 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Intentional Unintentional Agent: Learning to Solve Many Continuous Control Tasks Simultaneously
Paper and Code
Jul 11, 2017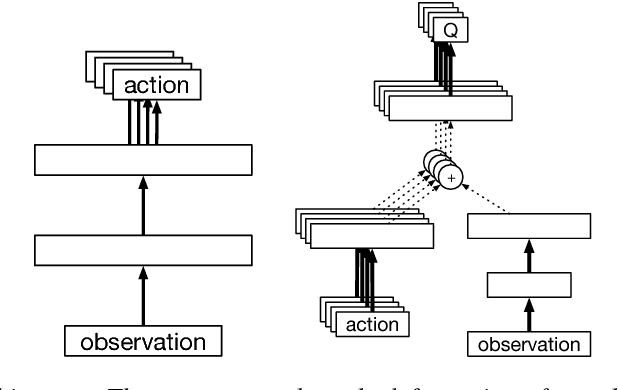
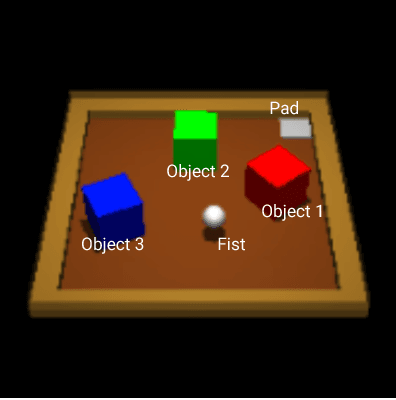
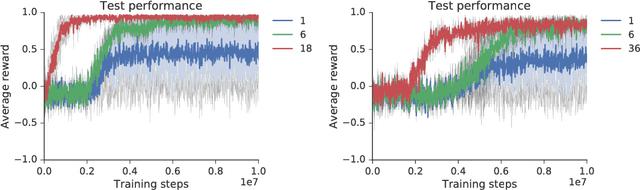
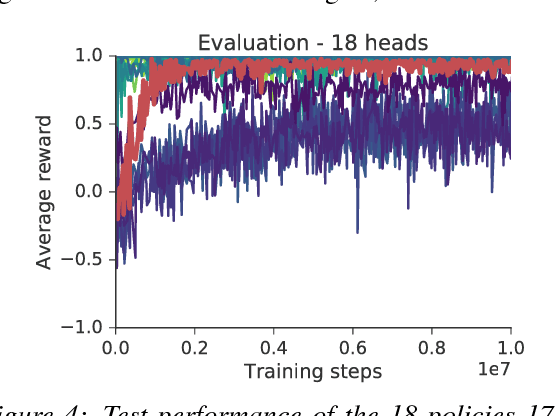
This paper introduces the Intentional Unintentional (IU) agent. This agent endows the deep deterministic policy gradients (DDPG) agent for continuous control with the ability to solve several tasks simultaneously. Learning to solve many tasks simultaneously has been a long-standing, core goal of artificial intelligence, inspired by infant development and motivated by the desire to build flexible robot manipulators capable of many diverse behaviours. We show that the IU agent not only learns to solve many tasks simultaneously but it also learns faster than agents that target a single task at-a-time. In some cases, where the single task DDPG method completely fails, the IU agent successfully solves the task. To demonstrate this, we build a playroom environment using the MuJoCo physics engine, and introduce a grounded formal language to automatically generate tasks.