 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating scientific discovery with the common task framework
Nov 06, 2025Machine learning (ML) and artificial intelligence (AI) algorithms are transforming and empowering the characterization and control of dynamic systems in the engineering, physical, and biological sciences. These emerging modeling paradigms require comparative metrics to evaluate a diverse set of scientific objectives, including forecasting, state reconstruction, generalization, and control, while also considering limited data scenarios and noisy measurements. We introduce a common task framework (CTF) for science and engineering, which features a growing collection of challenge data sets with a diverse set of practical and common objectives. The CTF is a critically enabling technology that has contributed to the rapid advance of ML/AI algorithms in traditional applications such as speech recognition, language processing, and computer vision. There is a critical need for the objective metrics of a CTF to compare the diverse algorithms being rapidly developed and deployed in practice today across science and engineering.
Skillful joint probabilistic weather forecasting from marginals
Jun 12, 2025



Machine learning (ML)-based weather models have rapidly risen to prominence due to their greater accuracy and speed than traditional forecasts based on numerical weather prediction (NWP), recently outperforming traditional ensembles in global probabilistic weather forecasting. This paper presents FGN, a simple, scalable and flexible modeling approach which significantly outperforms the current state-of-the-art models. FGN generates ensembles via learned model-perturbations with an ensemble of appropriately constrained models. It is trained directly to minimize the continuous rank probability score (CRPS) of per-location forecasts. It produces state-of-the-art ensemble forecasts as measured by a range of deterministic and probabilistic metrics, makes skillful ensemble tropical cyclone track predictions, and captures joint spatial structure despite being trained only on marginals.
GenCast: Diffusion-based ensemble forecasting for medium-range weather
Dec 25, 2023



Probabilistic weather forecasting is critical for decision-making in high-impact domains such as flood forecasting, energy system planning or transportation routing, where quantifying the uncertainty of a forecast -- including probabilities of extreme events -- is essential to guide important cost-benefit trade-offs and mitigation measures. Traditional probabilistic approaches rely on producing ensembles from physics-based models, which sample from a joint distribution over spatio-temporally coherent weather trajectories, but are expensive to run. An efficient alternative is to use a machine learning (ML) forecast model to generate the ensemble, however state-of-the-art ML forecast models for medium-range weather are largely trained to produce deterministic forecasts which minimise mean-squared-error. Despite improving skills scores, they lack physical consistency, a limitation that grows at longer lead times and impacts their ability to characterize the joint distribution. We introduce GenCast, a ML-based generative model for ensemble weather forecasting, trained from reanalysis data. It forecasts ensembles of trajectories for 84 weather variables, for up to 15 days at 1 degree resolution globally, taking around a minute per ensemble member on a single Cloud TPU v4 device. We show that GenCast is more skillful than ENS, a top operational ensemble forecast, for more than 96\% of all 1320 verification targets on CRPS and Ensemble-Mean RMSE, while maintaining good reliability and physically consistent power spectra. Together our results demonstrate that ML-based probabilistic weather forecasting can now outperform traditional ensemble systems at 1 degree, opening new doors to skillful, fast weather forecasts that are useful in key applications.
Neural General Circulation Models
Nov 28, 2023General circulation models (GCMs) are the foundation of weather and climate prediction. GCMs are physics-based simulators which combine a numerical solver for large-scale dynamics with tuned representations for small-scale processes such as cloud formation. Recently, machine learning (ML) models trained on reanalysis data achieved comparable or better skill than GCMs for deterministic weather forecasting. However, these models have not demonstrated improved ensemble forecasts, or shown sufficient stability for long-term weather and climate simulations. Here we present the first GCM that combines a differentiable solver for atmospheric dynamics with ML components, and show that it can generate forecasts of deterministic weather, ensemble weather and climate on par with the best ML and physics-based methods. NeuralGCM is competitive with ML models for 1-10 day forecasts, and with the European Centre for Medium-Range Weather Forecasts ensemble prediction for 1-15 day forecasts. With prescribed sea surface temperature, NeuralGCM can accurately track climate metrics such as global mean temperature for multiple decades, and climate forecasts with 140 km resolution exhibit emergent phenomena such as realistic frequency and trajectories of tropical cyclones. For both weather and climate, our approach offers orders of magnitude computational savings over conventional GCMs. Our results show that end-to-end deep learning is compatible with tasks performed by conventional GCMs, and can enhance the large-scale physical simulations that are essential for understanding and predicting the Earth system.
Diffusion Generative Inverse Design
Sep 18, 2023



Inverse design refers to the problem of optimizing the input of an objective function in order to enact a target outcome. For many real-world engineering problems, the objective function takes the form of a simulator that predicts how the system state will evolve over time, and the design challenge is to optimize the initial conditions that lead to a target outcome. Recent developments in learned simulation have shown that graph neural networks (GNNs) can be used for accurate, efficient, differentiable estimation of simulator dynamics, and support high-quality design optimization with gradient- or sampling-based optimization procedures. However, optimizing designs from scratch requires many expensive model queries, and these procedures exhibit basic failures on either non-convex or high-dimensional problems. In this work, we show how denoising diffusion models (DDMs) can be used to solve inverse design problems efficiently and propose a particle sampling algorithm for further improving their efficiency. We perform experiments on a number of fluid dynamics design challenges, and find that our approach substantially reduces the number of calls to the simulator compared to standard techniques.
WeatherBench 2: A benchmark for the next generation of data-driven global weather models
Aug 29, 2023WeatherBench 2 is an update to the global, medium-range (1-14 day) weather forecasting benchmark proposed by Rasp et al. (2020), designed with the aim to accelerate progress in data-driven weather modeling. WeatherBench 2 consists of an open-source evaluation framework, publicly available training, ground truth and baseline data as well as a continuously updated website with the latest metrics and state-of-the-art models: https://sites.research.google/weatherbench. This paper describes the design principles of the evaluation framework and presents results for current state-of-the-art physical and data-driven weather models. The metrics are based on established practices for evaluating weather forecasts at leading operational weather centers. We define a set of headline scores to provide an overview of model performance. In addition, we also discuss caveats in the current evaluation setup and challenges for the future of data-driven weather forecasting.
GraphCast: Learning skillful medium-range global weather forecasting
Dec 24, 2022



We introduce a machine-learning (ML)-based weather simulator--called "GraphCast"--which outperforms the most accurate deterministic operational medium-range weather forecasting system in the world, as well as all previous ML baselines. GraphCast is an autoregressive model, based on graph neural networks and a novel high-resolution multi-scale mesh representation, which we trained on historical weather data from the European Centre for Medium-Range Weather Forecasts (ECMWF)'s ERA5 reanalysis archive. It can make 10-day forecasts, at 6-hour time intervals, of five surface variables and six atmospheric variables, each at 37 vertical pressure levels, on a 0.25-degree latitude-longitude grid, which corresponds to roughly 25 x 25 kilometer resolution at the equator. Our results show GraphCast is more accurate than ECMWF's deterministic operational forecasting system, HRES, on 90.0% of the 2760 variable and lead time combinations we evaluated. GraphCast also outperforms the most accurate previous ML-based weather forecasting model on 99.2% of the 252 targets it reported. GraphCast can generate a 10-day forecast (35 gigabytes of data) in under 60 seconds on Cloud TPU v4 hardware. Unlike traditional forecasting methods, ML-based forecasting scales well with data: by training on bigger, higher quality, and more recent data, the skill of the forecasts can improve. Together these results represent a key step forward in complementing and improving weather modeling with ML, open new opportunities for fast, accurate forecasting, and help realize the promise of ML-based simulation in the physical sciences.
Learning rigid dynamics with face interaction graph networks
Dec 07, 2022



Simulating rigid collisions among arbitrary shapes is notoriously difficult due to complex geometry and the strong non-linearity of the interactions. While graph neural network (GNN)-based models are effective at learning to simulate complex physical dynamics, such as fluids, cloth and articulated bodies, they have been less effective and efficient on rigid-body physics, except with very simple shapes. Existing methods that model collisions through the meshes' nodes are often inaccurate because they struggle when collisions occur on faces far from nodes. Alternative approaches that represent the geometry densely with many particles are prohibitively expensive for complex shapes. Here we introduce the Face Interaction Graph Network (FIGNet) which extends beyond GNN-based methods, and computes interactions between mesh faces, rather than nodes. Compared to learned node- and particle-based methods, FIGNet is around 4x more accurate in simulating complex shape interactions, while also 8x more computationally efficient on sparse, rigid meshes. Moreover, FIGNet can learn frictional dynamics directly from real-world data, and can be more accurate than analytical solvers given modest amounts of training data. FIGNet represents a key step forward in one of the few remaining physical domains which have seen little competition from learned simulators, and offers allied fields such as robotics, graphics and mechanical design a new tool for simulation and model-based planning.
MultiScale MeshGraphNets
Oct 02, 2022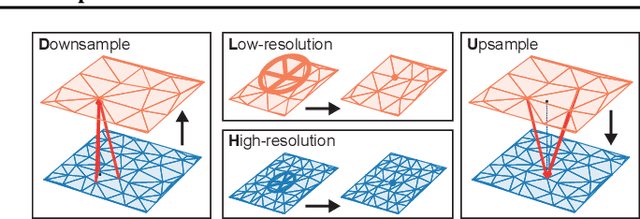
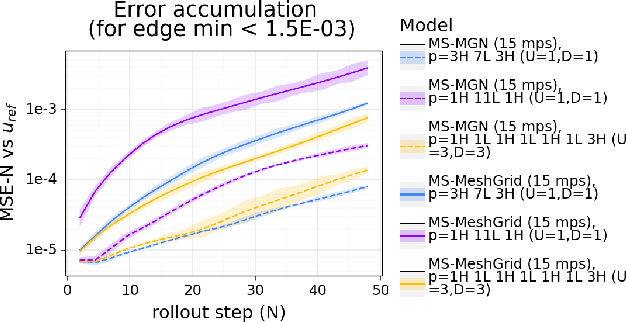
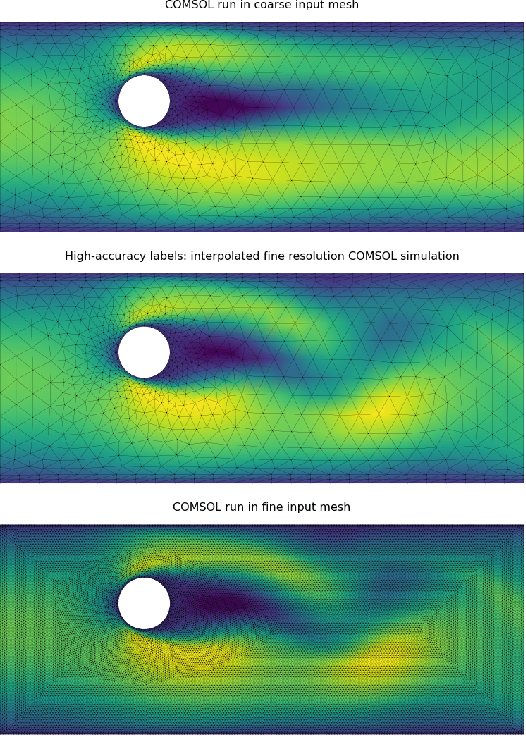
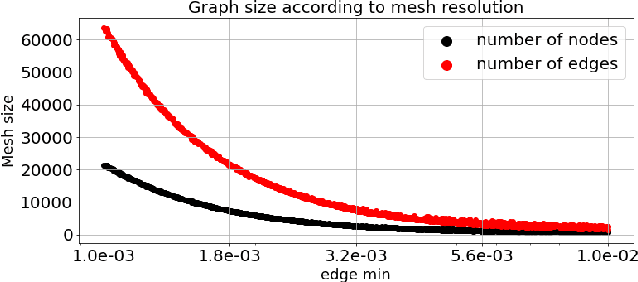
In recent years, there has been a growing interest in using machine learning to overcome the high cost of numerical simulation, with some learned models achieving impressive speed-ups over classical solvers whilst maintaining accuracy. However, these methods are usually tested at low-resolution settings, and it remains to be seen whether they can scale to the costly high-resolution simulations that we ultimately want to tackle. In this work, we propose two complementary approaches to improve the framework from MeshGraphNets, which demonstrated accurate predictions in a broad range of physical systems. MeshGraphNets relies on a message passing graph neural network to propagate information, and this structure becomes a limiting factor for high-resolution simulations, as equally distant points in space become further apart in graph space. First, we demonstrate that it is possible to learn accurate surrogate dynamics of a high-resolution system on a much coarser mesh, both removing the message passing bottleneck and improving performance; and second, we introduce a hierarchical approach (MultiScale MeshGraphNets) which passes messages on two different resolutions (fine and coarse), significantly improving the accuracy of MeshGraphNets while requiring less computational resources.
TF-GNN: Graph Neural Networks in TensorFlow
Jul 07, 2022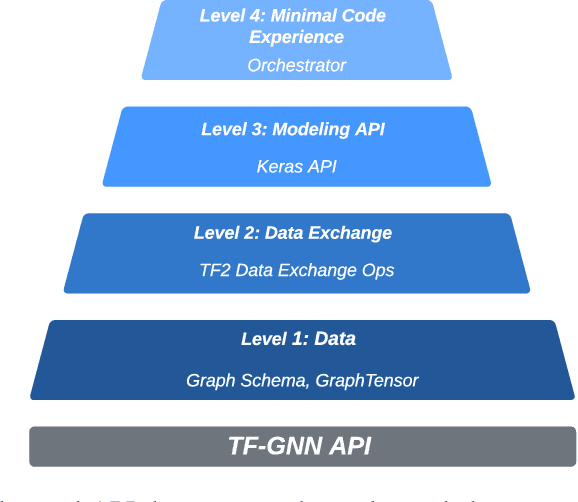
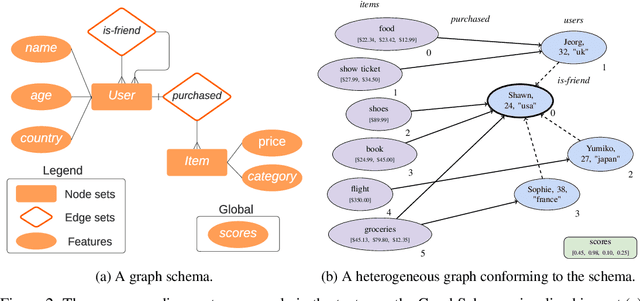
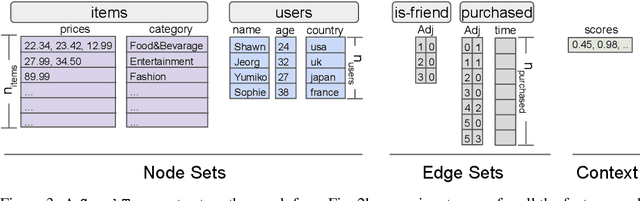
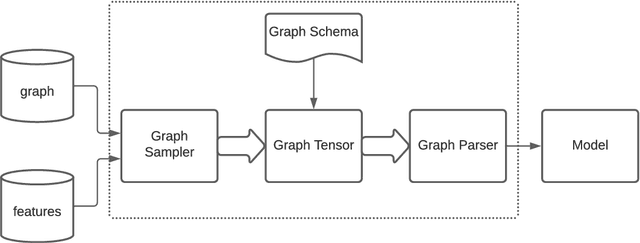
TensorFlow GNN (TF-GNN) is a scalable library for Graph Neural Networks in TensorFlow. It is designed from the bottom up to support the kinds of rich heterogeneous graph data that occurs in today's information ecosystems. Many production models at Google use TF-GNN and it has been recently released as an open source project. In this paper, we describe the TF-GNN data model, its Keras modeling API, and relevant capabilities such as graph sampling, distributed training, and accelerator support.