties such as mass and cohesion of objects in an interactive simulated environment where they can manipulate the objects and observe the consequences. We found that state of art deep reinforcement learning methods can learn to perform the experiments necessary to discover such hidden properties. By systematically manipulating the problem difficulty and the cost incurred by the agent for performing experiments, we found that agents learn different strategies that balance the cost of gathering information against the cost of making mistakes in different situations.
The Intentional Unintentional Agent: Learning to Solve Many Continuous Control Tasks Simultaneously
Jul 11, 2017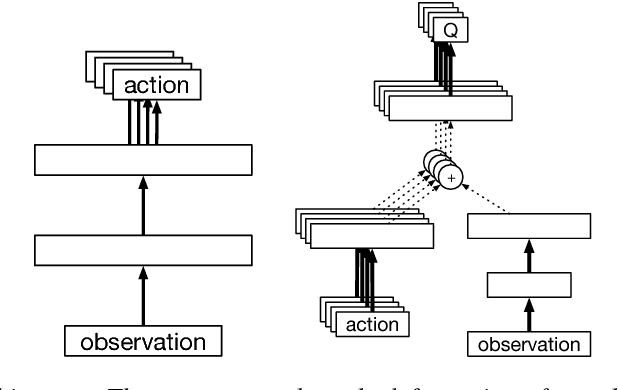
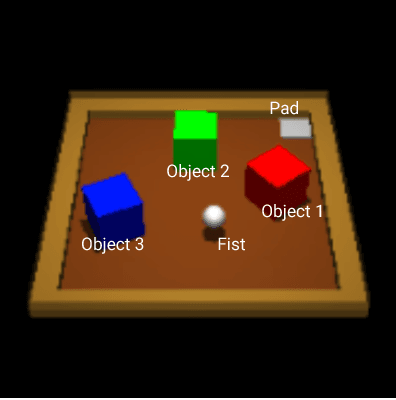
This paper introduces the Intentional Unintentional (IU) agent. This agent endows the deep deterministic policy gradients (DDPG) agent for continuous control with the ability to solve several tasks simultaneously. Learning to solve many tasks simultaneously has been a long-standing, core goal of artificial intelligence, inspired by infant development and motivated by the desire to build flexible robot manipulators capable of many diverse behaviours. We show that the IU agent not only learns to solve many tasks simultaneously but it also learns faster than agents that target a single task at-a-time. In some cases, where the single task DDPG method completely fails, the IU agent successfully solves the task. To demonstrate this, we build a playroom environment using the MuJoCo physics engine, and introduce a grounded formal language to automatically generate tasks.
Programmable Agents
Jun 20, 2017
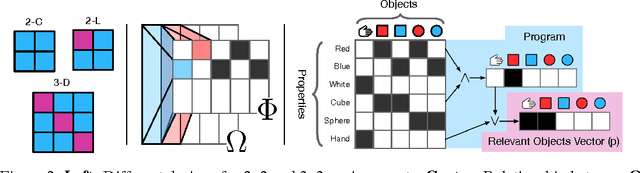

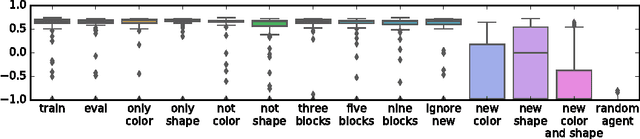
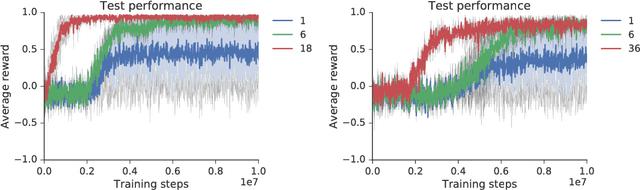
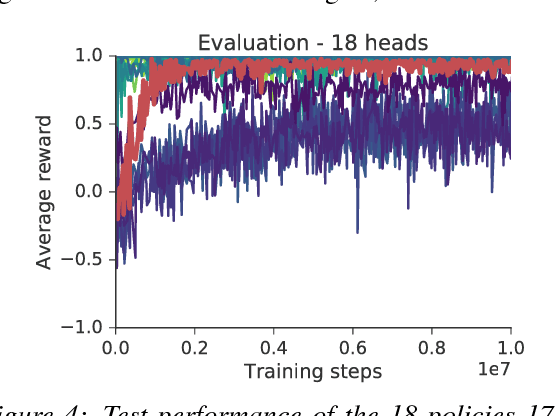
We build deep RL agents that execute declarative programs expressed in formal language. The agents learn to ground the terms in this language in their environment, and can generalize their behavior at test time to execute new programs that refer to objects that were not referenced during training. The agents develop disentangled interpretable representations that allow them to generalize to a wide variety of zero-shot semantic tasks.
Learning to Learn without Gradient Descent by Gradient Descent
Jun 12, 2017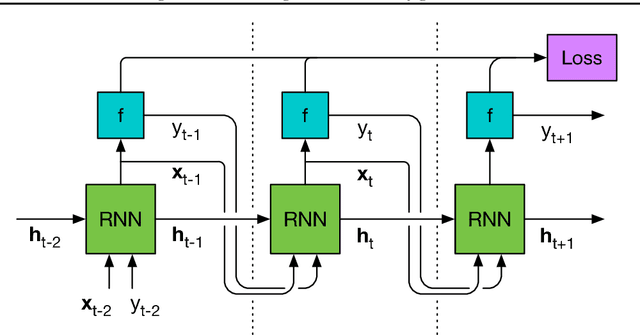
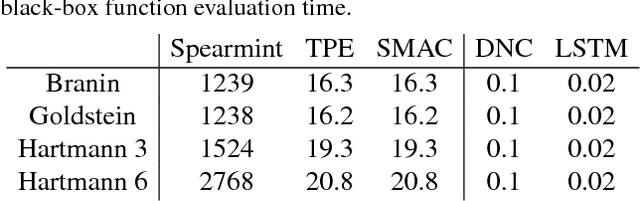
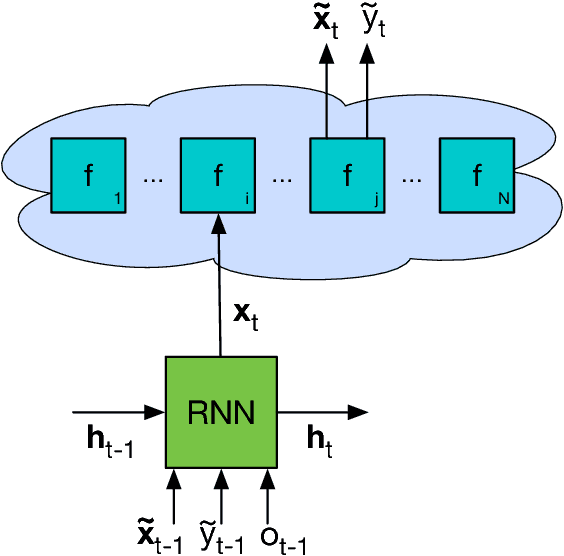
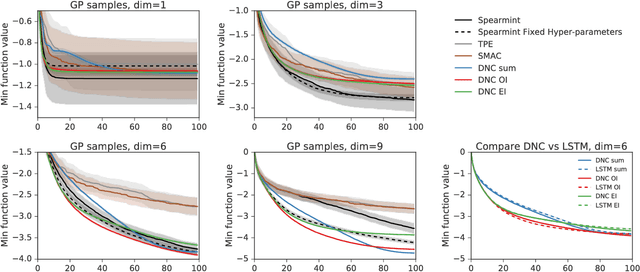
We learn recurrent neural network optimizers trained on simple synthetic functions by gradient descent. We show that these learned optimizers exhibit a remarkable degree of transfer in that they can be used to efficiently optimize a broad range of derivative-free black-box functions, including Gaussian process bandits, simple control objectives, global optimization benchmarks and hyper-parameter tuning tasks. Up to the training horizon, the learned optimizers learn to trade-off exploration and exploitation, and compare favourably with heavily engineered Bayesian optimization packages for hyper-parameter tuning.